Note
Bonjour et bienvenue dans la communauté SunFounder Raspberry Pi & Arduino & ESP32 sur Facebook ! Plongez plus profondément dans l’univers Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après‑vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Obtenez un accès anticipé aux annonces de nouveaux produits et aux avant‑premières.
Réductions spéciales : Profitez de remises exclusives sur nos derniers produits.
Promotions et concours festifs : Participez à des concours et promotions de vacances.
👉 Prêt à explorer et créer avec nous ? Cliquez sur [Ici] et rejoignez‑nous dès aujourd’hui !
2.1.9 Joystick (MCP3008)
Note
Selon la version de votre kit, veuillez identifier si vous avez ADC0834 ou MCP3008 et suivre la section correspondante.
Introduction
Dans ce projet, nous allons apprendre comment fonctionne un joystick. Nous manipulons le joystick et affichons les résultats à l’écran.
Composants requis
Dans ce projet, nous avons besoin des composants suivants :
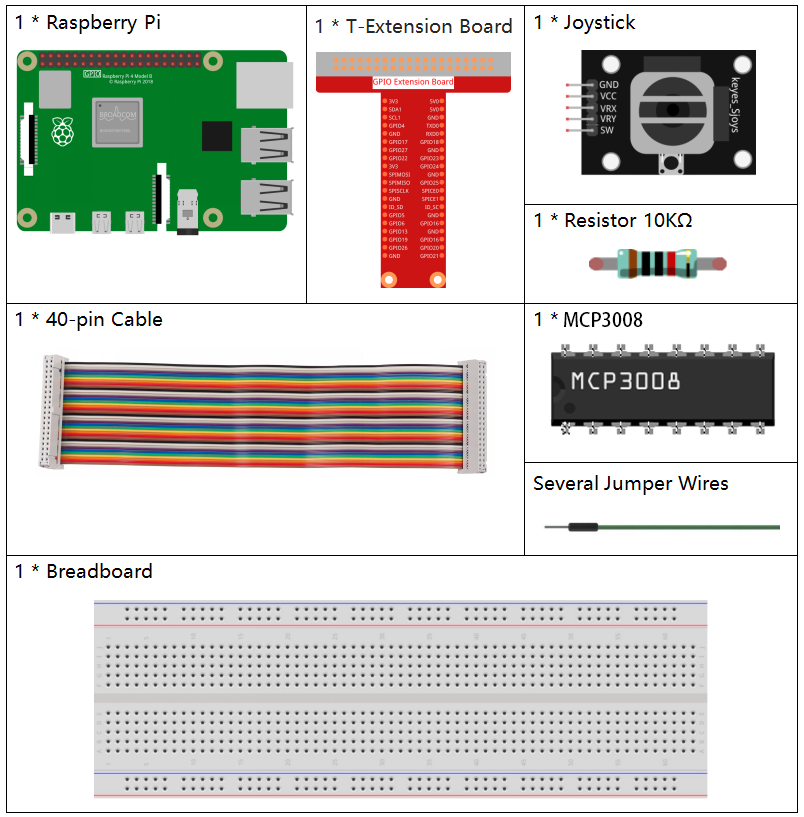
Il est évidemment plus pratique d’acheter un kit complet, voici le lien :
Nom |
ÉLÉMENTS DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément via les liens ci‑dessous :
INTRODUCTION DU COMPOSANT |
LIEN D’ACHAT |
|---|---|
- |
|
- |
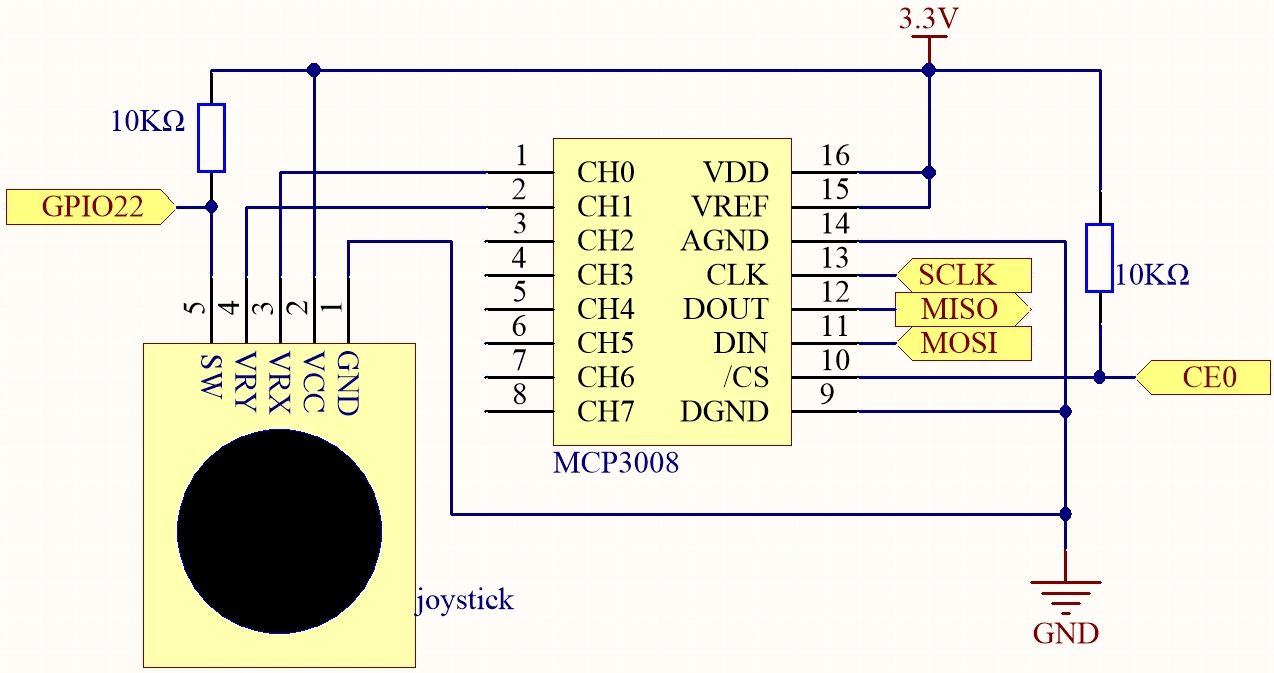
Schéma
Lors de la lecture des données du joystick, il y a quelques différences entre les axes : les données des axes X et Y sont analogiques et nécessitent l’utilisation du MCP3008 pour convertir la valeur analogique en valeur numérique. Les données de l’axe Z sont numériques, vous pouvez donc utiliser directement le GPIO ou également l’ADC.
Nom T‑Board |
Physique |
WiringPi |
BCM |
|---|---|---|---|
SPICE0 |
pin24 |
10 |
8 |
SPIMOSI |
pin19 |
12 |
10 |
SPIMISO |
pin21 |
13 |
9 |
SPISCLK |
pin23 |
14 |
11 |
GPIO22 |
pin15 |
3 |
22 |
Procédure expérimentale
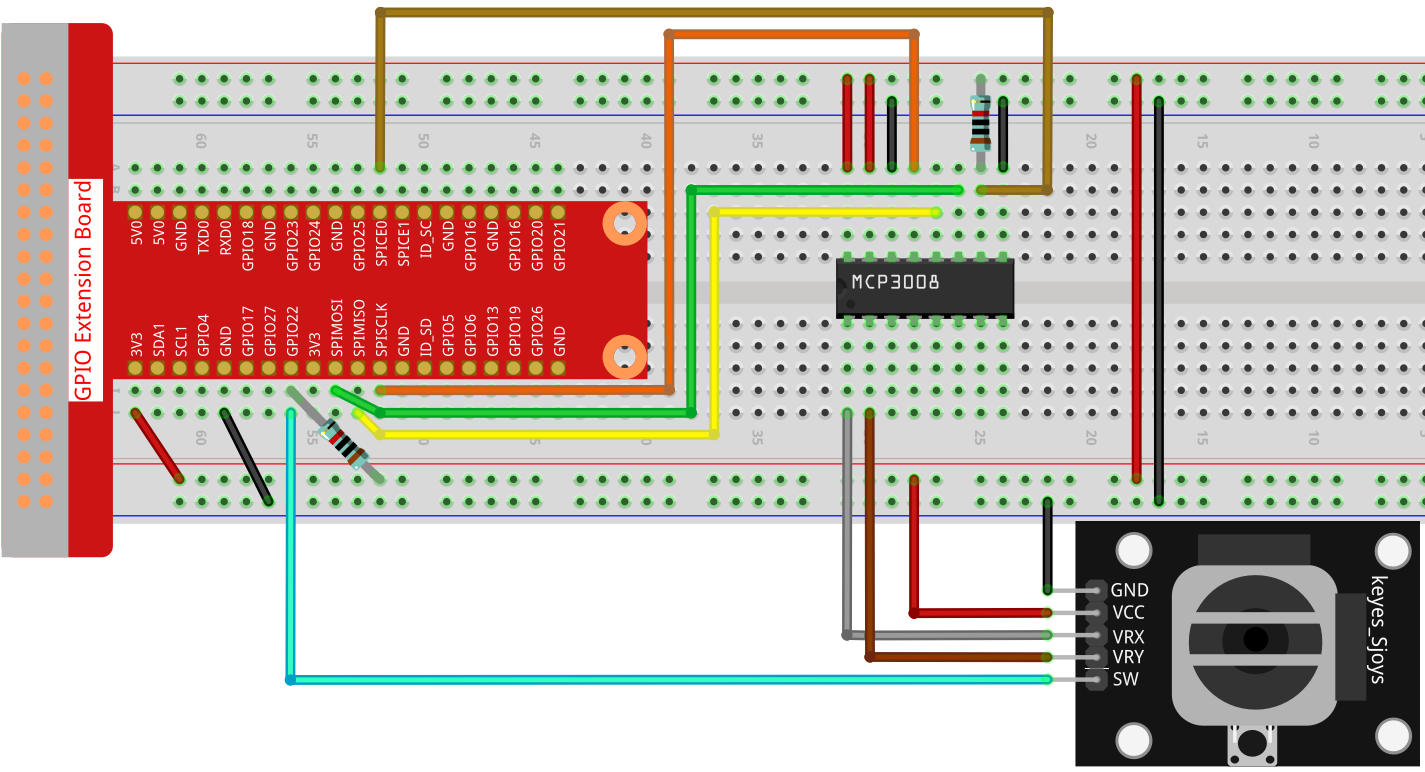
Étape 1 : Construire le circuit.
Étape 2 : Configurer l’interface SPI et installer la bibliothèque spidev (voir Configuration SPI pour des instructions détaillées).
Si vous avez déjà effectué ces étapes, vous pouvez les ignorer.
Étape 3 : Aller dans le dossier du code.
cd ~/raphael-kit/python-pi5
Étape 4 : Exécuter.
sudo python3 2.1.9-2_Joystick_zero.py
Après exécution du code, déplacez le joystick : les valeurs correspondantes de x, y et Btn s’affichent à l’écran.
Avertissement
Si un message d’erreur RuntimeError: Cannot determine SOC peripheral base address apparaît, reportez‑vous à Si « gpiozero » ne fonctionne pas..
Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci‑dessous.
Mais avant cela, vous devez aller dans le chemin du code source comme raphael-kit/python-pi5.
Après modification, vous pouvez exécuter directement le code pour voir l’effet.
#!/usr/bin/env python3
from gpiozero import Button
import spidev
import time
# Initialiser le bouton connecté à la broche GPIO 22 (broche SW du joystick)
BtnPin = Button(22)
# Initialiser la communication SPI avec MCP3008
spi = spidev.SpiDev()
spi.open(0, 0) # Ouvrir le bus SPI 0, périphérique CE0
spi.max_speed_hz = 1000000 # Vitesse SPI : 1 MHz
def read_adc(channel):
"""
Lire une valeur analogique depuis le canal MCP3008 spécifié (0–7)
:param channel: numéro du canal ADC (0–7)
:return: valeur entière 10 bits (0–1023)
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
try:
# Boucle principale : lire et afficher les valeurs du joystick et l’état du bouton
while True:
# Lire les valeurs X et Y depuis les canaux MCP3008 0 et 1
x_val = read_adc(0) # VRX du joystick connecté à CH0
y_val = read_adc(1) # VRY du joystick connecté à CH1
# Lire l’état du bouton du joystick (SW)
Btn_val = BtnPin.value # 0 = pressé, 1 = relâché
# Afficher les valeurs lues
print('X: %d Y: %d Btn: %d' % (x_val, y_val, Btn_val))
# Attendre 0,2 seconde avant la prochaine lecture
time.sleep(0.2)
# Gérer proprement l’interruption Ctrl+C
except KeyboardInterrupt:
spi.close()
Explication du code
Cette section importe les bibliothèques nécessaires :
gpiozero.Buttonest utilisée pour lire l’état numérique du bouton du joystick (broche SW).spidevest utilisée pour la communication SPI avec la puce ADC MCP3008.timeest utilisée pour les délais entre lectures.
from gpiozero import Button import spidev import time
Initialiser le bouton connecté à GPIO22 (broche SW du joystick) et configurer l’interface SPI sur le bus 0, chip select 0 (CE0). La vitesse SPI est fixée à 1 MHz.
BtnPin = Button(22) spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000
Définir une fonction
read_adc(channel)pour lire la valeur analogique d’un canal spécifique du MCP3008 (0–7). Elle envoie trois octets via le protocole SPI et retourne une valeur 10 bits (0–1023).def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) return ((adc[1] & 0x03) << 8) | adc[2]
Dans la boucle principale, on lit les valeurs analogiques de VRX (CH0) et VRY (CH1), ainsi que l’état du bouton du joystick. Les valeurs sont affichées toutes les 0,2 s. En cas d’interruption par Ctrl+C, l’interface SPI est correctement fermée.
try: while True: x_val = read_adc(0) y_val = read_adc(1) Btn_val = BtnPin.value print('X: %d Y: %d Btn: %d' % (x_val, y_val, Btn_val)) time.sleep(0.2) except KeyboardInterrupt: spi.close()