Nota
Ciao, benvenuto nella community di SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto Esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra comunità e del nostro team.
Impara e Condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato a nuovi annunci di prodotti e anteprime.
Sconti Speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a concorsi e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti subito!
2.1.6 Modulo Encoder Rotativo
Introduzione
In questo progetto imparerai a utilizzare l’encoder rotativo. Un encoder rotativo è un interruttore elettronico che genera una sequenza regolare di impulsi in stretta sequenza temporale. Se utilizzato con un IC, può eseguire operazioni come incremento, decremento, cambio di pagina e altre funzioni simili allo scorrimento del mouse o alla selezione dei menu.
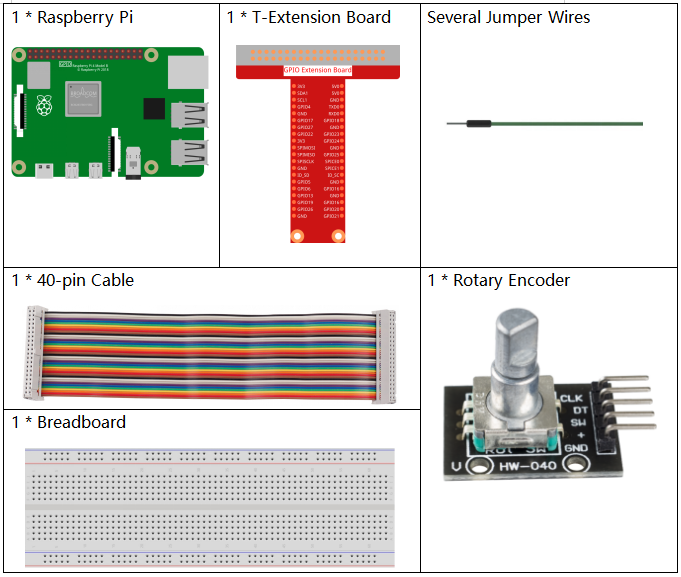
Componenti Necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
COMPONENTI IN QUESTO KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
Puoi anche acquistarli separatamente dai link seguenti.
INTRODUZIONE AI COMPONENTI |
LINK PER L’ACQUISTO |
|---|---|
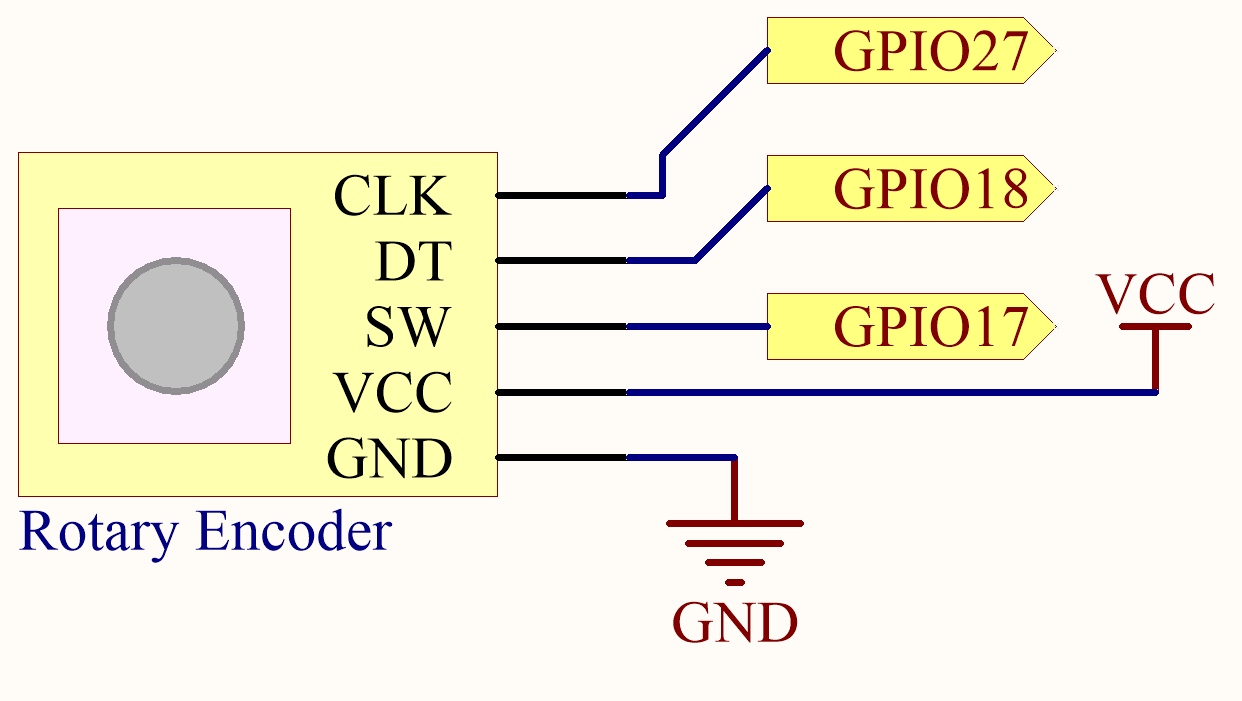
Schema Elettrico
Procedure Sperimentali
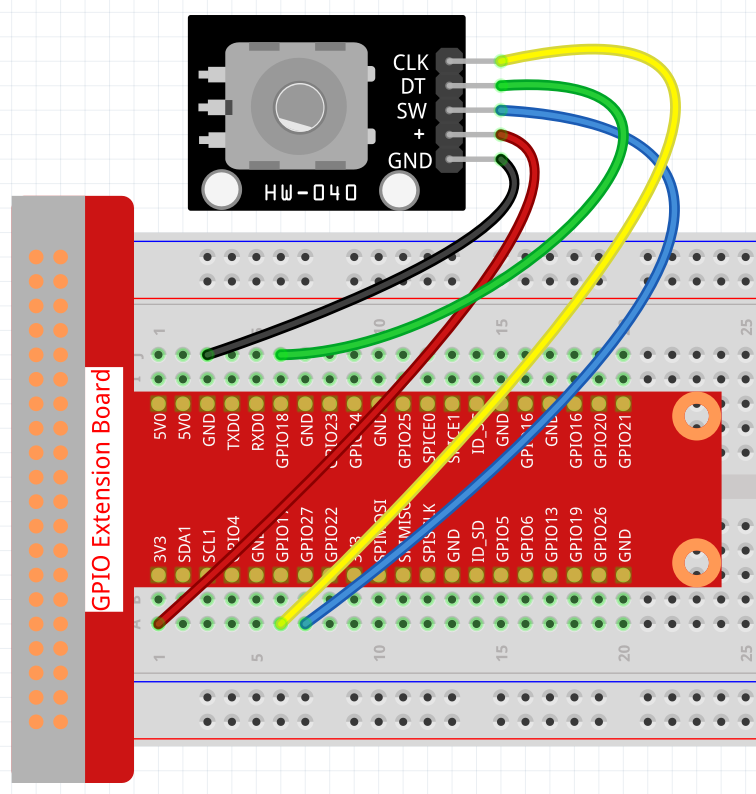
Passo 1: Costruisci il circuito.
Passo 2: Apri il file del codice.
cd ~/raphael-kit/c/2.1.6/
Passo 3: Compila il codice.
gcc 2.1.6_RotaryEncoder.c -lwiringPi
Passo 4: Esegui.
sudo ./a.out
Vedrai il conteggio sulla shell. Quando giri l’encoder rotativo in senso orario, il conteggio aumenta; se lo giri in senso antiorario, il conteggio diminuisce. Se premi l’interruttore sull’encoder rotativo, i valori torneranno a zero.
Nota
Se non funziona dopo l’esecuzione o appare un errore come: "wiringPi.h: No such file or directory", fai riferimento a Installa e Controlla wiringPi.
Codice
#include <stdio.h>
#include <string.h>
#include <errno.h>
#include <stdlib.h>
#include <wiringPi.h>
#define clkPin 0
#define dtPin 1
#define swPin 2
static volatile int globalCounter = 0 ;
unsigned char flag;
unsigned char Last_dtPin_Status;
unsigned char Current_dtPin_Status;
void btnISR(void)
{
globalCounter = 0;
}
void rotaryDeal(void)
{
Last_dtPin_Status = digitalRead(dtPin);
while(!digitalRead(clkPin)){
Current_dtPin_Status = digitalRead(dtPin);
flag = 1;
}
if(flag == 1){
flag = 0;
if((Last_dtPin_Status == 0)&&(Current_dtPin_Status == 1)){
globalCounter --;
}
if((Last_dtPin_Status == 1)&&(Current_dtPin_Status == 0)){
globalCounter ++;
}
}
}
int main(void)
{
if(wiringPiSetup() < 0){
fprintf(stderr, "Unable to setup wiringPi:%s\n",strerror(errno));
return 1;
}
pinMode(swPin, INPUT);
pinMode(clkPin, INPUT);
pinMode(dtPin, INPUT);
pullUpDnControl(swPin, PUD_UP);
if(wiringPiISR(swPin, INT_EDGE_FALLING, &btnISR) < 0){
fprintf(stderr, "Unable to init ISR\n",strerror(errno));
return 1;
}
int tmp = 0;
while(1){
rotaryDeal();
if (tmp != globalCounter){
printf("%d\n", globalCounter);
tmp = globalCounter;
}
}
return 0;
}
Analisi del Codice
Leggi il valore di dtPin quando clkPin è basso.
Quando clkPin è alto, se dtPin passa da basso a alto, il conteggio diminuisce, altrimenti il conteggio aumenta.
swPin emetterà un valore basso quando l’albero viene premuto.
Da qui, il flusso del programma è mostrato di seguito:

Immagine del Fenomeno
