注釈
SunFounderのRaspberry Pi & Arduino & ESP32愛好家Facebookコミュニティへようこそ!仲間の愛好家と一緒に、Raspberry Pi、Arduino、ESP32をより深く探求しましょう。
参加する理由
エキスパートサポート:コミュニティとチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換しましょう。
限定プレビュー:新製品の発表や先行公開にいち早くアクセスできます。
特別割引:最新製品を特別割引価格でご購入いただけます。
お祭りキャンペーンとプレゼント:プレゼント企画やホリデープロモーションに参加しましょう。
👉 一緒に探求し創造する準備はできましたか? [here] をクリックして今すぐ参加しましょう!
クイックプレイ with Scratch
この章では、 Scratch(Mammoth Coding)でサンプルプロジェクトをすばやく開いて実行 し、GalaxyRVR を動作させる方法を学びます。
これらのスクリプトをゼロから作成する方法を学びたい場合は、Scratchでのプログラミング の章を参照してください。
注釈
GalaxyRVR の R3 ボードには、RoboPilot App と Mammoth Coding をサポートするファームウェアが付属しています。
ファームウェアを上書きしてしまい、通信を復元する必要がある場合は、3. R3 ボードファームウェアの更新 に従ってください。
Scratch サンプルをすばやく開く方法
以下のリンクからサンプルコードをダウンロードします:
ダウンロードしたファイルを解凍し、
scratch_codesフォルダーをモバイルデバイスに転送します。 ES File Explorer や File Transfer Assistant など、任意のファイル転送ツールを使用できます。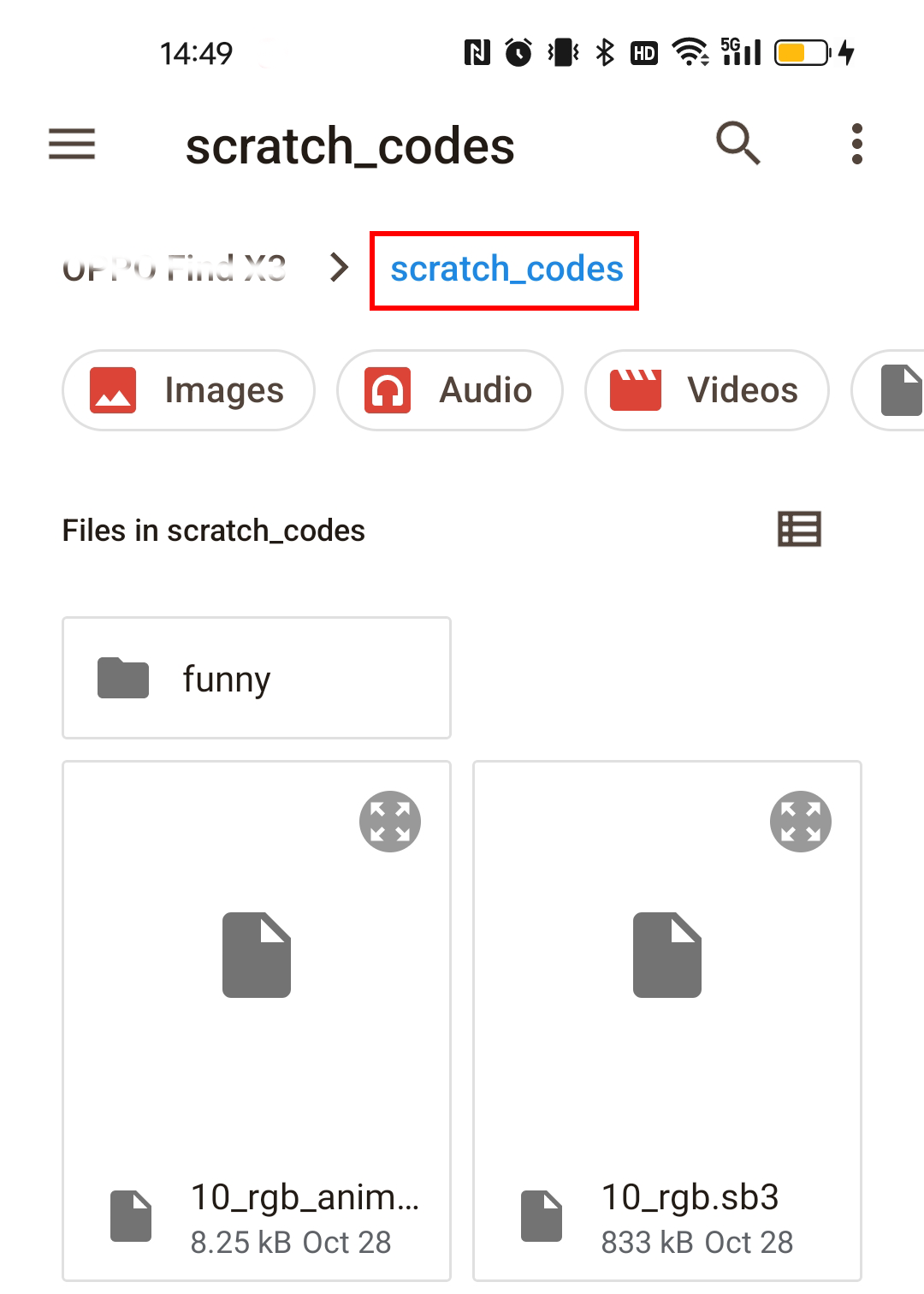
Google Play または Apple App Store で Mammoth Coding を検索してインストールします。
GalaxyRVR を起動します。
GalaxyRVR を初めて使用する前に、付属の Type-C USB ケーブルでバッテリーを完全に充電してください。
電源スイッチをオンにします。
モードを Run に切り替え、R3 ボードの Reset ボタンを押します。
底部のライトストリップが 緑色 に点滅し、起動成功を示します。
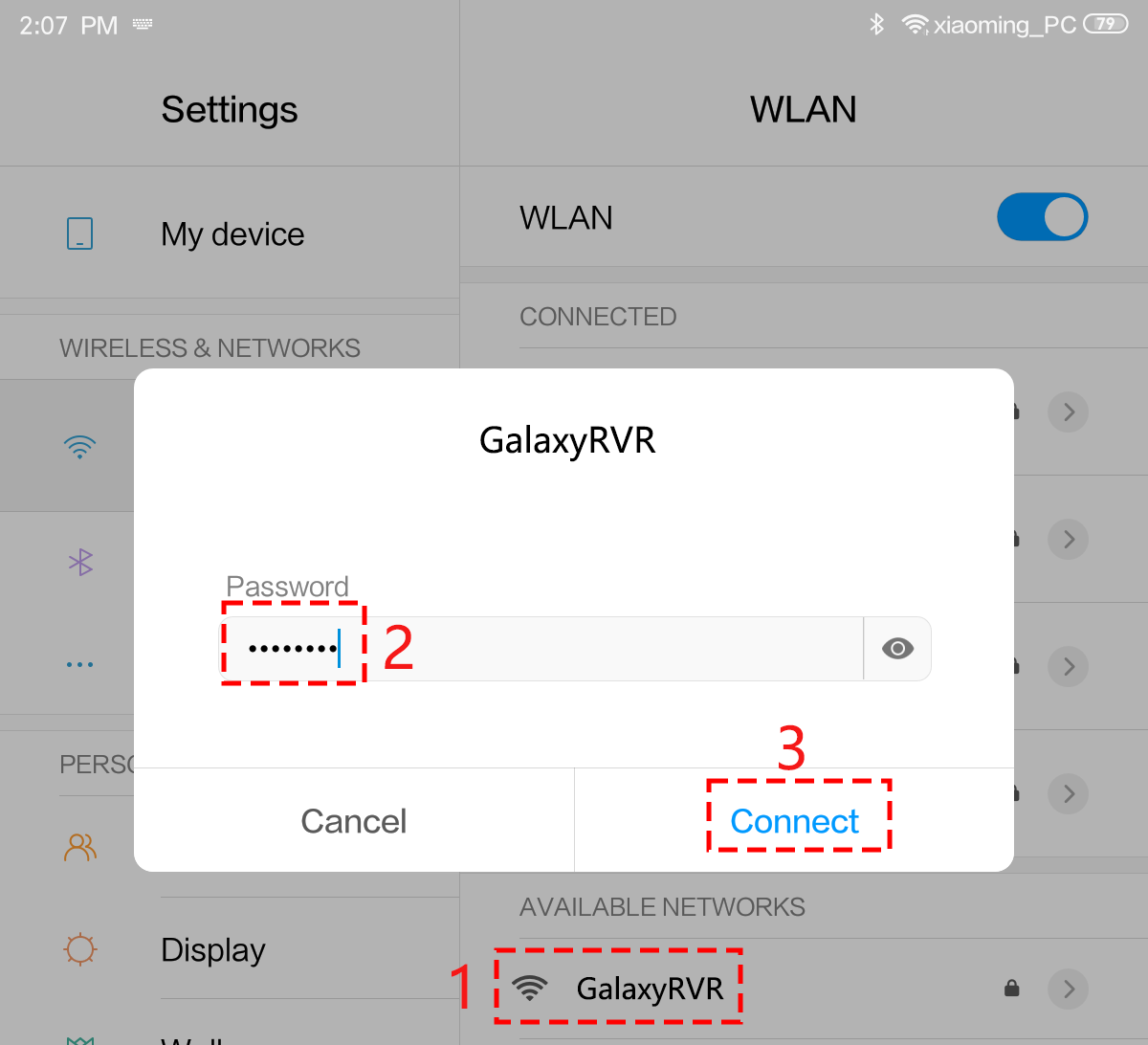
モバイルデバイスを GalaxyRVR の WiFi ネットワークに接続します。
ネットワーク名(SSID)は
GalaxyRVR、パスワードは12345678です。「インターネットなし」という警告が表示された場合は、 「接続したままにする」 を選択してください。
アプリで File > Open from device をタップして、ローカルファイルを参照します。
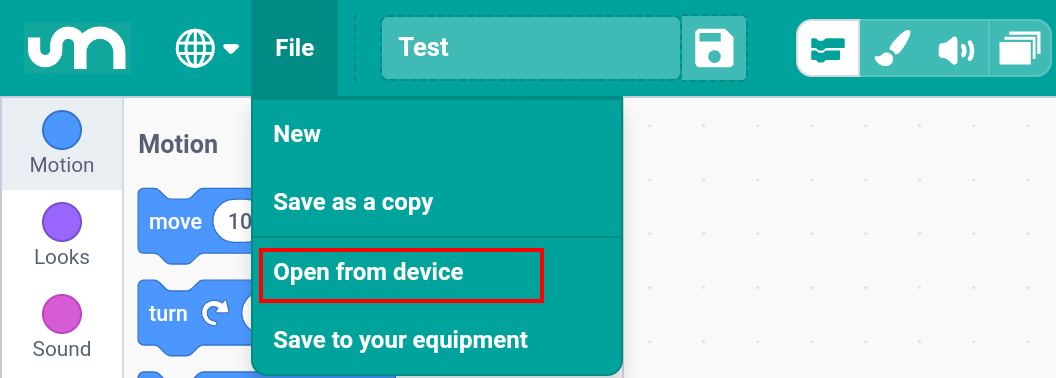
.sb3ファイルを選択して開きます。
緑色の旗アイコンをタップしてスクリプトを開始します。
サンプル
基本プロジェクト
これらのプロジェクトは、Mammoth Coding で GalaxyRVR を制御するための基本コースです。GalaxyRVR の活用方法を段階的にガイドします。
3_move.sb3:方向キーを使用して GalaxyRVR の動きをリアルタイムで制御します。4_ultrasonic.sb3:ローバーが前進し、超音波モジュールを使用して自動的に障害物を回避します。5_ultra_animate_jump.sb3:ローバーが火星の表面で楽しそうに動き回るアニメーションシーンを作成します。6_ir_obstacle_avoid.sb3:ローバーが前進し、IR センサーを使用して障害物を回避します。7_ir_obstacle_avoid_animate.sb3:手で IR センサーをトリガーして、火星表面の岩をかわすローバースプライトを制御します。8_ir_ultrasonic_avoid.sb3:ローバーが超音波センサーと IR センサーを一緒に使用して、障害物をスムーズに回避します。9_ir_ultrasonic_follow.sb3:ローバーがあなたに追従します:あなたが前に立つと近づき、横に立つとあなたの方を向き、離れると停止します。10_rgb.sb3:色付きのボールをタップして、ローバーの RGB ライトをその色で光らせます。10_rgb_animate.sb3:押された方向キーに応じてローバーが移動し、ライトの色が変わります。1scratch_servo.sb3:矢印キーを使用してローバーのカメラ角度を調整し、クリックで位置をリセットします。1scratch_servo_stage.sb3:画面上の矢印をタッチしてドラッグし、ローバーのカメラをスムーズにリアルタイムで操作します。12_camera.sb3:探索中にローバーの視点からライブカメラ映像を表示します。13_realtime_control.sb3:Scratch を通じてローバーの動きとライトをリアルタイムで制御します。
楽しいプロジェクト
これらの楽しい Scratch プロジェクトには GalaxyRVR は必要ありません。
これらはすべて scratch_codes/fun/ フォルダーにあります。
1_scratch_balloon.sb3:左の IR センサーを塞いで風船を膨らませます。割れたり落ちたりしないようにしましょう!2_flappy_parrot.sb3:超音波センサーの上に手をかざしてオウムの飛行を制御し、竹の棒をかわします。3_shooting.sb3:障害物回避モジュールを使用して照準を合わせ、ターゲットを撃ちます。4_eat_apple.sb3:左の IR センサーで検出した手のジェスチャーを使って、カブトムシをリンゴまで誘導します。5_fishing.sb3:適切なタイミングで左の IR センサーを塞いで魚を釣ります。6_sensitive_ball.sb3:超音波センサーの上に手をかざしてボールを上下に動かします。線に触れると音と光がトリガーされます。7_tap_white_tile.sb3:2 つの IR センサーを使用して黒いタイルをタップして得点します。白いタイルは避けてください!