Note
Bonjour, bienvenue dans la communauté SunFounder Raspberry Pi, Arduino & ESP32 sur Facebook ! Plongez dans l’univers de Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques grâce à l’aide de notre communauté et de notre équipe.
Apprendre & Partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Avant-premières exclusives : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus exclusifs.
Réductions spéciales : Profitez de remises exclusives sur nos derniers produits.
Promotions festives et cadeaux : Participez à des concours et promotions spéciales.
👉 Prêt à explorer et créer avec nous ? Cliquez sur [ici] et rejoignez-nous dès aujourd’hui !
3.7 - Faire Balancer le Servo
Dans ce kit, en plus de la LED et du buzzer passif, il y a aussi un dispositif contrôlé par un signal PWM, le servo.
Un servo est un dispositif de positionnement (angle) idéal pour les systèmes de contrôle nécessitant des ajustements d’angle constants et pouvant être maintenus. Il est largement utilisé dans les jouets télécommandés haut de gamme, comme les avions, les modèles de sous-marins, et les robots télécommandés.
Maintenant, essayez de faire balancer le servo !
Composants requis
Dans ce projet, nous avons besoin des composants suivants.
Il est pratique d’acheter un kit complet, voici le lien :
Nom |
ARTICLES DANS CE KIT |
LIEN D’ACHAT |
|---|---|---|
Kit Kepler |
450+ |
Vous pouvez également les acheter séparément via les liens ci-dessous.
N° |
INTRODUCTION DES COMPOSANTS |
QUANTITÉ |
LIEN D’ACHAT |
|---|---|---|---|
1 |
1 |
||
2 |
Câble Micro USB |
1 |
|
3 |
1 |
||
4 |
Plusieurs |
||
5 |
1 |
Schéma
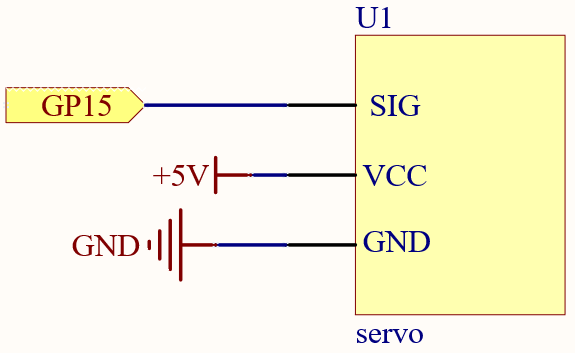
Câblage

Le fil orange est le signal et est connecté à GP15.
Le fil rouge est le VCC et est connecté à VBUS (5V).
Le fil marron est la masse (GND) et est connecté à GND.
Code
Note
Vous pouvez ouvrir le fichier
3.7_swinging_servo.inodans le cheminkepler-kit-main/arduino/3.7_swinging_servo.Ou copiez ce code dans Arduino IDE.
N’oubliez pas de sélectionner la carte (Raspberry Pi Pico) et le port correct avant de cliquer sur le bouton Upload.
Lorsque le programme est en cours d’exécution, vous pourrez voir le bras du servo osciller d’avant en arrière de 0° à 180°.
Comment ça marche ?
En utilisant la bibliothèque Servo.h, vous pouvez facilement contrôler le servo.
#include <Servo.h>
Fonctions de la bibliothèque
Servo
Créer un objet Servo pour contrôler un servo.
uint8_t attach(int pin);
Attribue une broche pour piloter le servo. Appelle pinMode. Retourne 0 en cas d’échec.
void detach();
Libère la broche du contrôle du servo.
void write(int value);
Définit l’angle du servo en degrés, de 0 à 180.
int read();
Retourne la dernière valeur définie avec write().
bool attached();
Retourne 1 si le servo est actuellement connecté.