Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
Schnellstart mit der App
Bereit für Ihr Mars-Abenteuer? Mit der Schnellstart-Funktion der RoboPilot-App können Sie sofort loslegen, sobald Ihr GalaxyRVR zusammengebaut ist.
Mit RoboPilot können Sie:
Den Rover aus der Ego-Perspektive steuern
Zwischen drei Steuerungsmodi wechseln: Fernsteuerung, Ausweichen und Folgen
Bemerkung
Falls Sie die Firmware überschrieben haben und die Kommunikation wiederherstellen müssen, folgen Sie der Anleitung unter 3. Aktualisieren der R3-Board-Firmware.
Kurzanleitung
Starten Sie den GalaxyRVR.
Laden Sie den Akku vor der ersten Verwendung des GalaxyRVR mit dem mitgelieferten Typ-C-USB-Kabel vollständig auf.
Schalten Sie den Netzschalter ein.
Stellen Sie den Modus auf Run und drücken Sie die Reset-Taste auf dem R3-Board.
Der untere Lichtstreifen blinkt grün und zeigt damit einen erfolgreichen Start an.
Installieren Sie RoboPilot aus dem APP Store (iOS) oder Google Play (Android).
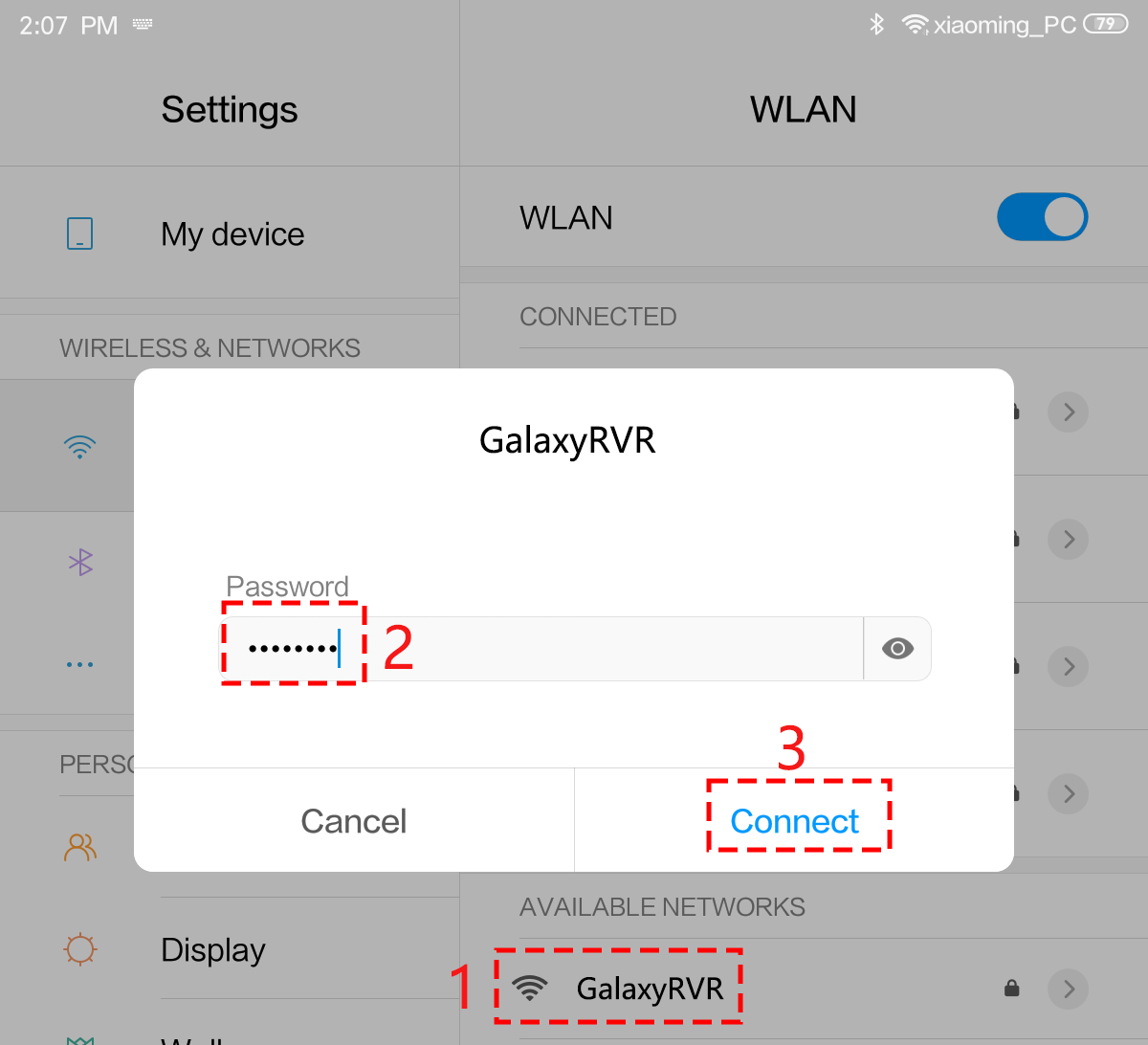
Verbinden Sie Ihr Mobilgerät mit dem WLAN-Netzwerk des GalaxyRVR.
Der Netzwerkname (SSID) lautet
GalaxyRVRund das Passwort ist12345678.Wenn eine Warnung mit dem Hinweis „Kein Internetzugriff“ erscheint, wählen Sie bitte die Option „Trotzdem verbinden“.
Öffnen Sie RoboPilot. Tippen Sie auf ‚Go into‘, um die Steuerungsoberfläche zu öffnen.

Fernsteuerungsmodus
Nachdem Sie die Steuerungsoberfläche betreten haben, sehen Sie den folgenden Bildschirm. Der Hintergrund zeigt die Ansicht der GalaxyRVR-Kamera, überlagert mit den Fernsteuerungs-Widgets.
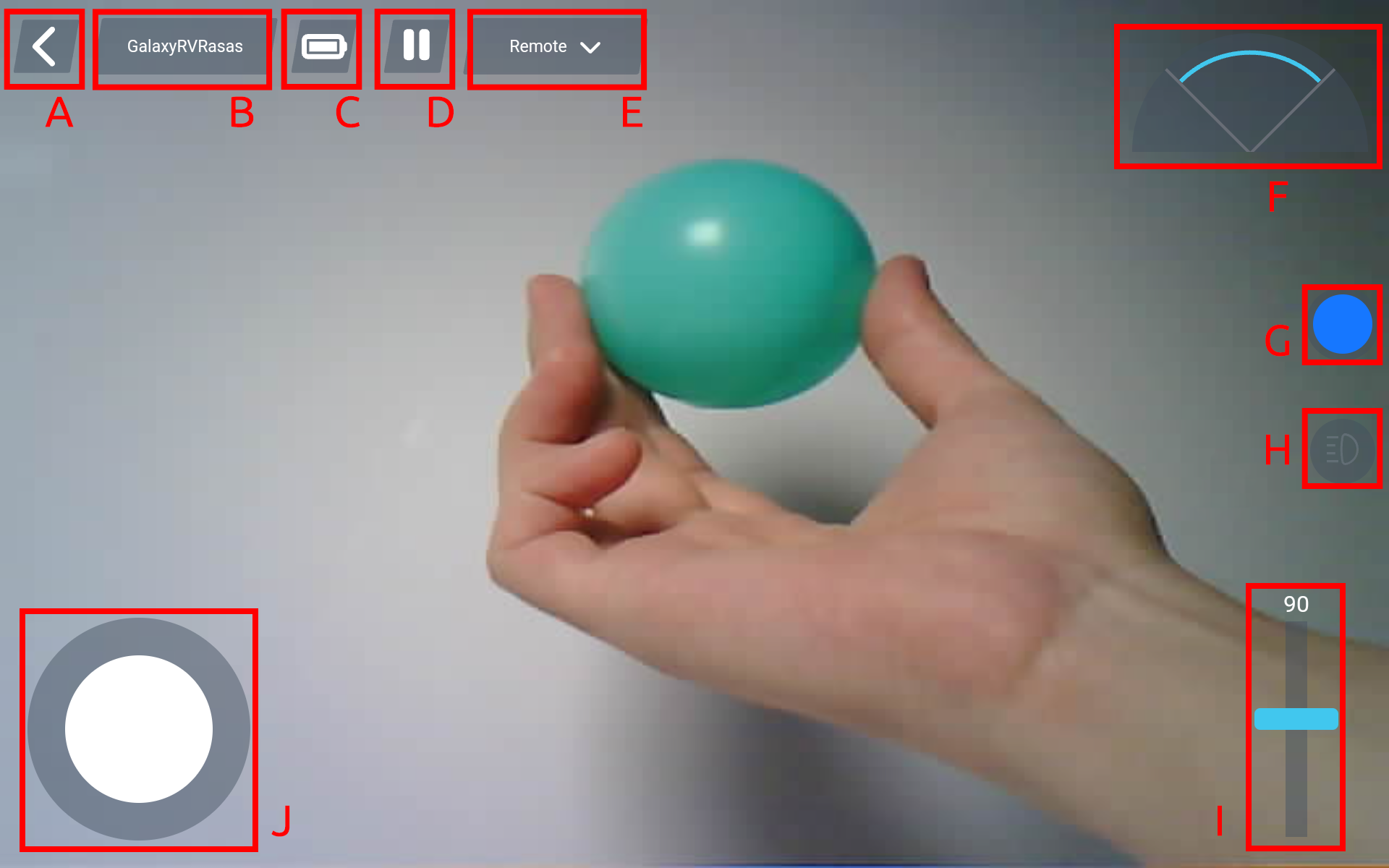
Hier sind die Steuerelemente:
Zurück
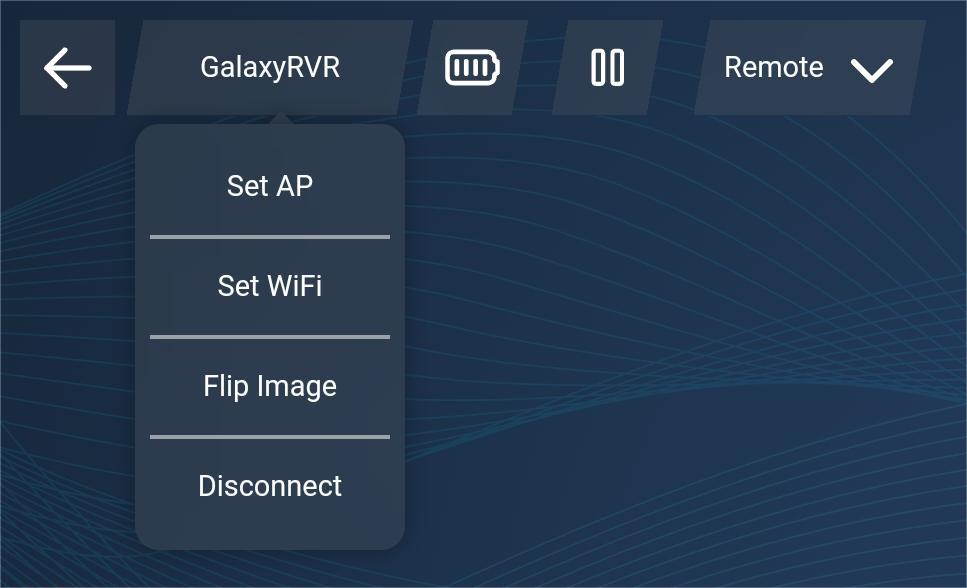
Einstellungen: Hier können Sie den Namen und das Passwort des AP (Hotspots) ändern, WLAN einrichten, das Bild spiegeln und die Verbindung trennen.
Akkuladestandsanzeige
App pausieren/starten
Modusauswahl: Hier können Sie zwischen Fernsteuerungsmodus, Ausweichmodus und Folgemodus wählen. Die Standardeinstellung ist der Fernsteuerungsmodus.

Hindernisüberwachung: Dieses Modul ist in drei Bereiche unterteilt. Die linke und rechte Seite zeigen die Ergebnisse der Hindernismodule, der mittlere Bereich zeigt die Messwerte des Ultraschallsensors.
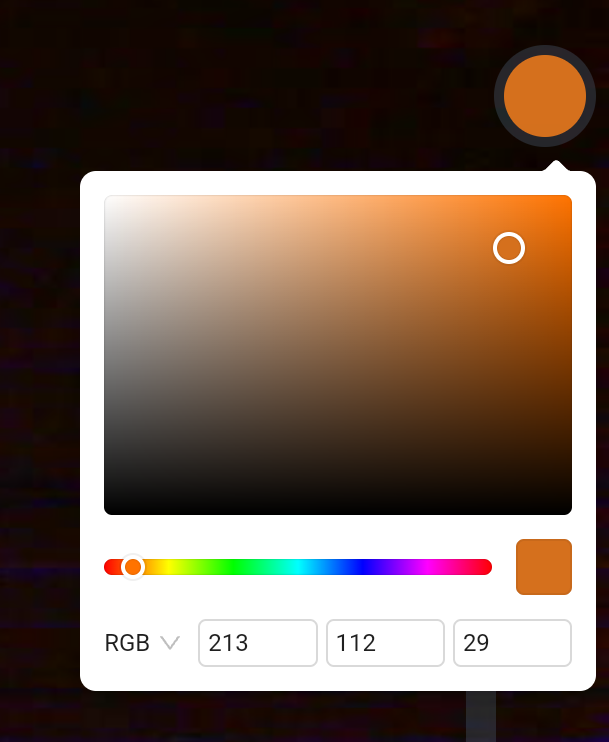
Farbauswahl: Wählen Sie hier die Beleuchtungsfarbe für das Chassis.
Kamera-LED-Schalter.
Stellen Sie den Neigungswinkel der Kameraplattform ein, Bereich 0–130°. Bei 0° zeigt die Kamera nach oben zum Himmel.
Bewegen Sie den Joystick, um die Bewegung des GalaxyRVR zu steuern. Ein sanfter Druck lässt den GalaxyRVR langsam fahren.
Ausweichmodus und Folgemodus
Ausweichmodus: Der GalaxyRVR fährt vorwärts und weicht Hindernissen auf seinem Weg aus.
Folgemodus: Der GalaxyRVR bewegt sich auf ein Objekt vor ihm zu oder dreht sich nach links oder rechts, um der Bewegung des Objekts zu folgen.
Wenn Sie den Ausweichmodus oder den Folgemodus auswählen, sehen Sie die folgende Oberfläche. Das Live-Kamerabild des GalaxyRVR bildet den Hintergrund, mit darüberliegenden Steuerungsoptionen.
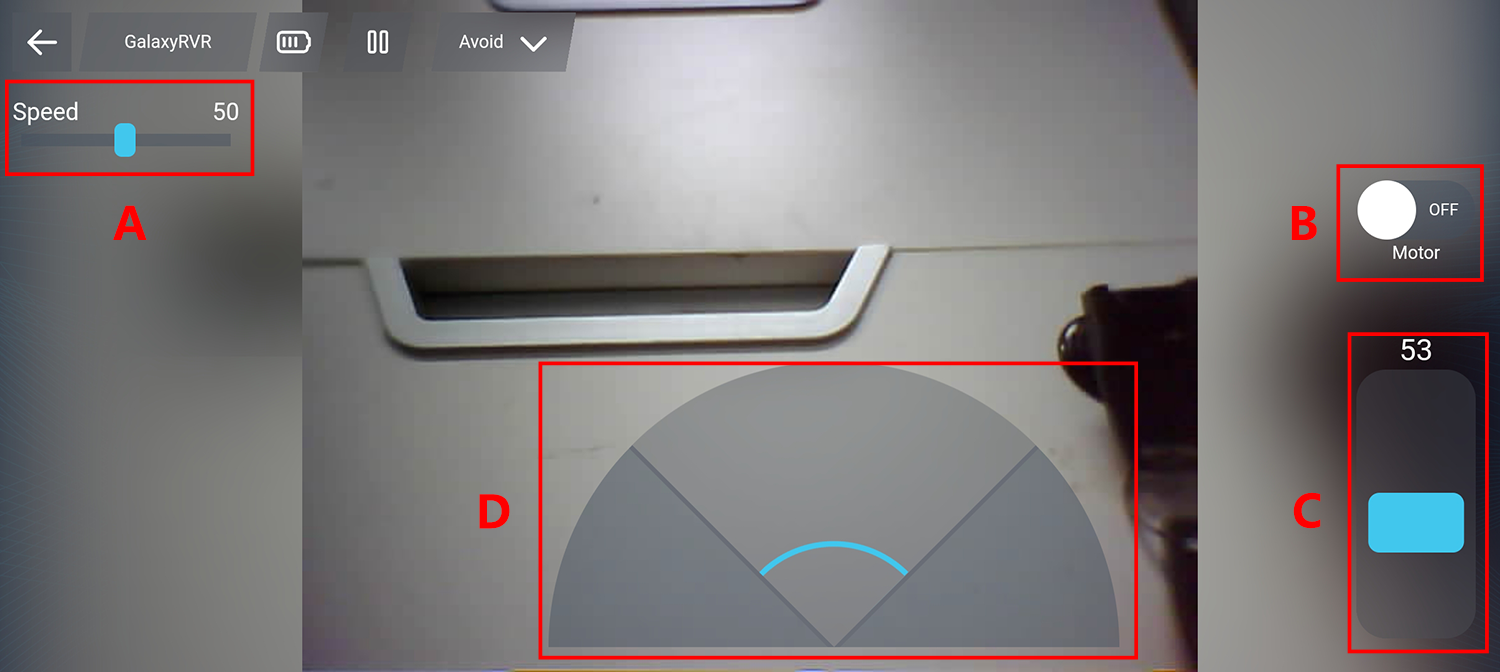
Oberflächensteuerungen:
Geschwindigkeitsregelung – Passen Sie die Bewegungsgeschwindigkeit des GalaxyRVR an
Motorsteuerung – Starten oder Stoppen der Bewegung des GalaxyRVR
Plattformsteuerung – Passen Sie den Kamerawinkel von 0° (zum Himmel gerichtet) bis 130° an
Hindernisüberwachung – Visuelles Feedback von den Sensoren:
Linker/rechter Bereich: Infrarot-Hinderniserkennung
Mittlerer Bereich: Ultraschall-Entfernungsmessungen
Einstellen des Hinderniserkennungsbereichs
Kalibrieren Sie vor der Verwendung dieses Modus den Sensorerkennungsbereich an Ihre Umgebung. Die Werkseinstellungen sind möglicherweise nicht optimal.
Zu kurz: Der Rover könnte Hindernisse rammen
Zu lang: Der Rover könnte unnötig ausweichen
Kalibrierungsschritte:
Beginnen Sie mit dem rechten Modul
Stellen Sie sicher, dass Sender und Empfänger richtig ausgerichtet sind
Richten Sie sie gerade, wenn sie während des Transports verbogen wurden
Testen und justieren Sie die Empfindlichkeit
Platzieren Sie ein Hindernis in 20 cm Entfernung (verwenden Sie die Rover-Box)
Drehen Sie das Potentiometer, bis die Anzeige-LED aufleuchtet
Überprüfen Sie die zuverlässige Auslösung in der gewünschten Entfernung
Verwenden Sie bei Bedarf das zweite Potentiometer
Wiederholen Sie den Vorgang für das linke Modul
Erneute Verbindung
Wenn Ihre Netzwerkverbindung fehlschlägt oder getrennt wird, werden Sie zu dieser Seite weitergeleitet.
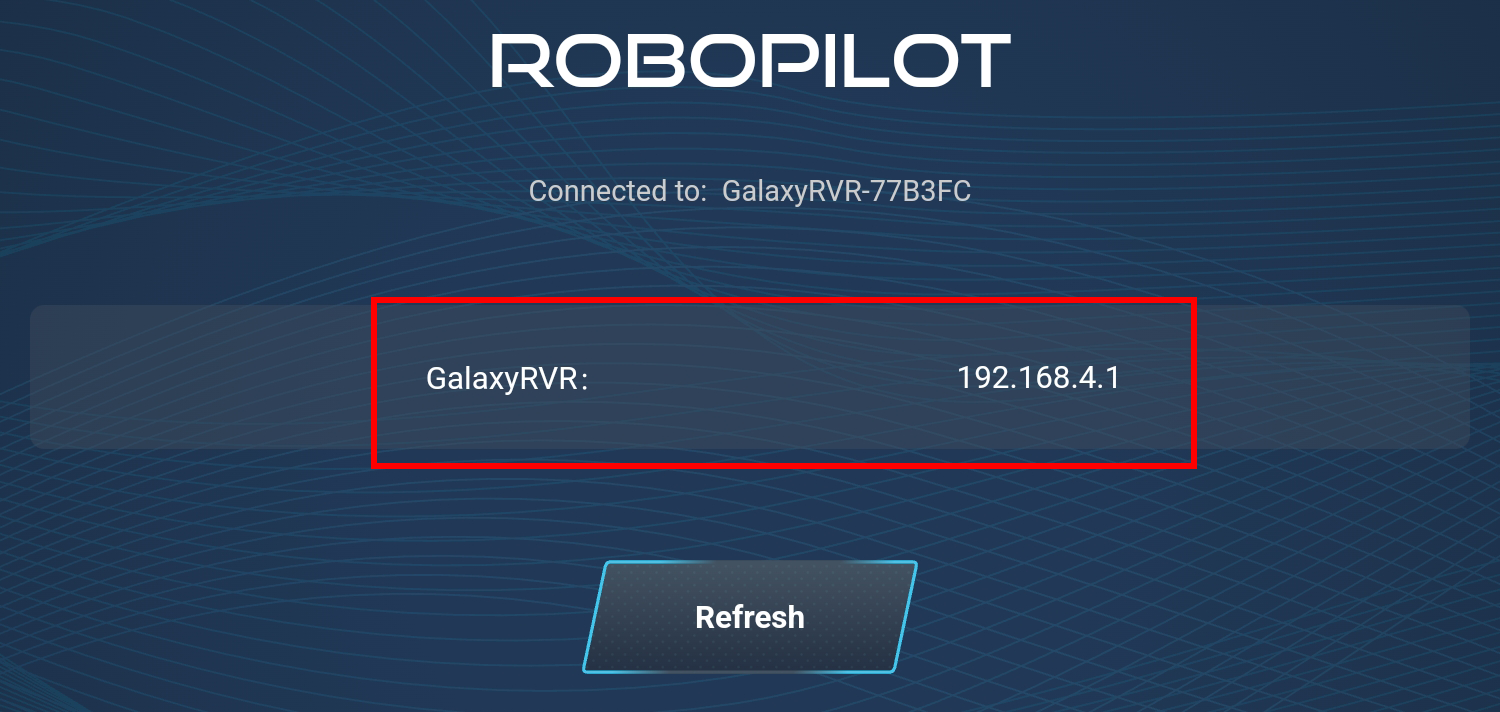
Setzen Sie in diesem Fall Ihre Netzwerkeinstellungen zurück und klicken Sie dann auf die IP-Adresse, die Ihrem GalaxyRVR entspricht, um die Verbindung wiederherzustellen.