注釈
SunFounderのRaspberry Pi & Arduino & ESP32愛好家Facebookコミュニティへようこそ!仲間の愛好家と一緒に、Raspberry Pi、Arduino、ESP32をより深く探求しましょう。
参加する理由
エキスパートサポート:コミュニティとチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換しましょう。
限定プレビュー:新製品の発表や先行公開にいち早くアクセスできます。
特別割引:最新製品を特別割引価格でご購入いただけます。
お祭りキャンペーンとプレゼント:プレゼント企画やホリデープロモーションに参加しましょう。
👉 一緒に探求し創造する準備はできましたか? [here] をクリックして今すぐ参加しましょう!
クイックプレイ with Arduino
この章では、 特定の Arduino サンプルコードをすばやく開いて実行 し、GalaxyRVR にさまざまな動作をさせる方法を学びます。
これらのサンプルのコードロジックやプログラミング原理を理解したい場合は、Arduino IDE でプログラミング の章を参照してください。
Arduino サンプルをすばやく開く方法
この例では、Arduino IDE を使用して Arduino サンプルを開く方法を説明します。
GalaxyRVR を起動します。
GalaxyRVR を初めて使用する際は、Type-C USB ケーブルを接続してバッテリーを完全に充電することをお勧めします。その後、電源をオンにします。
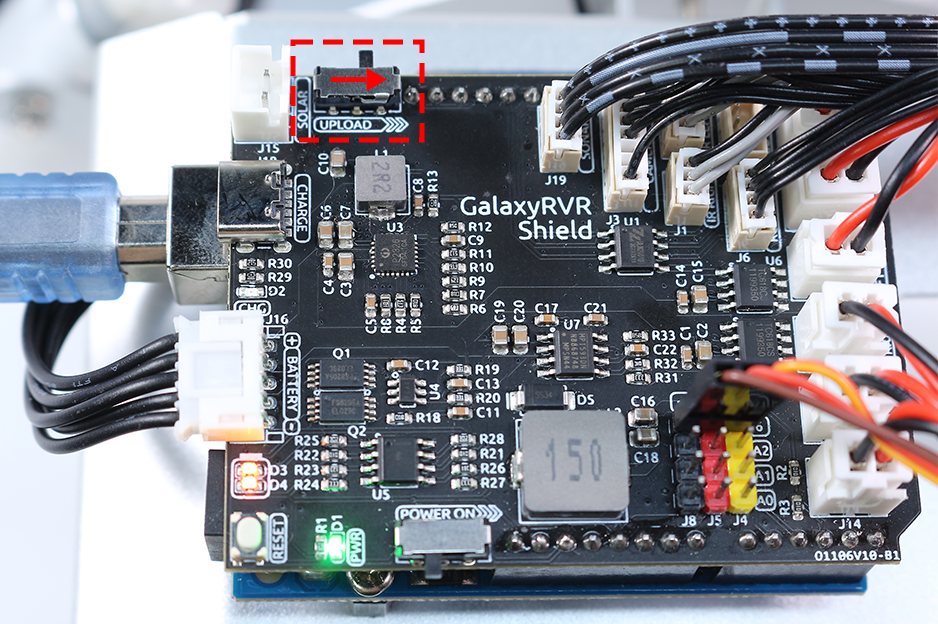
ESP32-CAM と Arduino ボードは同じ RX(受信)および TX(送信)ピンを共有しています。そのため、コードをアップロードする前に、このスイッチを右側にスライドして ESP32-CAM を解放し、競合や潜在的な問題を回避する必要があります。
USB ケーブルを使用して Arduino ボードをコンピューターに接続します。
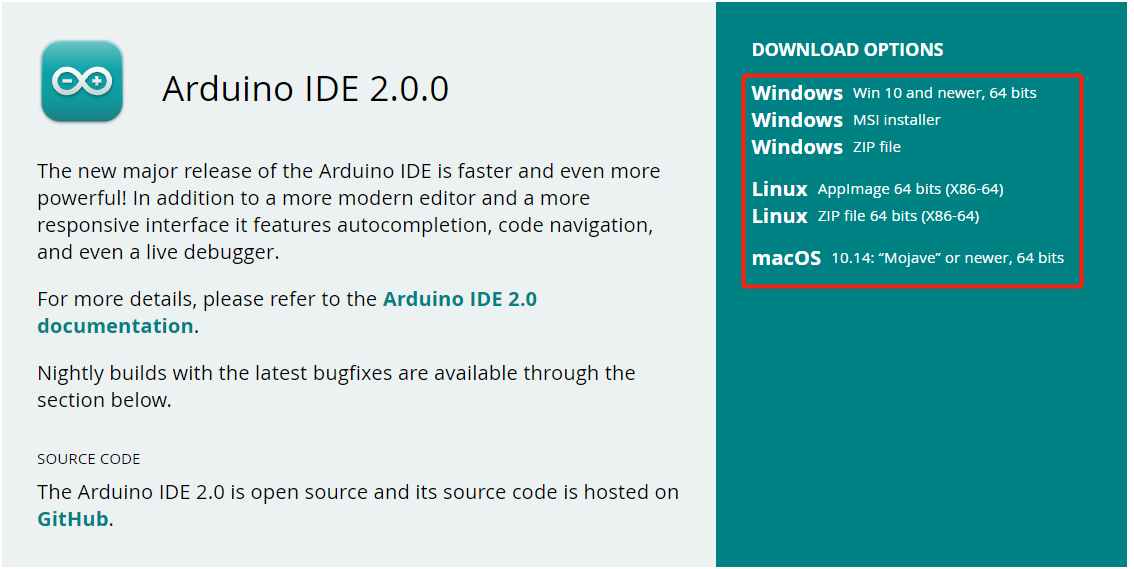
Arduino IDE 2.0.0 Page にアクセスし、お使いのオペレーティングシステム用の Arduino IDE をダウンロードします。インストールの指示に従ってセットアップを完了します。
以下のリンクからサンプルコードをダウンロードします:
ダウンロードしたファイルを解凍し、
galaxy-rvr-1.2.x\lesson_codesに移動します。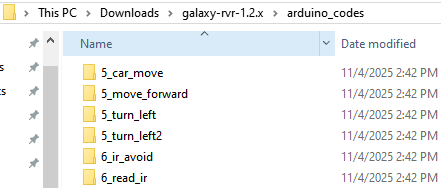
サンプルコードのフォルダーを選択し、そのフォルダーに移動して、
.inoファイルをダブルクリックして Arduino IDE で開きます。
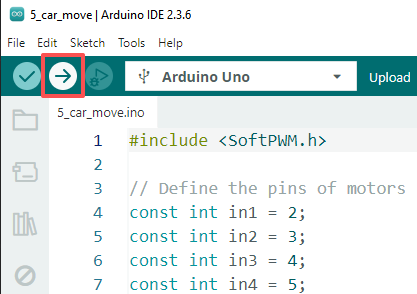
Arduino IDE で、ボードとして Arduino Uno を選択し、デバイスに適した ** ポート** を選択します。
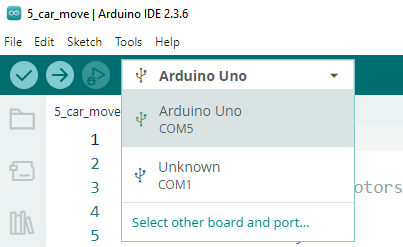
Upload ボタン(右向き矢印)をクリックして、コードをボードにアップロードします。
サンプル
5_car_move:ローバーが前進、後退、左右に旋回し、最後に停止します。6_ir_avoid:ローバーが IR センサーを使用して障害物を回避します。7_ultrasonic_avoid:ローバーが超音波モジュールを使用して障害物を回避します。8_ultrasonic_ir_avoid:ローバーが IR と超音波モジュールの両方を使用して障害物を検出します。8_ultrasonic_ir_follow:ローバーが IR と超音波モジュールを使用して物体を追跡します。9_rgb_car_move:移動に色インジケーターを追加:前進は緑、後退は赤、左右旋回は黄色。10_servo_range:カメラジンバルが for ループを使用して 0 ° から 180 ° まで回転し、現在の角度がシリアルモニターに表示されます。11_camera_view:ウェブブラウザでローバーのカメラからのライブビデオ映像を表示します。 SunFounder AI Camera ライブラリが必要です。13_read_battery:コードを通じてバッテリー電圧を監視します。