注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
1.3.2 サーボ
はじめに
このプロジェクトでは、サーボを回転させる方法を学びます。
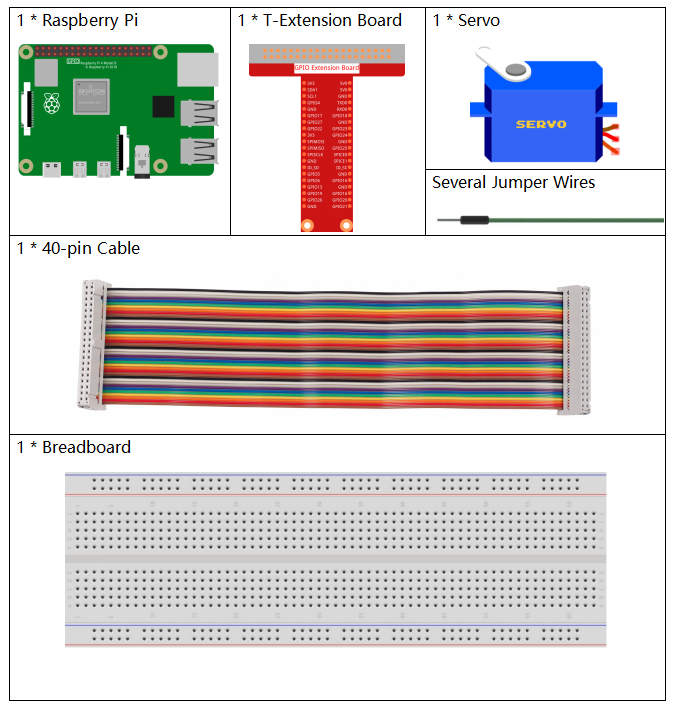
必要な部品
このプロジェクトでは、以下の部品が必要です。
一式を購入するのは確かに便利です。以下にリンクを示します。
名前 |
このキットのアイテム |
リンク |
|---|---|---|
Raphael Kit |
337 |
以下のリンクから、個別に購入することも可能です。
コンポーネントの紹介 |
購入リンク |
|---|---|
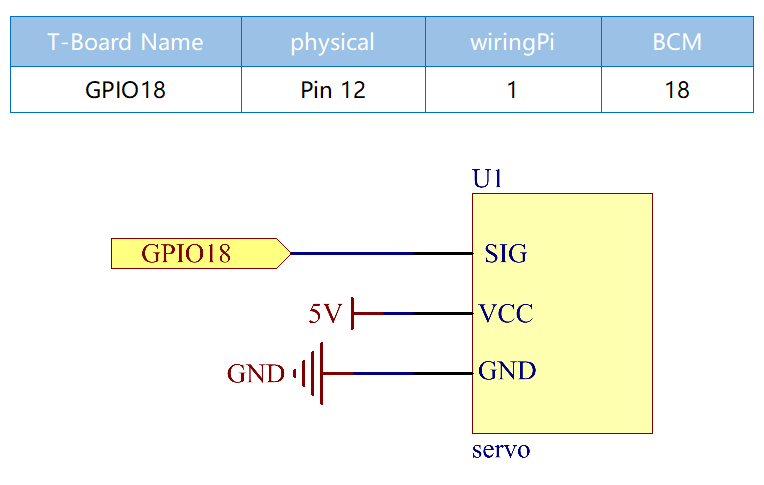
回路図
実験の手順
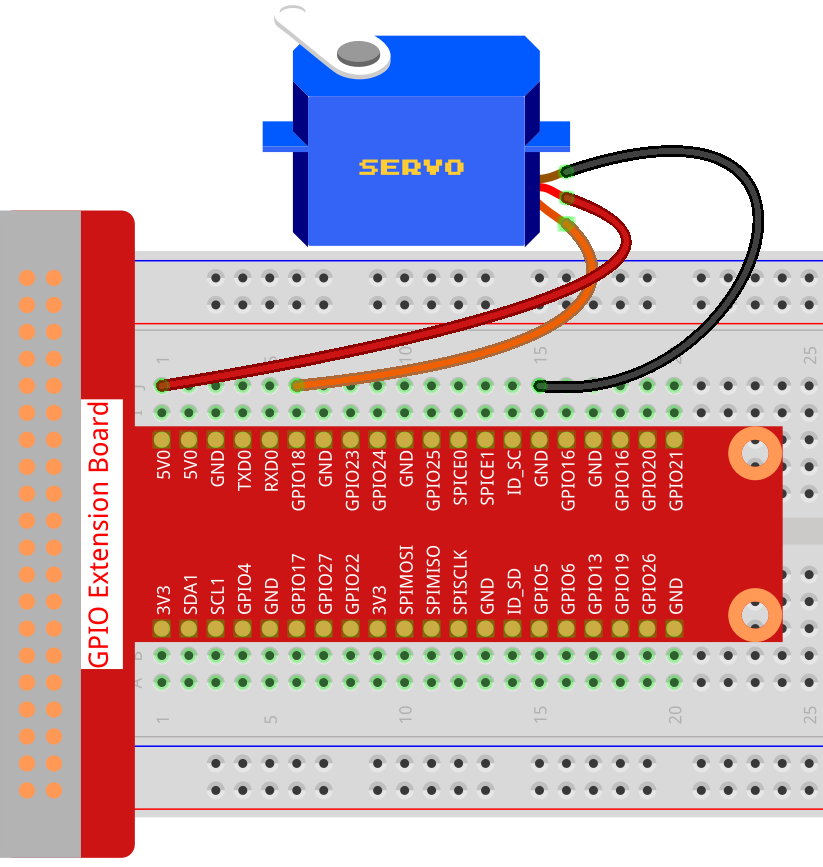
ステップ1: 回路を組み立てる。
ステップ2: コードのフォルダに移動する。
cd ~/raphael-kit/nodejs/
ステップ3: コードを実行する。
sudo node servo.js
プログラムが実行された後、サーボは0度から180度まで回転し、その後180度から0度まで回転します。これが繰り返されます。
コード
const Gpio = require('pigpio').Gpio;
SERVO_MIN_ANGLE = 0
SERVO_MAX_ANGLE = 180
SERVO_MIN_PULSE = 500
SERVO_MAX_PULSE = 2500
ServoPin = new Gpio(18,{mode: Gpio.OUTPUT})
function map(value, inMin, inMax, outMin, outMax){
return (outMax - outMin) * (value - inMin) / (inMax - inMin) + outMin
}
function angle2pulse(angle){
return Math.floor(map(angle,SERVO_MIN_ANGLE,SERVO_MAX_ANGLE,SERVO_MIN_PULSE ,SERVO_MAX_PULSE))
}
let angle=90;
let step=5;
setInterval(() => {
if(angle>=180||angle<=0){
step=-step
}
angle+=step;
ServoPin.servoWrite(angle2pulse(angle));
}, 20);
コード説明
const Gpio = require('pigpio').Gpio;
ServoPin = new Gpio(18,{mode: Gpio.OUTPUT})
pigpioモジュールをインポートし、Gpio18の出力を制御するためのGpioクラスのオブジェクト、ServoPinを作成します。
SERVO_MIN_ANGLE = 0
SERVO_MAX_ANGLE = 180
SERVO_MIN_PULSE = 500
SERVO_MAX_PULSE = 2500
function map(value, inMin, inMax, outMin, outMax){
return (outMax - outMin) * (value - inMin) / (inMax - inMin) + outMin
}
function angle2pulse(angle){
return Math.floor(map(angle,SERVO_MIN_ANGLE,SERVO_MAX_ANGLE,SERVO_MIN_PULSE ,SERVO_MAX_PULSE))
}
ここでは、角度をパルス幅にマッピングする関数を定義しています。
これは、Gpioクラスにカプセル化されたサーボ制御関数 servoWrite(pulseWidth) が角度の代わりにパルス幅を書き込む必要があるためです。
私たちが使用するサーボの角度範囲は0~180であり、これをパルス幅の範囲、500~2500にマッピングする必要があります。
let angle=90;
let step=5;
setInterval(() => {
if(angle>=180||angle<=0){
step=-step
}
angle+=step;
ServoPin.servoWrite(angle2pulse(angle));
}, 20);
サーボ角度を0から180まで前後に偏向させる。
現象の画像