Nota
¡Hola, bienvenido a la comunidad de entusiastas de Raspberry Pi, Arduino y ESP32 de SunFounder en Facebook! Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Accede antes a los anuncios de nuevos productos y avances exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones festivas y sorteos: Participa en sorteos y promociones festivas.
👉 ¿Listo para explorar y crear con nosotros? ¡Haz clic en [aquí] y únete hoy!
Juego Rápido con la APP
¿Listo para comenzar tu aventura en Marte? Con la función de inicio rápido de la aplicación RoboPilot, puedes comenzar a explorar tan pronto como tu GalaxyRVR esté ensamblado.
Con RoboPilot, puedes:
Conducir el rover desde una perspectiva en primera persona
Cambiar entre tres modos de control: Remoto, Evitación y Seguimiento
Nota
Si has sobrescrito el firmware y necesitas restaurar la comunicación, sigue 3. Actualizar el Firmware de la Placa R3.
Guía Rápida
Antes de usar el GalaxyRVR por primera vez, carga completamente la batería con el cable USB Tipo-C suministrado. Después de cargar, enciende el dispositivo.
Para iniciar la ESP32 CAM, cambia el modo a Run y presiona el botón Reset en la placa R3. La tira de luz inferior comenzará a parpadear para indicar un inicio exitoso.
Nota
Si la tira de luz inferior muestra una luz parpadeante de cualquier color que no sea verde, tu GalaxyRVR necesita una actualización de firmware. Consulta Actualizar Firmware.
Instala RoboPilot desde APP Store(iOS) o Google Play(Android).
Conecta tu dispositivo móvil a la red WiFi del GalaxyRVR.
El nombre de la red (SSID) es
GalaxyRVRy la contraseña es12345678.Si ves una advertencia que dice «Sin acceso a Internet», elige la opción «Mantener conexión».

Abre RoboPilot. Haz clic en “Go into” para ingresar a la interfaz de control.

Modo Remoto
Al ingresar a la interfaz de control, verás la siguiente pantalla. El fondo muestra la vista capturada por la cámara del GalaxyRVR, con los controles remotos superpuestos.
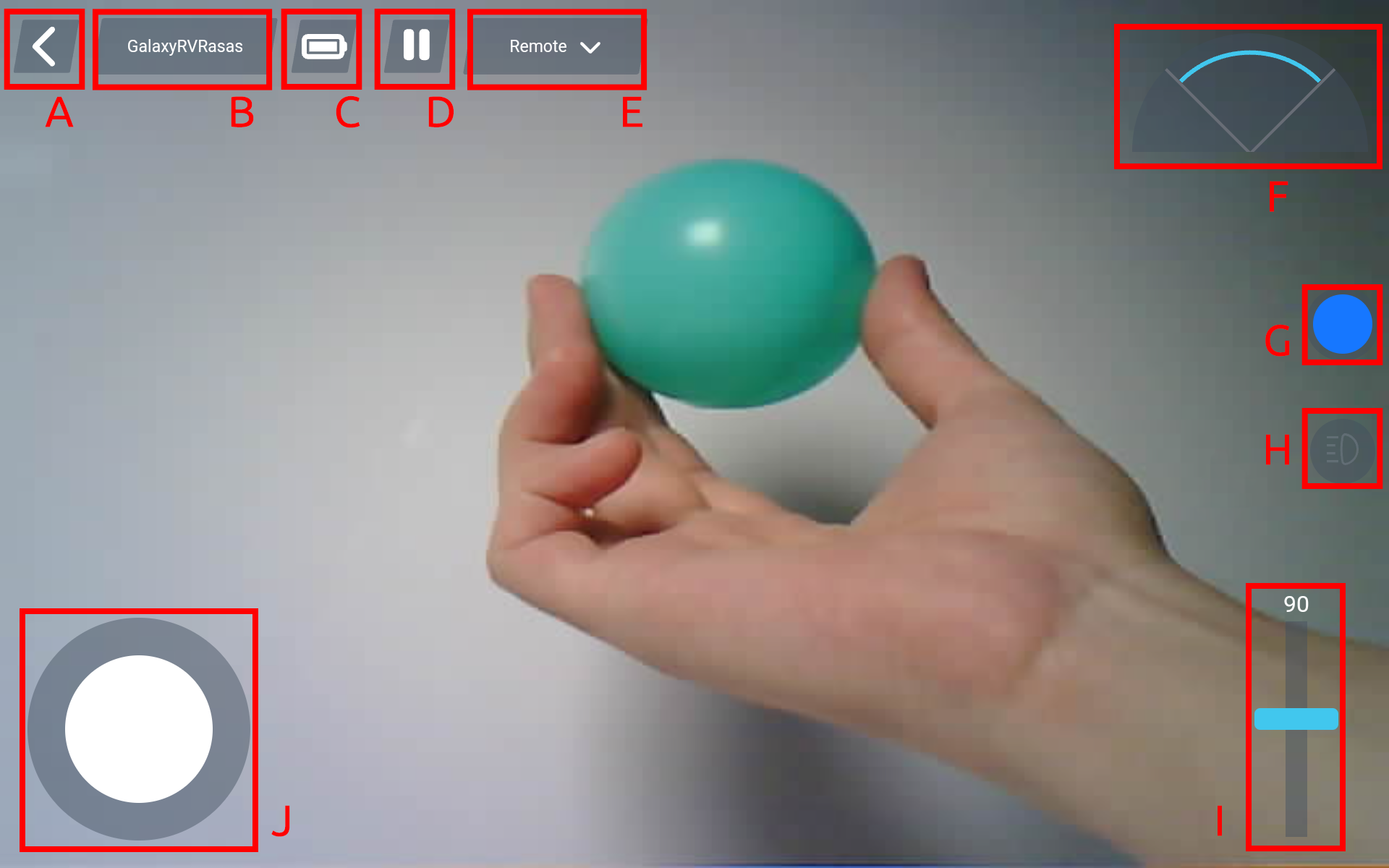
Estos son los controles:
Atrás
Ajustes: Aquí puedes cambiar el nombre y la contraseña del AP (punto de acceso), configurar WiFi, voltear la imagen y desconectar.

Indicador de nivel de batería
Pausar/Ejecutar la APP
Selección de modo: Aquí puedes elegir entre Modo Remoto, Modo Evitación y Modo Seguimiento. La configuración predeterminada es Modo Remoto.

Monitor de obstáculos: Este módulo está dividido en tres áreas, con los lados izquierdo y derecho mostrando los resultados de los módulos de obstáculos, y el área central mostrando las lecturas del sensor ultrasónico.
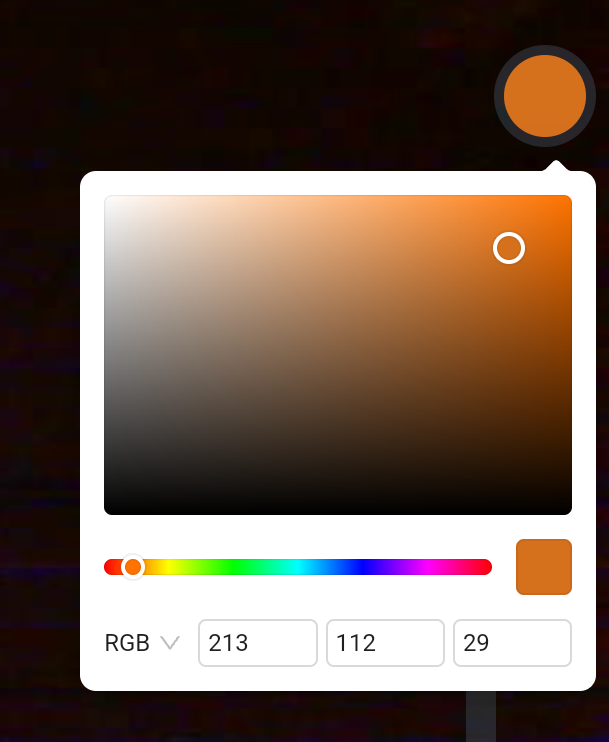
Selector de color: Elige aquí el color de iluminación del chasis.
Interruptor de LED de la cámara.
Ajusta el ángulo del gimbal, de 0 a 130 grados. A 0 grados, apunta hacia el cielo.
Mueve el joystick para controlar el movimiento del GalaxyRVR. Un empuje suave hará que el GalaxyRVR se mueva lentamente.
Modo Evitación y Modo Seguimiento
Modo Evitación: el GalaxyRVR avanzará y evitará obstáculos en su camino.
Modo Seguimiento: el GalaxyRVR se moverá hacia un objeto frente a él o girará a la izquierda o derecha para seguir el movimiento del objeto.
Cuando selecciones Modo Evitación o Modo Seguimiento, verás la siguiente interfaz. La vista en vivo de la cámara del GalaxyRVR forma el fondo, con opciones de control superpuestas.
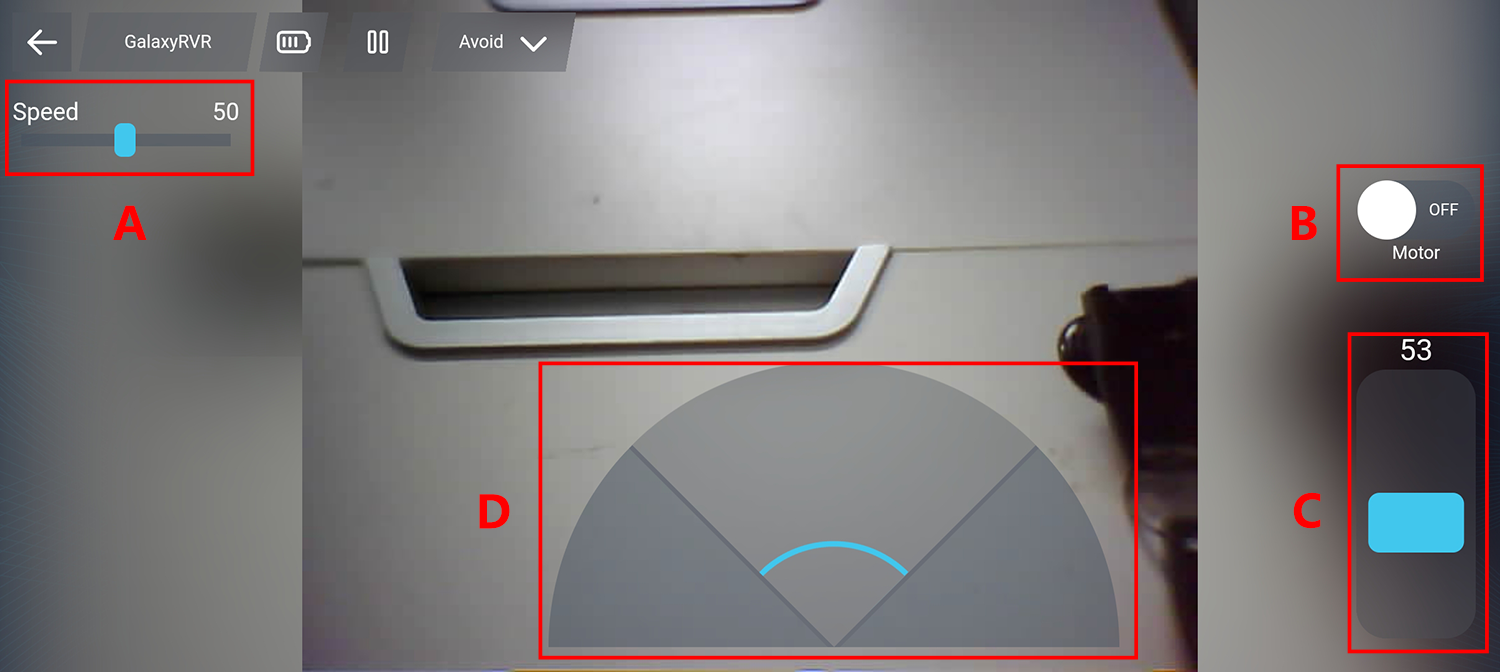
Controles de la interfaz:
Control de velocidad - Ajusta la velocidad de movimiento del GalaxyRVR
Control del motor - Inicia o detiene el movimiento del GalaxyRVR
Control del gimbal - Ajusta el ángulo de la cámara de 0 grados (hacia el cielo) a 130 grados
Monitor de obstáculos - Retroalimentación visual de los sensores:
Secciones izquierda/derecha: Detección de obstáculos por infrarrojos
Sección central: Mediciones de distancia ultrasónicas
Ajuste del rango de detección de obstáculos
Antes de usar este modo, calibra el rango de detección del sensor para adaptarlo a tu entorno. Es posible que la configuración de fábrica no sea la óptima.
Demasiado corto: El rover podría chocar con obstáculos
Demasiado largo: El rover podría girar innecesariamente
Pasos de calibración:
Comienza con el módulo derecho
Asegúrate de que el transmisor/receptor estén correctamente alineados
Enderézalos si se doblaron durante el transporte
Prueba y ajusta la sensibilidad
Coloca un obstáculo a 20 cm de distancia (usa la caja del Rover)
Gira el potenciómetro hasta que el indicador se encienda
Verifica la activación constante a la distancia deseada
Usa el segundo potenciómetro si es necesario
Repite para el módulo izquierdo
Reconectar
Si tu red falla o se desconecta, serás dirigido a esta página.
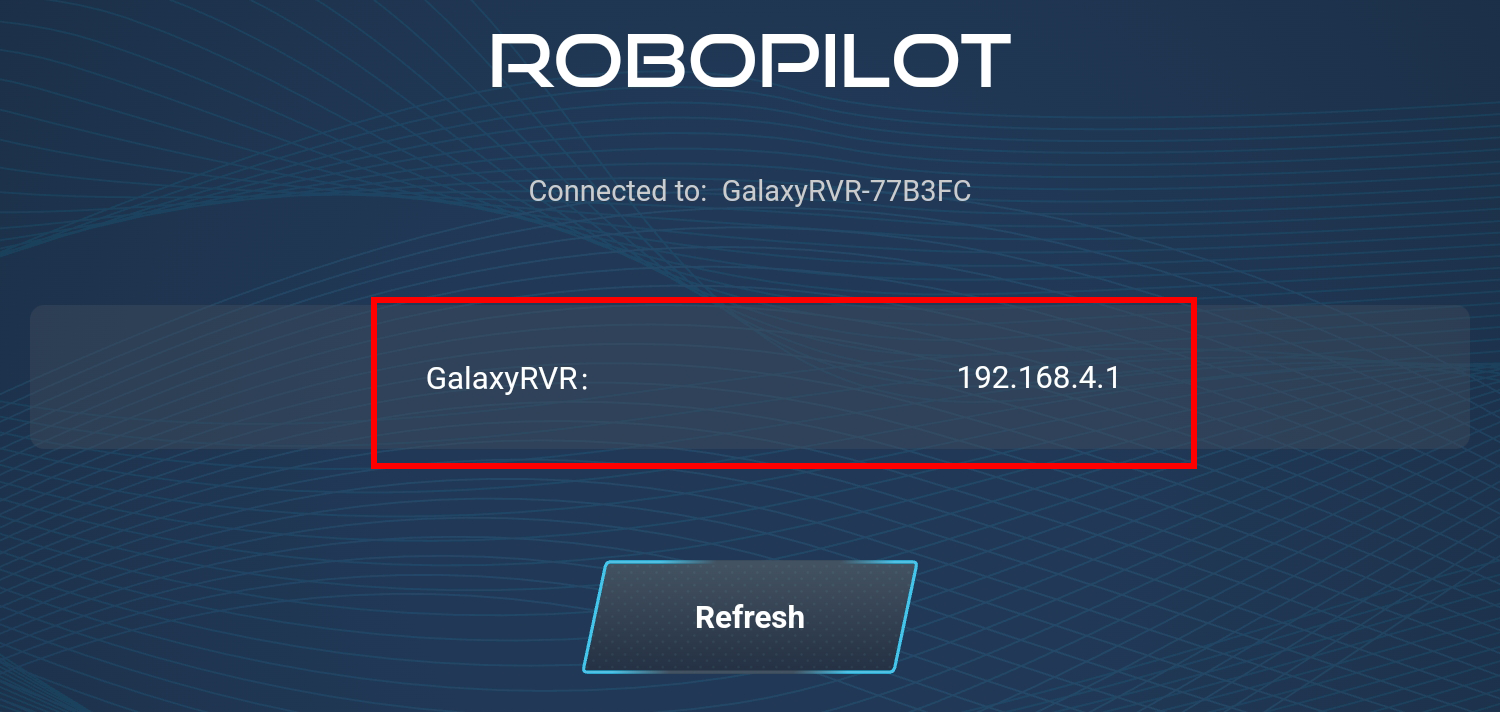
En este punto, restablece la configuración de tu red, luego haz clic en la IP correspondiente a tu GalaxyRVR para reconectar.