Nota
Ciao, benvenuto nella community di SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto Esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra comunità e del nostro team.
Impara e Condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato ai nuovi annunci di prodotti e anteprime.
Sconti Speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a concorsi e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti subito!
2.2.9 Modulo MPU6050
Introduzione
L’MPU-6050 è il primo e unico dispositivo di tracciamento del movimento a 6 assi al mondo (3 assi giroscopio e 3 assi accelerometro) progettato per smartphone, tablet e sensori indossabili che richiedono tali funzionalità, inclusi bassi consumi energetici, basso costo e alte prestazioni.
In questo esperimento, utilizzeremo l’I2C per ottenere i valori del sensore di accelerazione a tre assi e del giroscopio a tre assi per l’MPU6050 e visualizzarli sullo schermo.
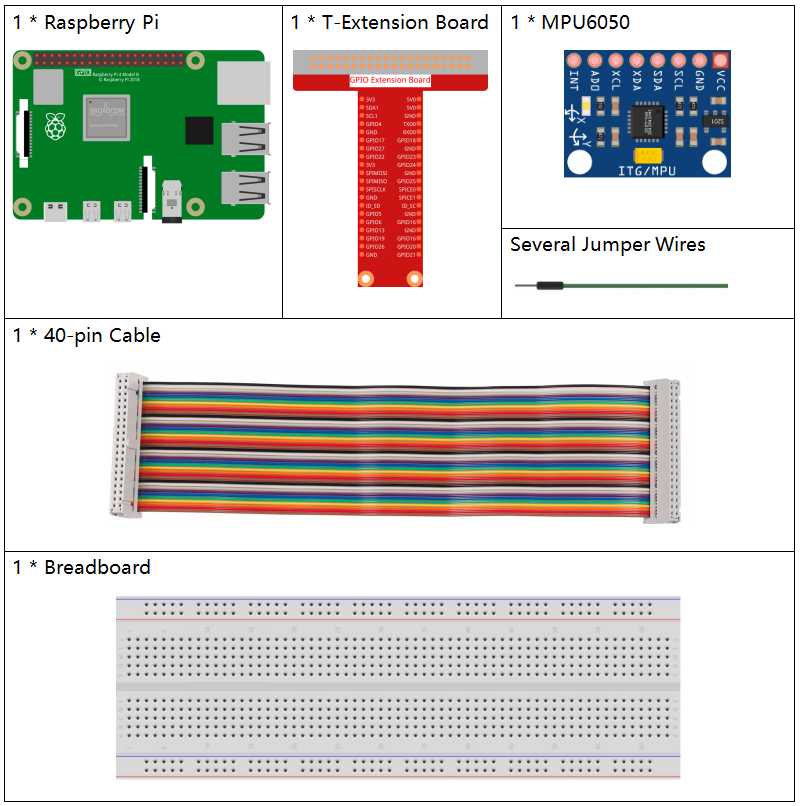
Componenti Necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
COMPONENTI IN QUESTO KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
Puoi anche acquistarli separatamente dai link seguenti.
INTRODUZIONE AI COMPONENTI |
LINK PER L’ACQUISTO |
|---|---|
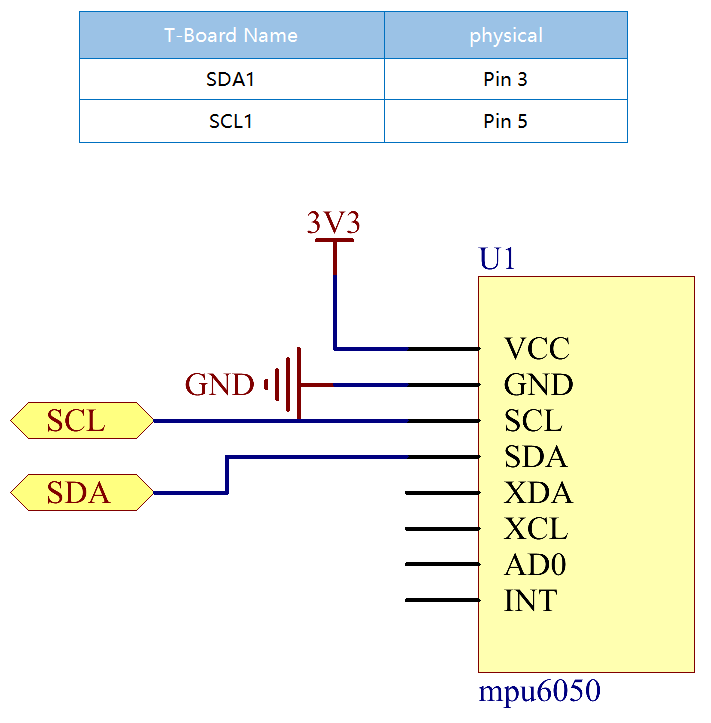
Schema Elettrico
MPU6050 comunica con il microcontrollore tramite l’interfaccia bus I2C. È necessario collegare SDA1 e SCL1 al pin corrispondente.
Procedure Sperimentali
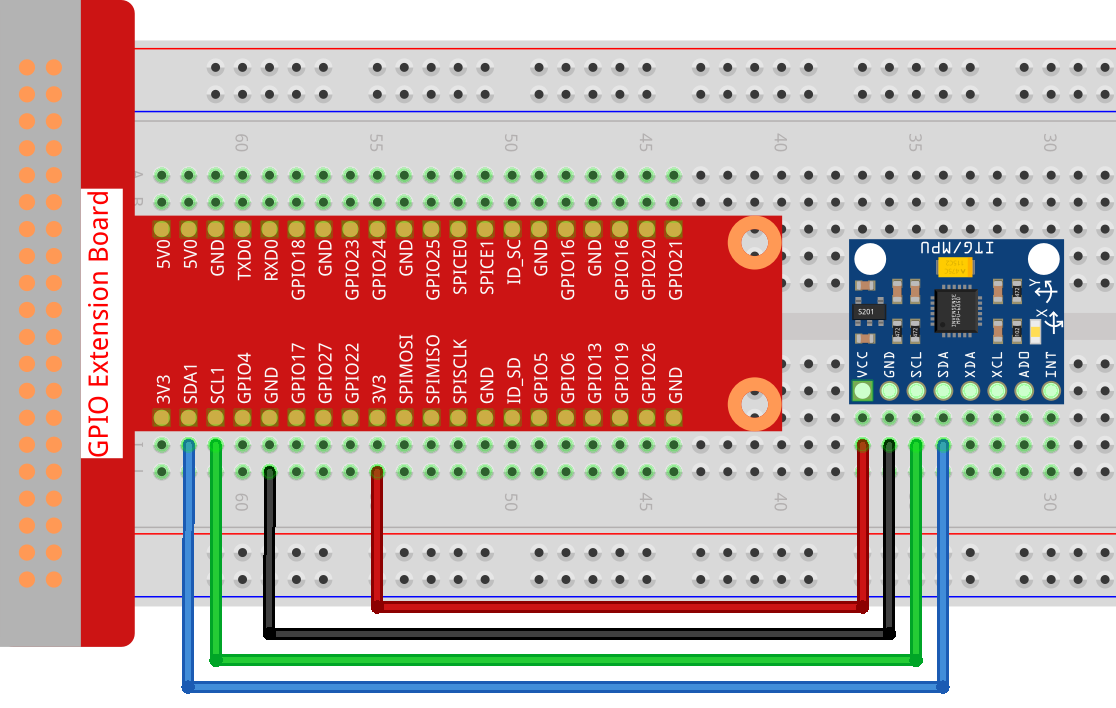
Passo 1: Costruisci il circuito.
Passo 2: Configura l’I2C (vedi Appendice Configurazione I²C. Se hai già configurato l’I2C, salta questo passaggio.)
Passo 3: Vai alla cartella del codice.
cd ~/raphael-kit/c/2.2.9/
Passo 4: Compila il codice.
gcc 2.2.9_mpu6050.c -lwiringPi -lm
Passo 5: Esegui il file eseguibile.
sudo ./a.out
Dopo l’esecuzione del codice, l’angolo di deflessione degli assi x e y, l’accelerazione e la velocità angolare su ciascun asse rilevati dall’MPU6050 verranno stampati sullo schermo dopo essere stati calcolati.
Nota
Se appare un errore come
wiringPi.h: No such file or directory, fai riferimento a Installa e Controlla wiringPi.Se ricevi l’errore
Unable to open I2C device: No such file or directory, devi fare riferimento a Configurazione I²C per abilitare l’I2C e verificare se il cablaggio è corretto.
Codice
#include <wiringPiI2C.h>
#include <wiringPi.h>
#include <stdio.h>
#include <math.h>
int fd;
int acclX, acclY, acclZ;
int gyroX, gyroY, gyroZ;
double acclX_scaled, acclY_scaled, acclZ_scaled;
double gyroX_scaled, gyroY_scaled, gyroZ_scaled;
int read_word_2c(int addr)
{
int val;
val = wiringPiI2CReadReg8(fd, addr);
val = val << 8;
val += wiringPiI2CReadReg8(fd, addr+1);
if (val >= 0x8000)
val = -(65536 - val);
return val;
}
double dist(double a, double b)
{
return sqrt((a*a) + (b*b));
}
double get_y_rotation(double x, double y, double z)
{
double radians;
radians = atan2(x, dist(y, z));
return -(radians * (180.0 / M_PI));
}
double get_x_rotation(double x, double y, double z)
{
double radians;
radians = atan2(y, dist(x, z));
return (radians * (180.0 / M_PI));
}
int main()
{
fd = wiringPiI2CSetup (0x68);
wiringPiI2CWriteReg8 (fd,0x6B,0x00);//disabilita la modalità sleep
printf("set 0x6B=%X\n",wiringPiI2CReadReg8 (fd,0x6B));
while(1) {
gyroX = read_word_2c(0x43);
gyroY = read_word_2c(0x45);
gyroZ = read_word_2c(0x47);
gyroX_scaled = gyroX / 131.0;
gyroY_scaled = gyroY / 131.0;
gyroZ_scaled = gyroZ / 131.0;
//Stampa i valori degli assi X, Y e Z del sensore giroscopico.
printf("My gyroX_scaled: %f\n", gyroY X_scaled);
printf("My gyroY_scaled: %f\n", gyroY Y_scaled);
printf("My gyroZ_scaled: %f\n", gyroY Z_scaled);
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
//Stampa i valori X, Y e Z del sensore di accelerazione.
printf("My acclX_scaled: %f\n", acclX_scaled);
printf("My acclY_scaled: %f\n", acclY_scaled);
printf("My acclZ_scaled: %f\n", acclZ_scaled);
printf("My X rotation: %f\n", get_x_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
printf("My Y rotation: %f\n", get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
delay(100);
}
return 0;
}
Spiegazione del Codice
int read_word_2c(int addr)
{
int val;
val = wiringPiI2CReadReg8(fd, addr);
val = val << 8;
val += wiringPiI2CReadReg8(fd, addr+1);
if (val >= 0x8000)
val = -(65536 - val);
return val;
}
Leggi i dati del sensore inviati dall’MPU6050.
double get_y_rotation(double x, double y, double z)
{
double radians;
radians = atan2(x, dist(y, z));
return -(radians * (180.0 / M_PI));
}
Ottieni l’angolo di deflessione sull’asse Y.
double get_x_rotation(double x, double y, double z)
{
double radians;
radians = atan2(y, dist(x, z));
return (radians * (180.0 / M_PI));
}
Calcola l’angolo di deflessione dell’asse X.
gyroX = read_word_2c(0x43);
gyroY = read_word_2c(0x45);
gyroZ = read_word_2c(0x47);
gyroX_scaled = gyroX / 131.0;
gyroY_scaled = gyroY / 131.0;
gyroZ_scaled = gyroZ / 131.0;
//Stampa i valori degli assi X, Y e Z del sensore giroscopico.
printf("My gyroX_scaled: %f\n", gyroX_scaled);
printf("My gyroY_scaled: %f\n", gyroY_scaled);
printf("My gyroZ_scaled: %f\n", gyroZ_scaled);
Leggi i valori degli assi x, y e z sul sensore giroscopico, converti i metadati in valori di velocità angolare e quindi stampali.
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
//Stampa i valori X, Y e Z del sensore di accelerazione.
printf("My acclX_scaled: %f\n", acclX_scaled);
printf("My acclY_scaled: %f\n", acclY_scaled);
printf("My acclZ_scaled: %f\n", acclZ_scaled);
Leggi i valori degli assi x, y e z sul sensore di accelerazione, converti i metadati in valori di accelerazione (unità gravitazionale), e stampali.
printf("My X rotation: %f\n", get_x_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
printf("My Y rotation: %f\n", get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
Stampa gli angoli di deflessione degli assi x e y.
Immagine del Fenomeno