注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
1.3.2 サーボ
はじめに
このプロジェクトでは、サーボを回転させる方法を学びます。
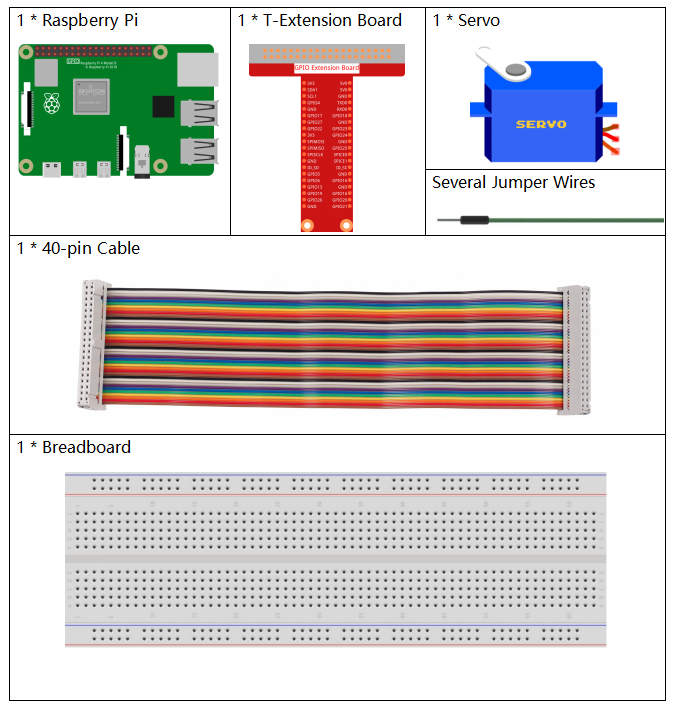
必要な部品
このプロジェクトには、以下の部品が必要です。
全てのキットを購入するのが確かに便利です、こちらがリンクです:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
Raphael Kit |
337 |
以下のリンクから個別に購入することもできます。
コンポーネントの紹介 |
購入リンク |
|---|---|
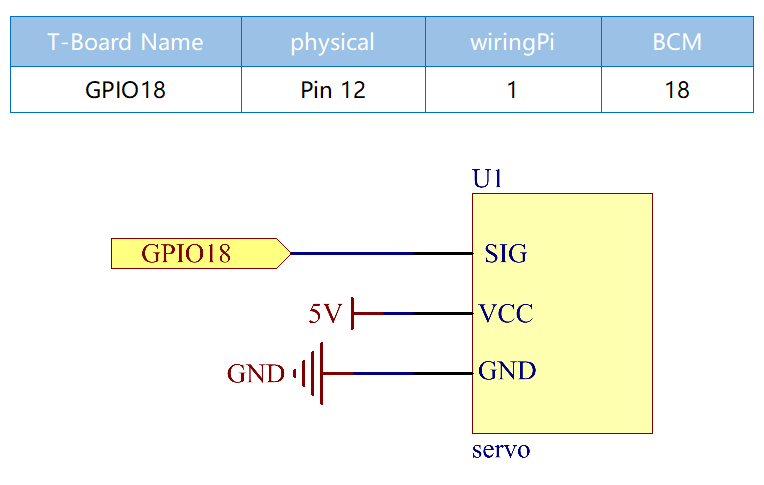
回路図
実験手順
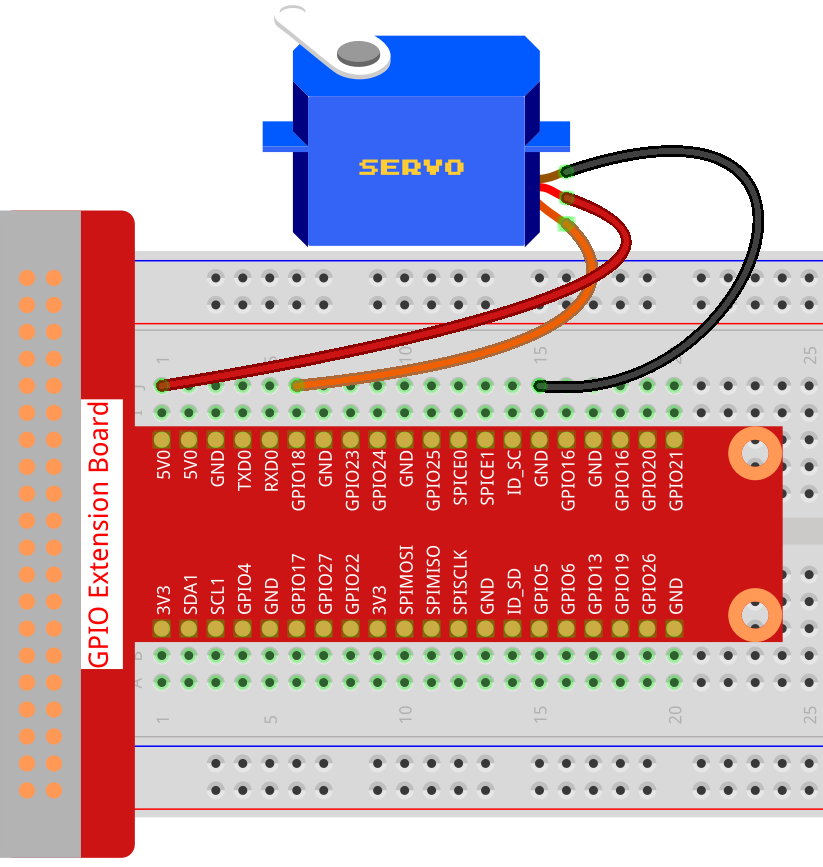
ステップ1: 回路を作成します。
ステップ2: コードのフォルダに移動します。
cd ~/raphael-kit/c/1.3.2
ステップ3: コードをコンパイルします。
gcc 1.3.2_Servo.c -lwiringPi
ステップ4: 上記の実行ファイルを実行します。
sudo ./a.out
プログラムを実行した後、サーボは0度から180度まで、そして180度から0度まで回転し、これを繰り返します。
注釈
実行後に動作しない、またはエラープロンプト「wiringPi.h: No such file or directory」が表示される場合は、 WiringPiのインストールと確認 を参照してください。
コード
#include <wiringPi.h>
#include <softPwm.h>
#include <stdio.h>
#define ServoPin 1 //define the servo to GPIO1
long Map(long value,long fromLow,long fromHigh,long toLow,long toHigh){
return (toHigh-toLow)*(value-fromLow) / (fromHigh-fromLow) + toLow;
}
void setAngle(int pin, int angle){ //Create a funtion to control the angle of the servo.
if(angle < 0)
angle = 0;
if(angle > 180)
angle = 180;
softPwmWrite(pin,Map(angle, 0, 180, 5, 25));
}
int main(void)
{
int i;
if(wiringPiSetup() == -1){ //when initialize wiring failed,print message to screen
printf("setup wiringPi failed !");
return 1;
}
softPwmCreate(ServoPin, 0, 200); //initialize PMW pin of servo
while(1){
for(i=0;i<181;i++){ // Let servo rotate from 0 to 180. setAngle(ServoPin,i);
delay(2);
}
delay(1000);
for(i=181;i>-1;i--){ // Let servo rotate from 180 to 0. setAngle(ServoPin,i);
delay(2);
}
delay(1000);
}
return 0;
}
コード説明
long Map(long value,long fromLow,long fromHigh,long toLow,long toHigh){
return (toHigh-toLow)*(value-fromLow) / (fromHigh-fromLow) + toLow;
}
次のコードでの値をマッピングする Map() 関数を作成します。
void setAngle(int pin, int angle){ //Create a funtion to control the angle of the servo.
if(angle < 0)
angle = 0;
if(angle > 180)
angle = 180;
softPwmWrite(pin,Map(angle, 0, 180, 5, 25));
}
サーボに角度を書き込む関数、 setAngle() を作成します。
softPwmWrite(pin,Map(angle,0,180,5,25));
この関数はPWMのデューティサイクルを変更することができます。
サーボを0 ~ 180°に回転させるために、周期が20msの時にパルス幅を0.5ms ~ 2.5msの範囲内で変更する必要があります。関数 softPwmCreate() で、周期が200x100us=20msであることを設定しているので、0 ~ 180を5x100us ~ 25x100usにマッピングする必要があります。
この関数のプロトタイプは以下のとおりです。
int softPwmCreate(int pin,int initialValue,int pwmRange);
pin: Raspberry Piの任意のGPIOピンをPWMピンとして設定できます。initialValue: 初期のパルス幅は、initialValue倍の100usです。pwmRange: PWMの周期は、pwmRange倍の100usです。
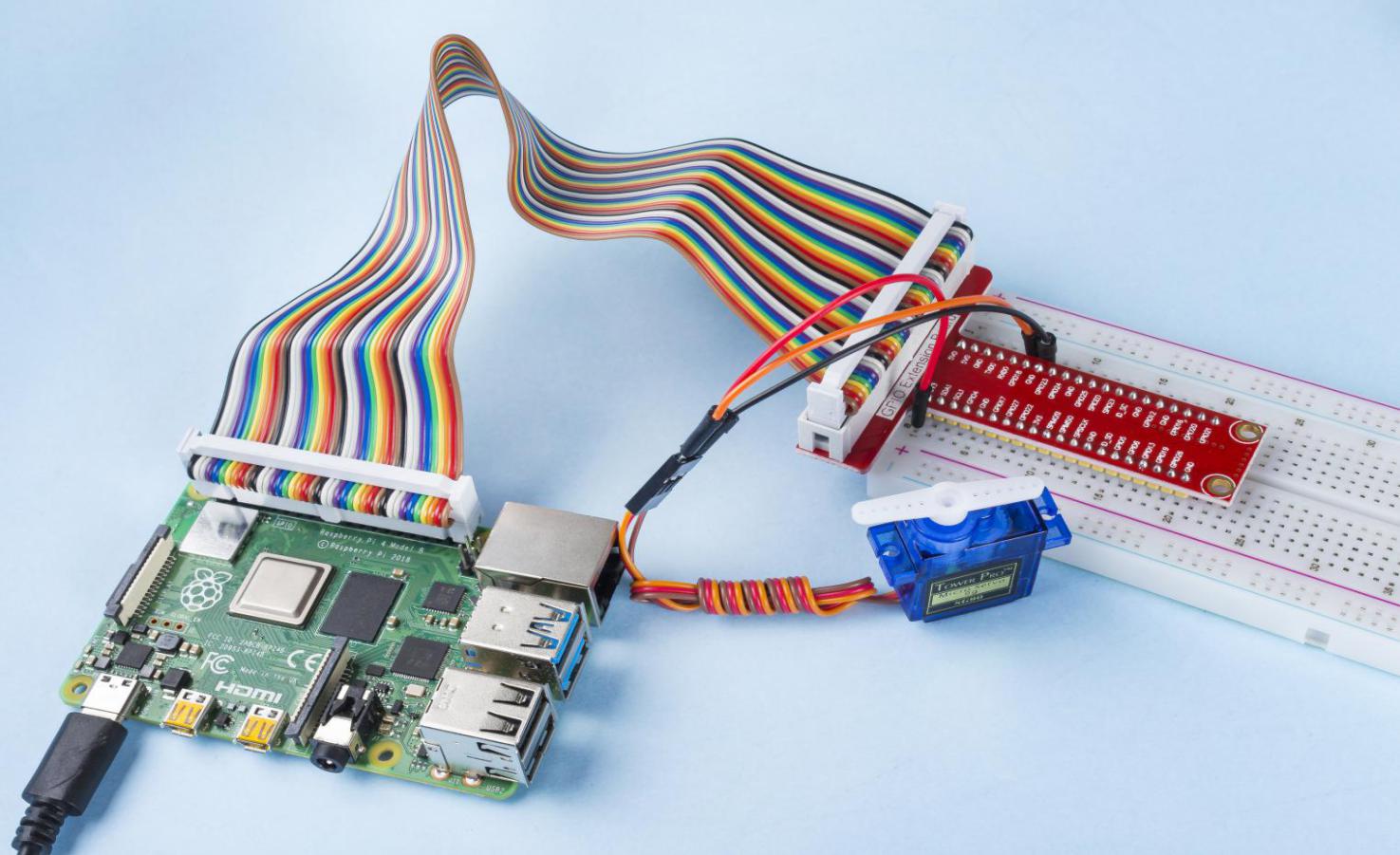
現象の画像