注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
1.3.2 サーボモータ
はじめに
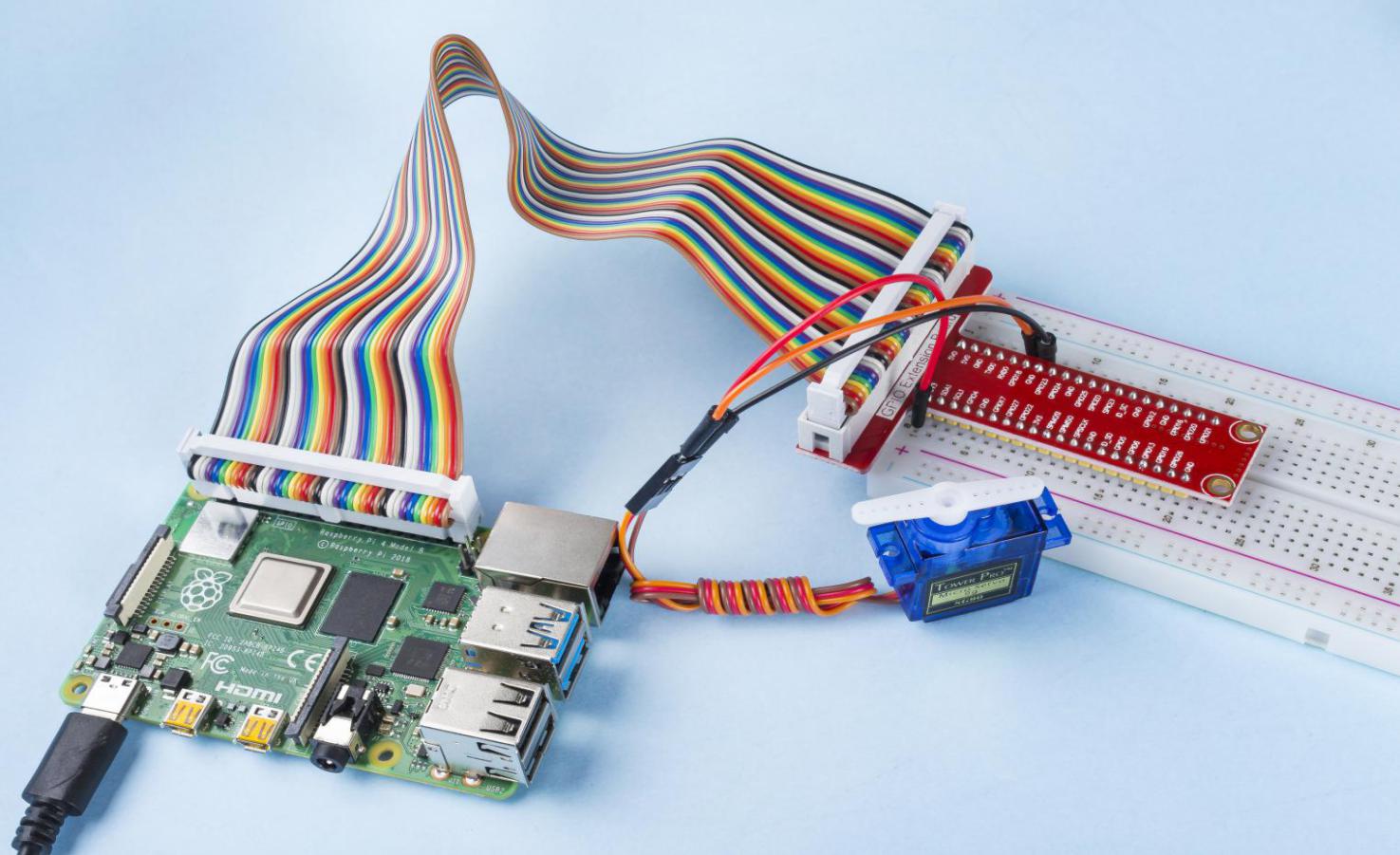
このプロジェクトでは、サーボモータを回転させる方法を学びます。
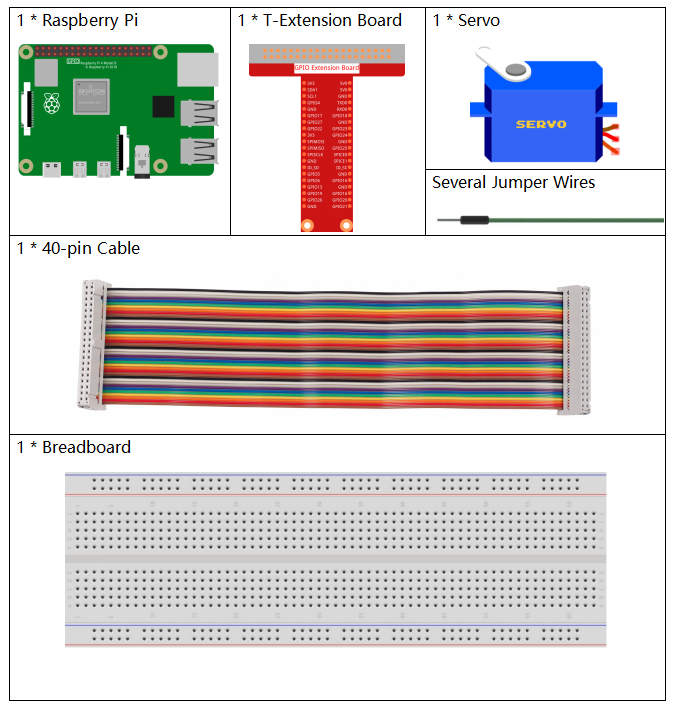
必要な部品
このプロジェクトには、以下の部品が必要です。
一式をまとめて購入すると便利です。リンクはこちら:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
Raphael Kit |
337 |
以下のリンクから個々に購入することも可能です。
コンポーネントの紹介 |
購入リンク |
|---|---|
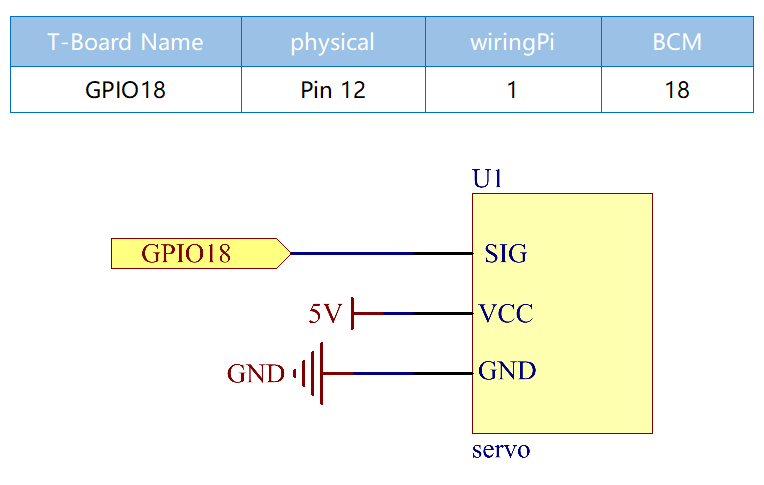
回路図
実験手順
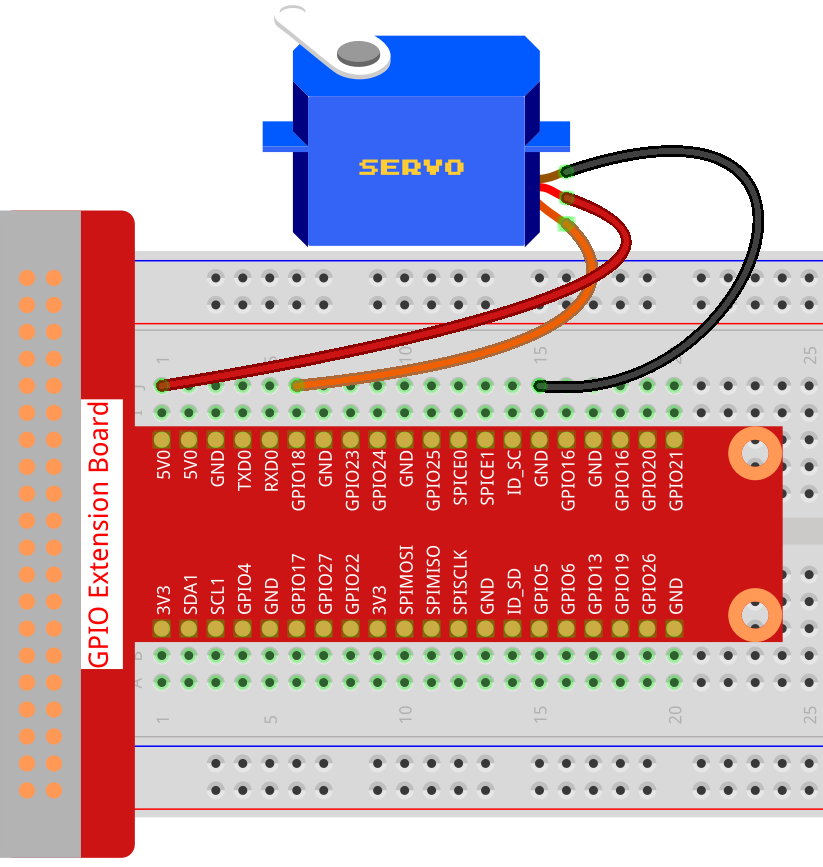
ステップ1: 回路を組み立てます。
ステップ2: コードのフォルダに移動します。
cd ~/raphael-kit/python/
ステップ3: 実行可能ファイルを起動します。
sudo python3 1.3.2_Servo.py
プログラムが実行された後、サーボモータは0度から180度、次に180度から0度へと循環して回転します。
コードについて
注釈
下記のコードは 変更/リセット/コピー/実行/停止 が可能です。ただし、その前に raphael-kit/python のようなソースコードのパスに移動する必要があります。コードを変更した後、そのまま実行して効果を確認できます。
import RPi.GPIO as GPIO
import time
SERVO_MIN_PULSE = 500
SERVO_MAX_PULSE = 2500
ServoPin = 18
def map(value, inMin, inMax, outMin, outMax):
return (outMax - outMin) * (value - inMin) / (inMax - inMin) + outMin
def setup():
global p
GPIO.setmode(GPIO.BCM) # Numbers GPIOs by BCM
GPIO.setup(ServoPin, GPIO.OUT) # Set ServoPin's mode is output
GPIO.output(ServoPin, GPIO.LOW) # Set ServoPin to low
p = GPIO.PWM(ServoPin, 50) # set Frequecy to 50Hz
p.start(0) # Duty Cycle = 0
def setAngle(angle): # make the servo rotate to specific angle (0-180 degrees)
angle = max(0, min(180, angle))
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)#map the angle to duty cycle and output it
def loop():
while True:
for i in range(0, 181, 5): #make servo rotate from 0 to 180 deg
setAngle(i) # Write to servo
time.sleep(0.002)
time.sleep(1)
for i in range(180, -1, -5): #make servo rotate from 180 to 0 deg
setAngle(i)
time.sleep(0.001)
time.sleep(1)
def destroy():
p.stop()
GPIO.cleanup()
if __name__ == '__main__': #Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the program destroy() will be executed.
destroy()
コードの説明
p = GPIO.PWM(ServoPin, 50) # set Frequecy to 50Hz
p.start(0) # Duty Cycle = 0
ServoPinをPWMピンとして設定し、周波数を50Hz、周期を20msに設定します。
p.start(0): PWM機能を実行し、初期値を0に設定します。
def setAngle(angle): # make the servo rotate to specific angle (0-180 degrees)
angle = max(0, min(180, angle))
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)#map the angle to duty cycle and output it
setAngle()という関数を作成し、0から180までの角度をサーボに書き込みます。
angle = max(0, min(180, angle))
このコードは、角度を0-180°の範囲内に制限するために使用されます。
min()関数は入力値の最小値を返します。 もしangleが180より大きい場合、180を返します。そうでなければ、angleを返します。
max()関数は反復可能なオブジェクト内での最大要素、または二つ以上のパラメータの最大値を返します。 もしangleが0より小さい場合、0を返します。そうでなければ、angleを返します。
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)
サーボに0〜180°の範囲を描画するため、サーボのパルス幅を0.5ms(500us)〜2.5ms(2500us)に設定します。
PWMの周期は20ms(20000us)であるため、PWMのデューティサイクルは (500/20000)%〜(2500/20000)%であり、0〜180の範囲は2.5〜12.5にマッピングされます。
現象の画像