Nota
¡Hola, bienvenido a la comunidad de entusiastas de Raspberry Pi, Arduino y ESP32 de SunFounder en Facebook! Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Accede antes a los anuncios de nuevos productos y avances exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones festivas y sorteos: Participa en sorteos y promociones festivas.
👉 ¿Listo para explorar y crear con nosotros? ¡Haz clic en [aquí] y únete hoy!
Juego Rápido con Arduino
En este capítulo, aprenderás a abrir y ejecutar rápidamente códigos de ejemplo específicos de Arduino para que tu GalaxyRVR realice diversas acciones.
Si deseas comprender la lógica del código y los principios de programación detrás de estos ejemplos, consulta el capítulo Programación con Arduino IDE.
Cómo abrir rápidamente un ejemplo de Arduino
En este ejemplo, demostraremos cómo usar el IDE de Arduino para abrir un ejemplo de Arduino.
Enciende el GalaxyRVR.
Cuando uses el GalaxyRVR por primera vez, se recomienda cargar completamente la batería conectando un cable USB Tipo-C. Luego, enciende el interruptor de encendido.
El ESP32-CAM y la placa Arduino comparten los mismos pines RX (recepción) y TX (transmisión). Por lo tanto, antes de cargar el código, primero debes liberar el ESP32-CAM deslizando este interruptor hacia la derecha para evitar conflictos o problemas potenciales.

Conecta tu placa Arduino al ordenador usando un cable USB.
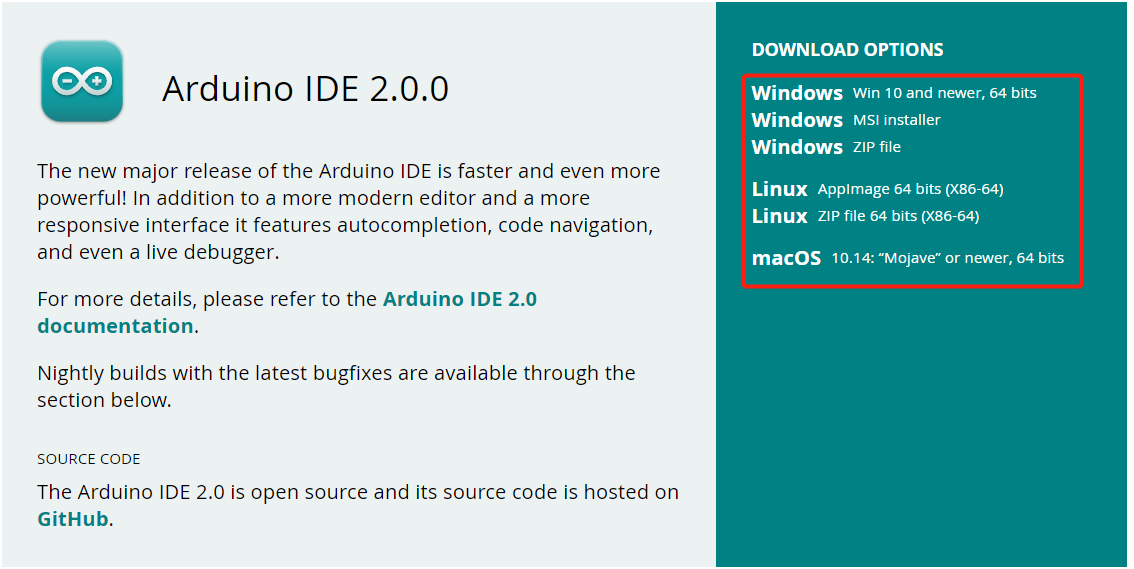
Visita Página de Arduino IDE 2.0.0 y descarga el IDE de Arduino para tu sistema operativo. Sigue las instrucciones de instalación para completar la configuración.
Descarga los códigos de ejemplo desde el siguiente enlace:
Descomprime el archivo descargado y navega a
galaxy-rvr-1.2.x\lesson_codes.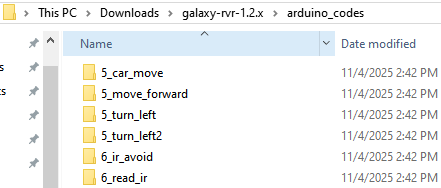
Selecciona una carpeta de código de ejemplo, navega a esa carpeta y haz doble clic en el archivo
.inopara abrirlo en el IDE de Arduino.
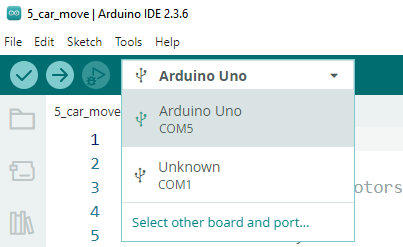
En el IDE de Arduino, selecciona Arduino Uno como placa y elige el puerto adecuado para tu dispositivo.
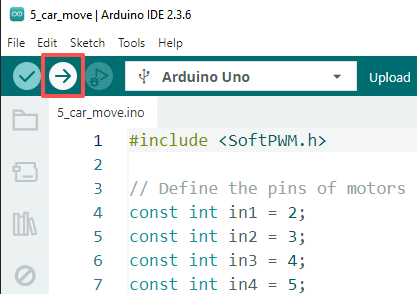
Haz clic en el botón Cargar (flecha que apunta a la derecha) para cargar el código en tu placa.
Nota
Si no estás familiarizado con el IDE de Arduino, consulta lo siguiente:
Ejemplos
5_car_move: El rover avanza, luego retrocede, gira a la izquierda y a la derecha, y finalmente se detiene.6_ir_avoid: El rover evita obstáculos usando sensores infrarrojos.7_ultrasonic_avoid: El rover evita obstáculos usando el módulo ultrasónico.8_ultrasonic_ir_avoid: El rover usa tanto el sensor infrarrojo como el módulo ultrasónico para detectar obstáculos.8_ultrasonic_ir_follow: El rover sigue objetos usando el sensor infrarrojo y el módulo ultrasónico.9_rgb_car_move: Añade indicadores de color para el movimiento: verde para avanzar, rojo para retroceder y amarillo para girar a la izquierda o a la derecha.10_servo_range: El cardán de la cámara gira de 0° a 180° usando un bucle for, y el ángulo actual se muestra en el Monitor Serie.11_camera_view: Ve la transmisión de video en vivo desde la cámara del rover en un navegador web. Se requiere la librería SunFounder AI Camera.13_read_battery: Monitorea el voltaje de la batería a través del código.