Nota
¡Hola, bienvenido a la comunidad de entusiastas de Raspberry Pi, Arduino y ESP32 de SunFounder en Facebook! Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Accede antes a los anuncios de nuevos productos y avances exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones festivas y sorteos: Participa en sorteos y promociones festivas.
👉 ¿Listo para explorar y crear con nosotros? ¡Haz clic en [aquí] y únete hoy!
Juego Rápido con Scratch
En este capítulo, aprenderá a abrir y ejecutar rápidamente proyectos de ejemplo en Scratch (Mammoth Coding) para ver su GalaxyRVR en acción.
Si desea aprender a crear estos scripts desde cero, consulte el capítulo Programación con Scratch.
Nota
La placa R3 del GalaxyRVR viene con un firmware compatible con la aplicación RoboPilot y Mammoth Coding.
Si ha sobrescrito el firmware y necesita restaurar la comunicación, siga las instrucciones de 3. Actualizar el Firmware de la Placa R3.
Cómo abrir rápidamente un ejemplo de Scratch
Descargue los códigos de ejemplo desde el siguiente enlace:
Extraiga el archivo descargado y transfiera la carpeta
scratch_codesa su dispositivo móvil. Puede usar cualquier herramienta de transferencia de archivos, como ES File Explorer o File Transfer Assistant.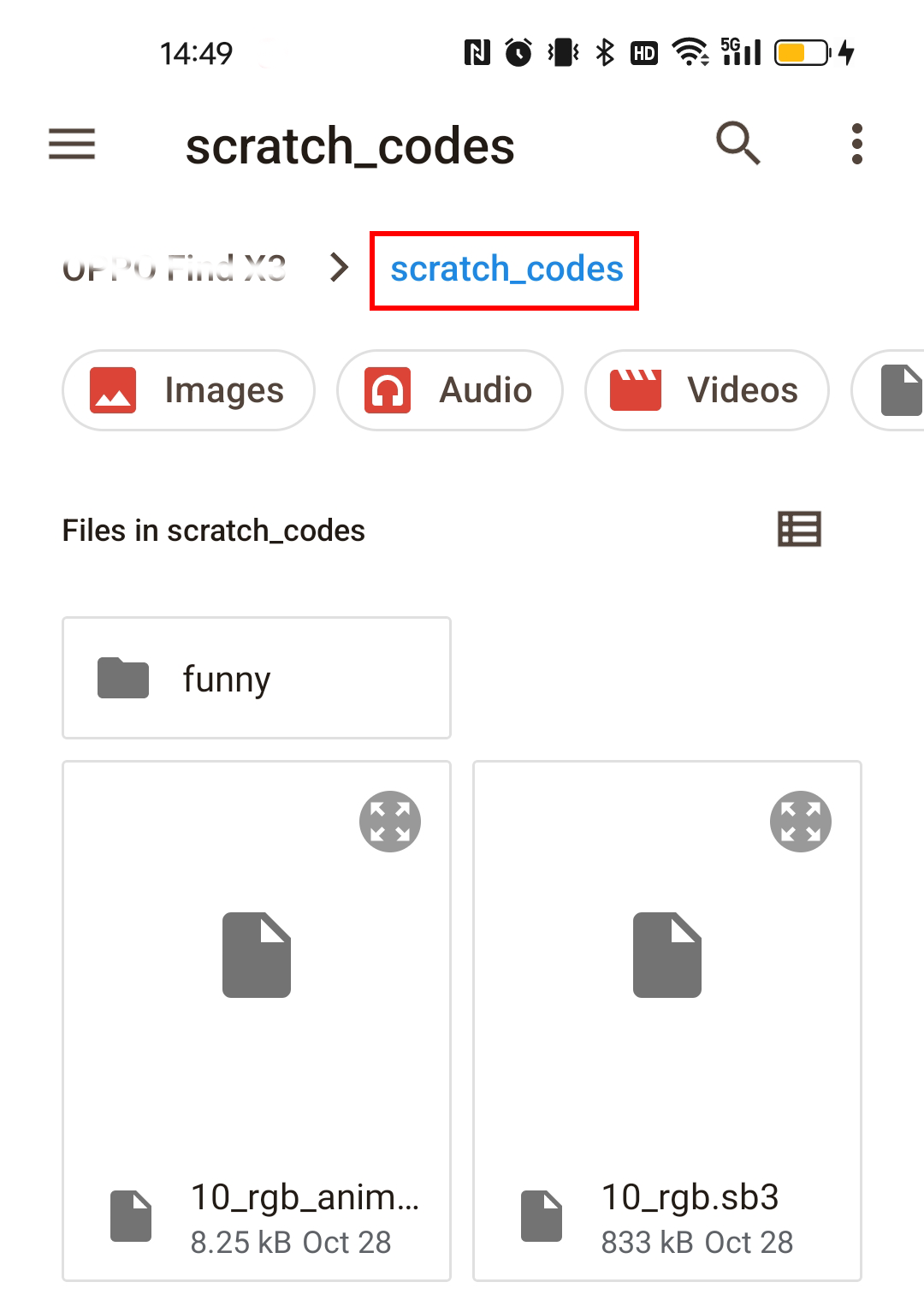
Busque Mammoth Coding en Google Play o en la Apple App Store e instálelo.
Antes de usar el GalaxyRVR por primera vez, cargue completamente la batería con el cable USB tipo C suministrado. Después de cargarla, encienda el robot.
Para iniciar el ESP32 CAM, cambie el modo a Run y presione el botón Reset en la placa R3. La tira de luces inferior comenzará a parpadear para indicar un inicio exitoso.
Nota
Si la tira de luces inferior muestra una luz parpadeante de cualquier color que no sea verde, su GalaxyRVR necesita una actualización de firmware. Consulte Actualizar Firmware.
Conecte su dispositivo móvil a la red WiFi del GalaxyRVR.
El nombre de la red (SSID) es
GalaxyRVRy la contraseña es12345678.Si aparece una advertencia que indica «Sin acceso a Internet», seleccione la opción «Mantener conexión».

En la aplicación, toque File > Open from device para explorar los archivos locales.
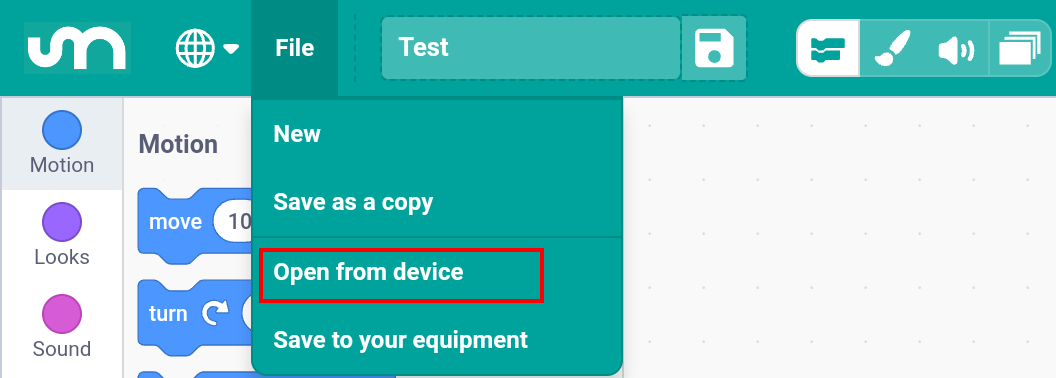
Seleccione un archivo
.sb3para abrirlo.
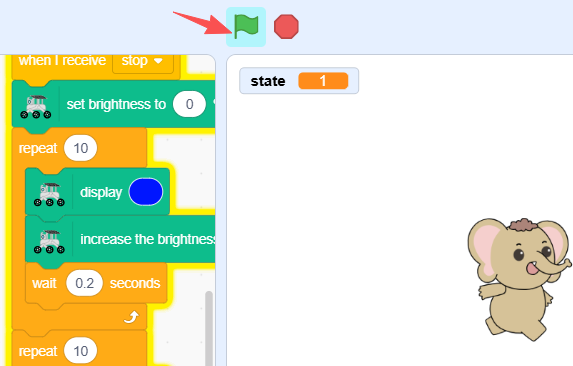
Toque el icono de la bandera verde para iniciar el script.
Ejemplos
Proyectos básicos
Estos proyectos son los cursos básicos para controlar el GalaxyRVR con Mammoth Coding. Le guiarán paso a paso sobre cómo utilizar el GalaxyRVR.
3_move.sb3: Controle el movimiento de su GalaxyRVR en tiempo real usando las teclas de dirección.4_ultrasonic.sb3: El rover avanza y evita obstáculos automáticamente usando el módulo ultrasónico.5_ultra_animate_jump.sb3: Crea una escena animada del rover moviéndose alegremente por la superficie marciana.6_ir_obstacle_avoid.sb3: El rover avanza y evita obstáculos usando sensores IR.7_ir_obstacle_avoid_animate.sb3: Controle el sprite del rover para esquivar rocas en la superficie marciana activando los sensores IR con las manos.8_ir_ultrasonic_avoid.sb3: El rover usa sensores ultrasónicos e IR juntos para navegar suavemente alrededor de obstáculos.9_ir_ultrasonic_follow.sb3: El rover le sigue: se acerca cuando se pone frente a él, gira hacia usted cuando está a un lado y se detiene cuando se aleja.10_rgb.sb3: Toque una bola de color para que las luces RGB del rover brillen en ese color.10_rgb_animate.sb3: El rover se mueve y cambia el color de la luz según las teclas de dirección que se presionen.1scratch_servo.sb3: Use las teclas de flecha para ajustar el ángulo de la cámara del rover; haga clic para restablecer su posición.1scratch_servo_stage.sb3: Toque y arrastre la flecha en pantalla para dirigir la cámara del rover con una respuesta suave y en tiempo real.12_camera.sb3: Vea la transmisión en vivo de la cámara desde la perspectiva del rover mientras explora.13_realtime_control.sb3: Controle los movimientos y las luces de su rover en tiempo real a través de Scratch.
Proyectos divertidos
Estos divertidos proyectos de Scratch no requieren el GalaxyRVR.
Puede encontrarlos todos en la carpeta scratch_codes/fun/.
1_scratch_balloon.sb3: Infle el globo bloqueando el sensor IR izquierdo; no deje que explote ni se caiga.2_flappy_parrot.sb3: Controle el vuelo del loro usando su mano sobre el sensor ultrasónico para esquivar postes de bambú.3_shooting.sb3: Apunte y dispare a los objetivos usando el módulo de evasión de obstáculos.4_eat_apple.sb3: Guíe al escarabajo hacia la manzana usando gestos de la mano detectados por el sensor IR izquierdo.5_fishing.sb3: Atrape peces bloqueando el sensor IR izquierdo en el momento adecuado.6_sensitive_ball.sb3: Mueva la bola hacia arriba o hacia abajo con la mano sobre el sensor ultrasónico; active sonidos y luces cuando toque una línea.7_tap_white_tile.sb3: Toque las fichas negras usando dos sensores IR para sumar puntos; evite las blancas.