注釈
SunFounderのRaspberry Pi & Arduino & ESP32愛好家Facebookコミュニティへようこそ!仲間の愛好家と一緒に、Raspberry Pi、Arduino、ESP32をより深く探求しましょう。
参加する理由
エキスパートサポート:コミュニティとチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換しましょう。
限定プレビュー:新製品の発表や先行公開にいち早くアクセスできます。
特別割引:最新製品を特別割引価格でご購入いただけます。
お祭りキャンペーンとプレゼント:プレゼント企画やホリデープロモーションに参加しましょう。
👉 一緒に探求し創造する準備はできましたか? [here] をクリックして今すぐ参加しましょう!
クイックプレイ with APP
火星の冒険を始める準備はできましたか? RoboPilot アプリのクイックスタート機能を使えば、GalaxyRVR の組み立てが完了したらすぐに探索を開始できます。
RoboPilot では、以下のことができます:
一人称視点でローバーを運転
リモート 、 回避 、 追従 の 3 つの制御モードを切り替え
注釈
ファームウェアを上書きしてしまい、通信を復元する必要がある場合は、3. R3 ボードファームウェアの更新 に従ってください。
クイックガイド
GalaxyRVR を起動します。
GalaxyRVR を初めて使用する前に、付属の Type-C USB ケーブルでバッテリーを完全に充電してください。
電源スイッチをオンにします。
モードを Run に切り替え、R3 ボードの Reset ボタンを押します。
底部のライトストリップが 緑色 に点滅し、起動成功を示します。
APP Store(iOS) または Google Play(Android) から RoboPilot をインストールします。
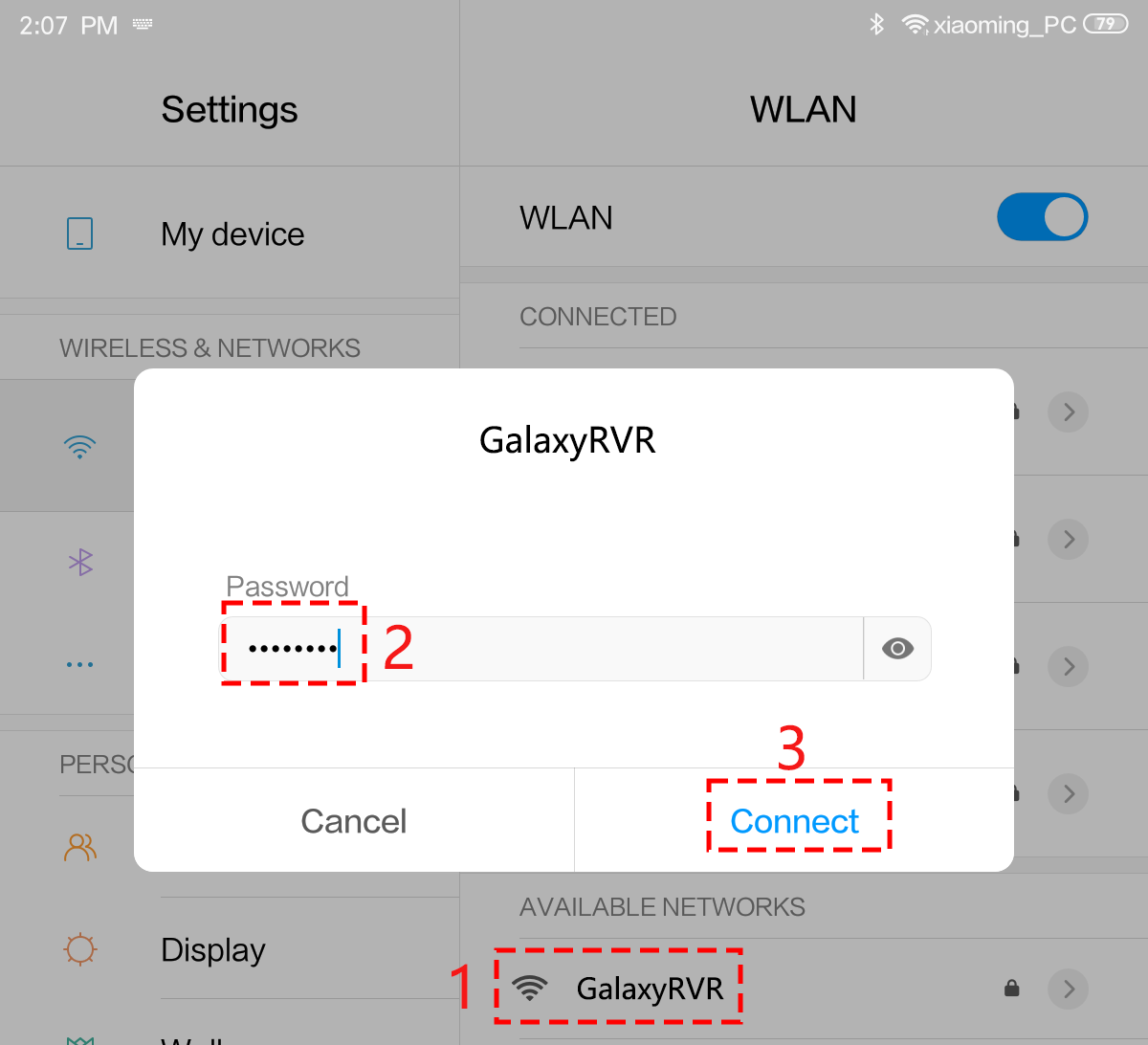
モバイルデバイスを GalaxyRVR の WiFi ネットワークに接続します。
ネットワーク名(SSID)は
GalaxyRVR、パスワードは12345678です。「インターネットなし」という警告が表示された場合は、 「接続したままにする」 を選択してください。
RoboPilot を開きます。「Go into」をクリックしてコントロールインターフェースに入ります。

リモートモード
コントロールインターフェースに入ると、以下の画面が表示されます。 背景には GalaxyRVR のカメラで撮影された映像が表示され、リモートコントロールウィジェットが重なっています。
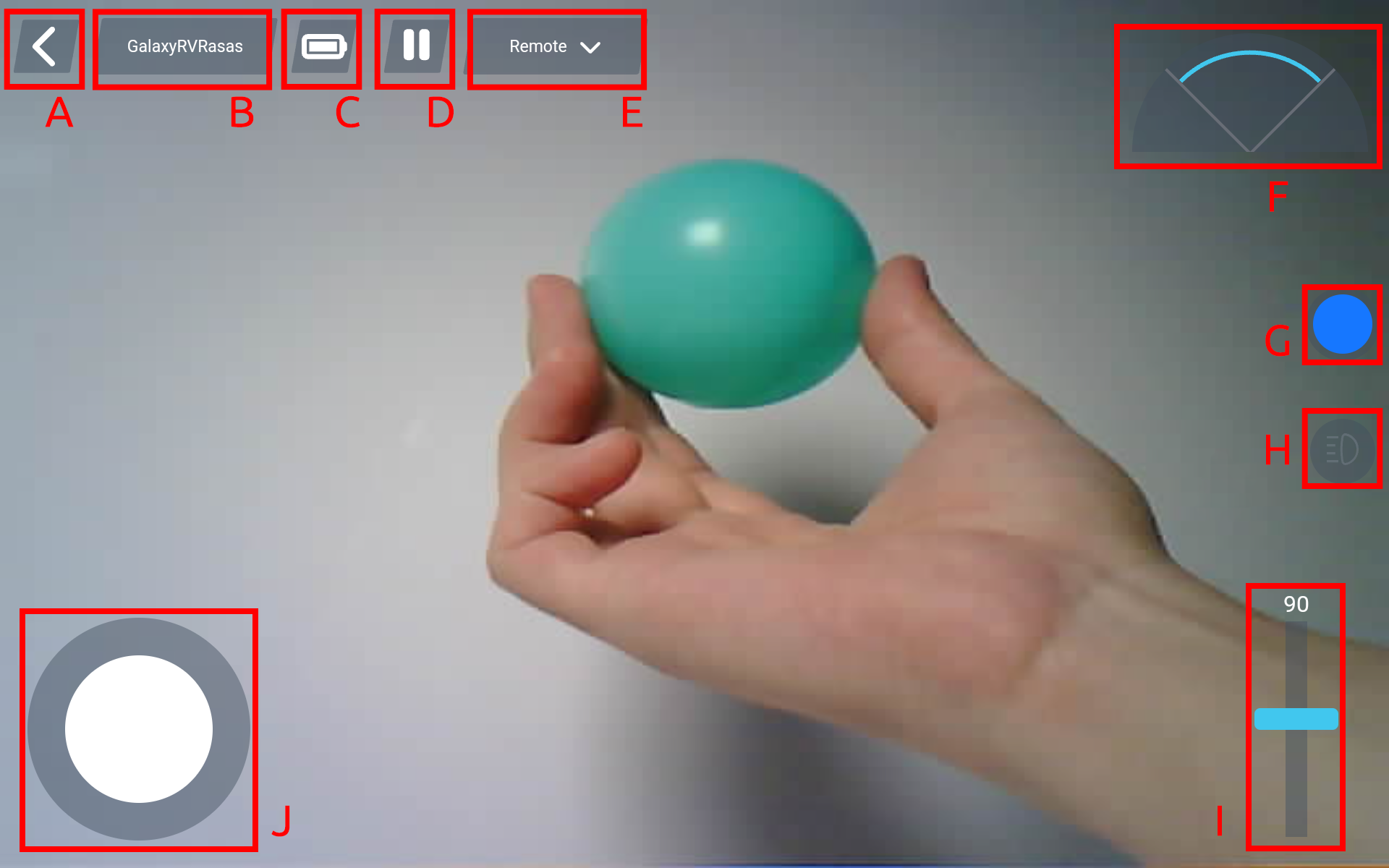
以下がコントロールです:
戻る
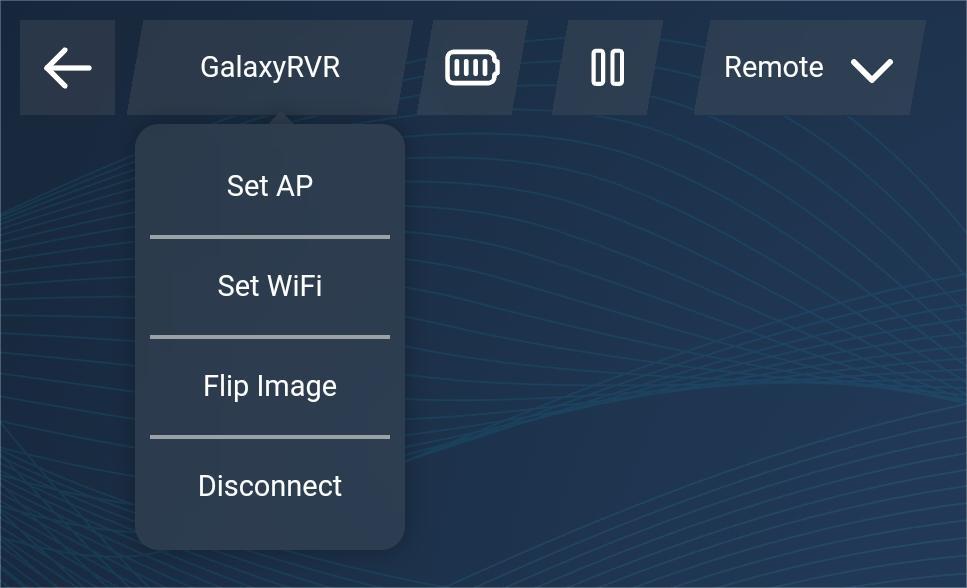
設定:ここで AP(ホットスポット)の名前とパスワードを変更したり、WiFi の設定、画像の反転、切断を行うことができます。
バッテリー残量インジケーター
アプリの一時停止/実行
モード選択:ここでリモートモード、回避モード、追従モードを選択できます。デフォルトは リモートモード です。

障害物モニター:このモジュールは 3 つのエリアに分かれており、左右のエリアは障害物モジュールの結果を表示し、中央のエリアは超音波センサーの検出結果を表示します。
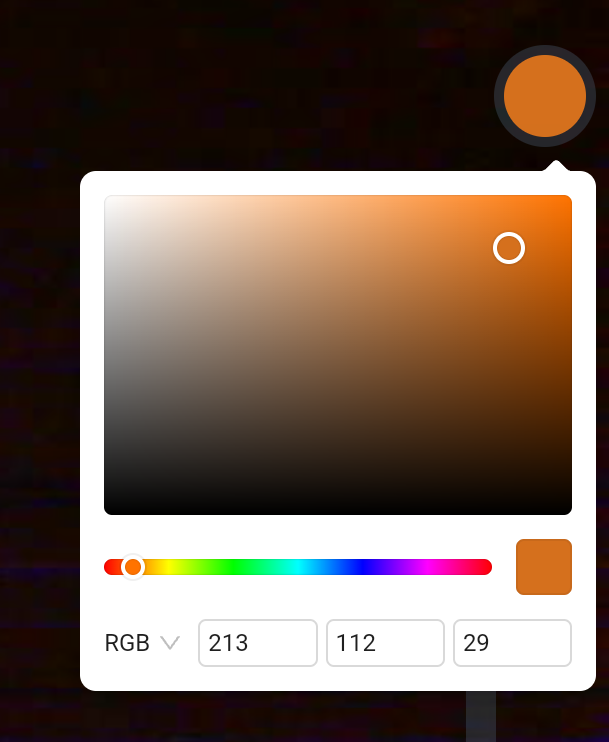
カラーセレクター:ここでシャーシの照明色を選択します。
カメラ LED スイッチ
ジンバル角度の調整(0〜130 °)。0 ° では空を見上げます。
ジョイスティックを動かして GalaxyRVR の動きを制御します。軽く押すと GalaxyRVR はゆっくり動きます。
回避モード & 追従モード
回避モード :GalaxyRVR は前方に進み、進路上の障害物を回避します。
追従モード :GalaxyRVR は前方の物体に向かって移動するか、左右に旋回して物体の動きに追従します。
回避モード または ** 追従モード** を選択すると、以下のインターフェースが表示されます。GalaxyRVR のライブカメラ映像が背景となり、その上にコントロールオプションが重なっています。
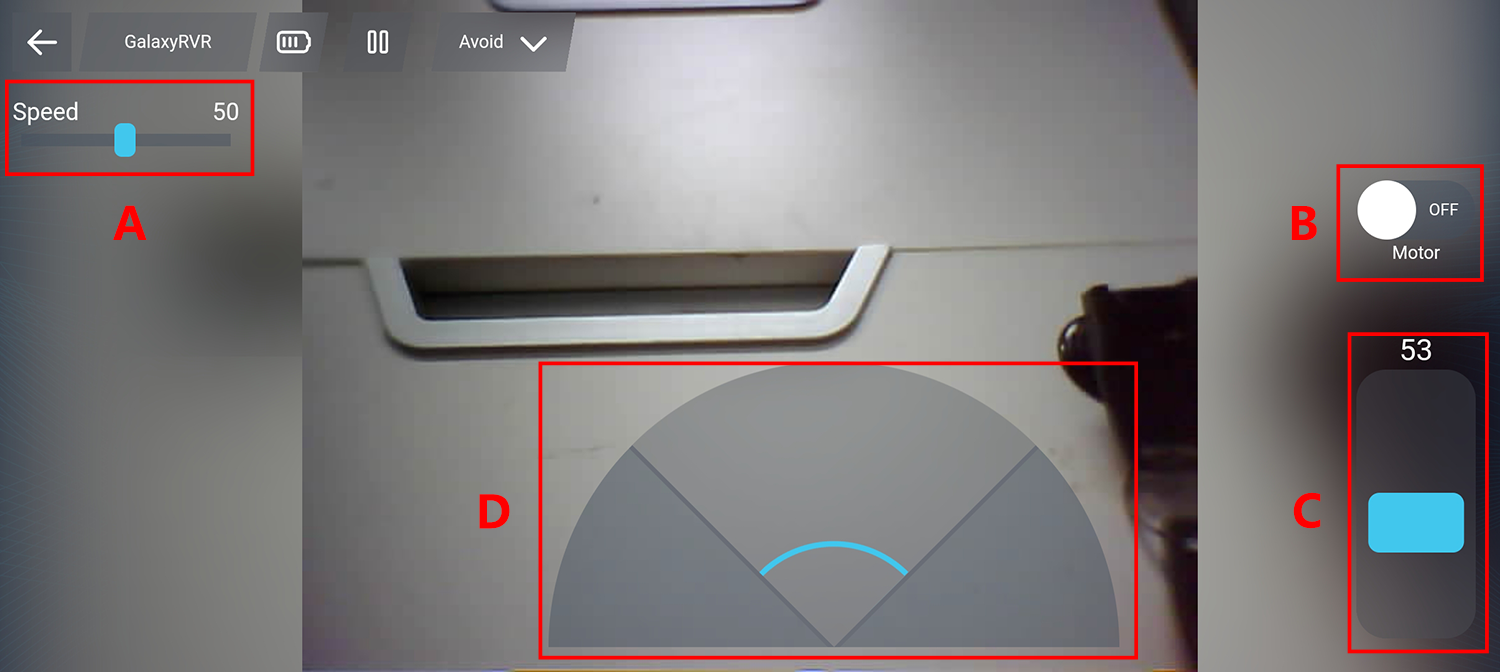
インターフェースコントロール:
速度制御 - GalaxyRVR の移動速度を調整します
モーター制御 - GalaxyRVR の動きを開始または停止します
ジンバル制御 - カメラ角度を 0 ° (空向き)から 130 ° まで調整します
障害物モニター - センサーからの視覚的フィードバック:
左/右セクション:赤外線障害物検出
中央セクション:超音波距離測定
障害物検出範囲の調整
このモードを使用する前に、センサーの検出範囲を環境に合わせて調整してください。工場出荷時の設定は最適ではない場合があります。
短すぎる:ローバーが障害物に衝突する可能性があります
長すぎる:ローバーが不必要にステアリング操作を行う可能性があります
調整手順:
右モジュールから開始
送信機と受信機が正しく位置合わせされていることを確認します
輸送中に曲がった場合はまっすぐにします
感度をテストして調整
障害物を 20cm 離して配置します(ローバーの箱を使用)
インジケーターが点灯するまでポテンショメーターを回します
希望の距離で一貫して作動することを確認します
必要に応じて 2 つ目のポテンショメーターを使用します
左モジュールでも繰り返します
再接続
ネットワークが切断または失敗した場合、このページに移動します。
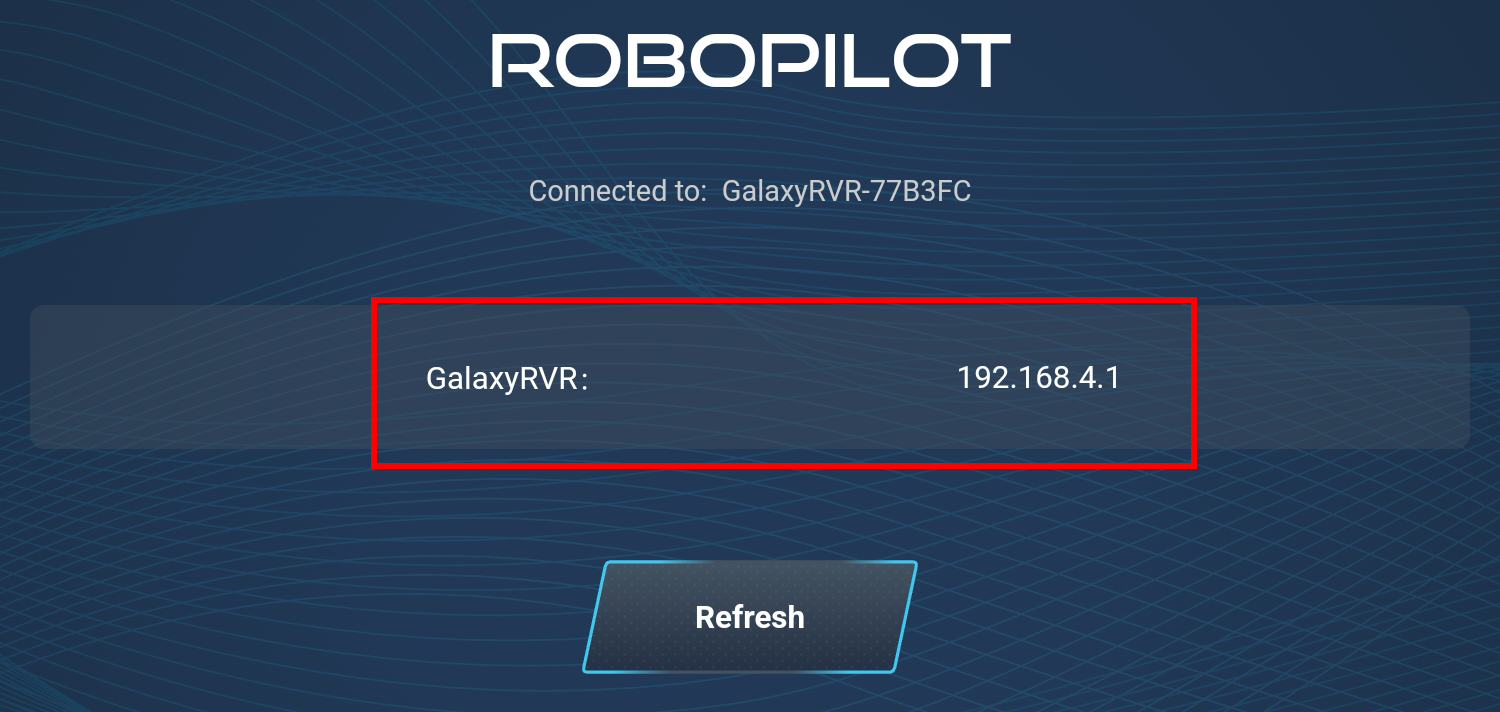
この場合、ネットワーク設定をリセットし、GalaxyRVR に対応する IP をクリックして再接続してください。