Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirte?
Soporte experto: Resuelve problemas técnicos y de posventa con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Preestrenos exclusivos: Obtén acceso anticipado a anuncios de nuevos productos y adelantos.
Descuentos exclusivos: Disfruta de descuentos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones especiales durante las festividades.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [here] y únete hoy mismo.
Ajuste del Servo (Importante)
Nota
Si tu Robot HAT es versión V44 o superior (con el altavoz ubicado en la parte superior de la placa) e incluye un botón Zero integrado, puedes omitir este paso y simplemente presionar el botón Zero para activar el programa de centrado del servo.

El rango de ángulo del servo es de -90 a 90, pero el ángulo configurado de fábrica es aleatorio: puede ser 0°, 45° u otro valor. Si lo ensamblamos directamente con ese ángulo, provocará un estado caótico cuando el robot ejecute el código o, peor aún, hará que el servo se bloquee y se queme.
Por lo tanto, es necesario configurar todos los servos a 0° antes de instalarlos, de modo que el ángulo del servo quede en el punto medio, independientemente de la dirección en la que gire.
Para asegurarte de que el servo se haya configurado correctamente en 0°, primero inserta el brazo del servo en el eje y luego gira suavemente el brazo a un ángulo diferente. Este brazo del servo es solo para que puedas ver claramente que el servo está girando.

Ahora, ejecuta
servo_zeroing.pyen la carpetaexample/.cd ~/picar-x/example sudo python3 servo_zeroing.py
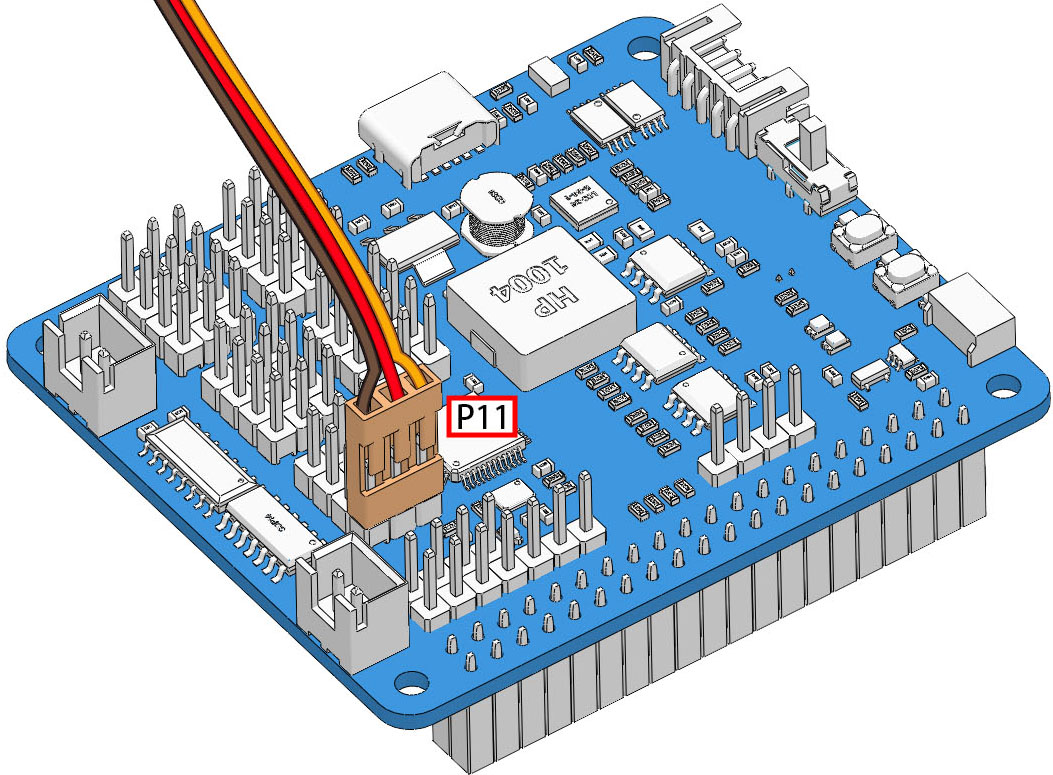
A continuación, conecta el cable del servo al puerto P11 como se muestra a continuación. Al mismo tiempo, verás que el brazo del servo gira a una posición (esta es la posición de 0°, que es una ubicación aleatoria y puede no ser vertical ni paralela).
Ahora, retira el brazo del servo asegurándote de que el cable del servo permanezca conectado y no apagues la alimentación. Luego continúa con el ensamblaje siguiendo las instrucciones en papel.
Nota
No desconectes el cable del servo antes de fijarlo con el tornillo del servo; puedes desconectarlo después de fijarlo.
No gires el servo mientras esté encendido para evitar daños; si el eje del servo no está insertado en el ángulo correcto, retira el servo y vuelve a insertarlo.
Antes de ensamblar cada servo, debes conectar el cable del servo al P11 y encender la alimentación para ajustar su ángulo a 0°.