Download and Run the Code¶
Download the Code Install Libraries¶
We can download the files by using git clone in the command line.
cd /home/pi/
git clone https://github.com/sunfounder/pan-tilt-hat.git
cd pan-tilt-hat
sudo python3 install.py
Note
Running install.py will download some necessary components. You may fail to download due to network problems. You may need to download again at this time.
Run servo_zeroing.py¶
Run the servo_zeroing.py in the examples/ folder.
cd /home/pi/pan-tilt-hat/examples
sudo python3 servo_zeroing.py
To make sure you can see that the servo has been set to 0°, you can insert a rocker arm in the servo shaft first and then turn the servo to another angle.

Now follow the diagram below and insert the servo to the P0/P1 position.
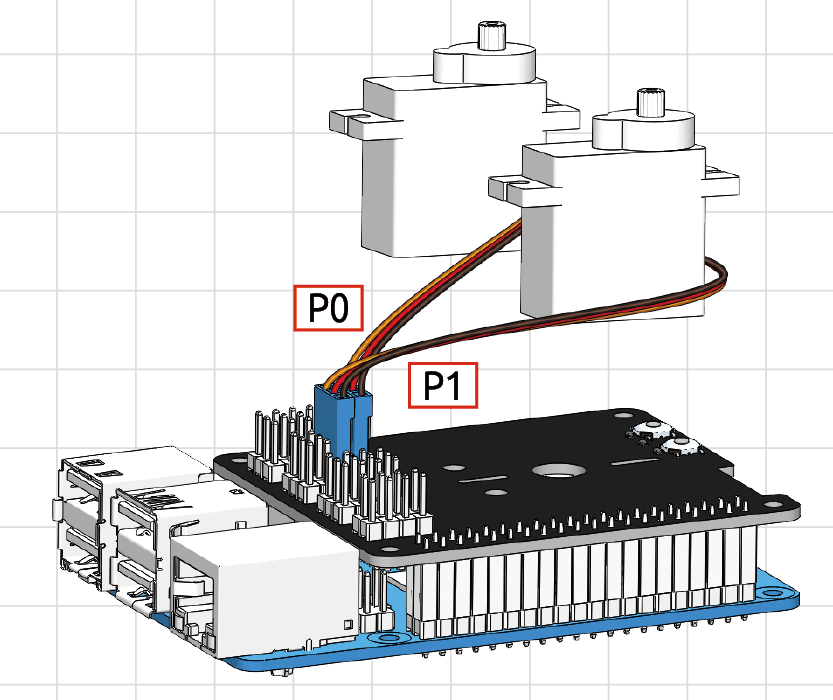
Now if the servo arm shifts and stops at a specific position, the function will take effect. If it is not, please check the insertion direction of the servo cable and re-run the code.