Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [Ici] et rejoignez-nous aujourd’hui !
2.2.5 Module d’Évitement d’Obstacles IR
Introduction
Dans ce projet, nous allons découvrir le module d’évitement d’obstacles IR, qui est un module de capteur pouvant être utilisé pour détecter des obstacles à courte distance, avec une faible interférence, facile à assembler et à utiliser, etc. Il peut être largement utilisé dans l’évitement d’obstacles pour robots, les chariots d’évitement d’obstacles, le comptage sur les lignes d’assemblage, etc.
Composants Nécessaires
Dans ce projet, nous avons besoin des composants suivants.
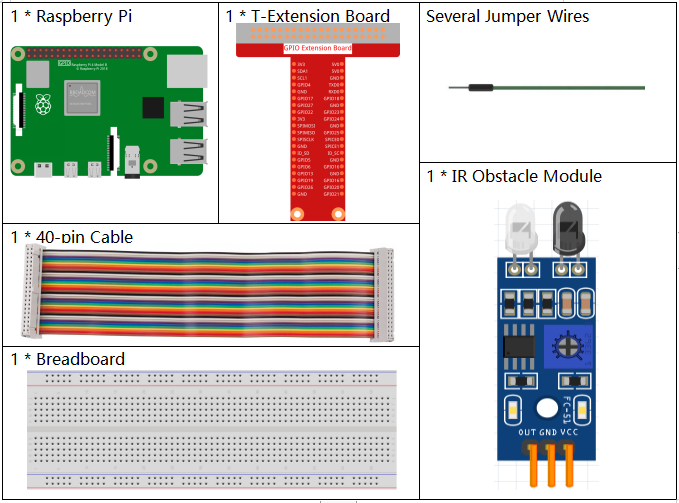
Il est certainement pratique d’acheter un kit complet, voici le lien :
Nom |
ÉLÉMENTS DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément via les liens ci-dessous.
INTRODUCTION DES COMPOSANTS |
LIEN D’ACHAT |
|---|---|
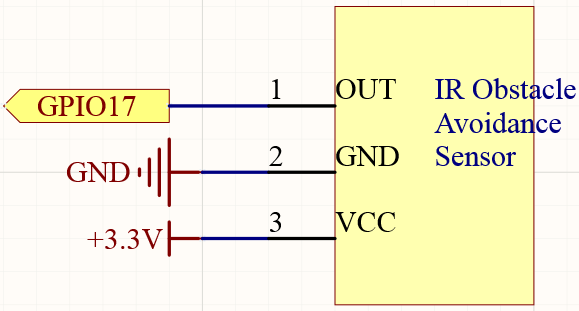
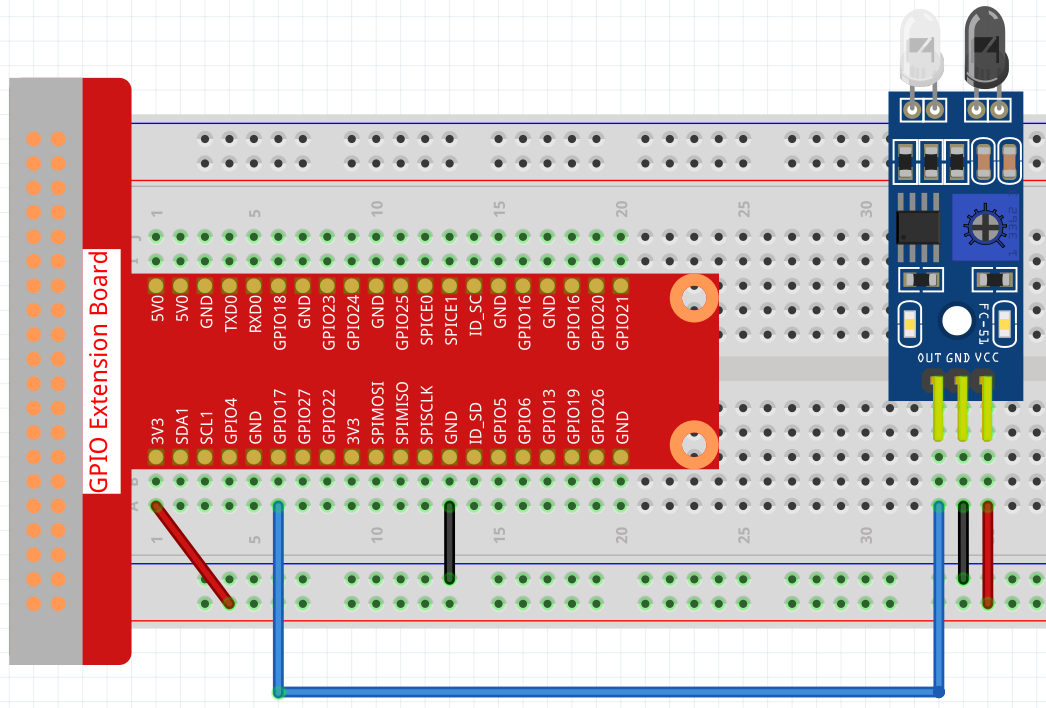
Schéma de Câblage
Procédures Expérimentales
Étape 1: Construire le circuit.
Étape 2: Changer de répertoire.
cd ~/raphael-kit/c/2.2.5/
Étape 3 : Compiler.
gcc 2.2.5_IrObstacle.c -lwiringPi
Étape 4 : Exécuter.
sudo ./a.out
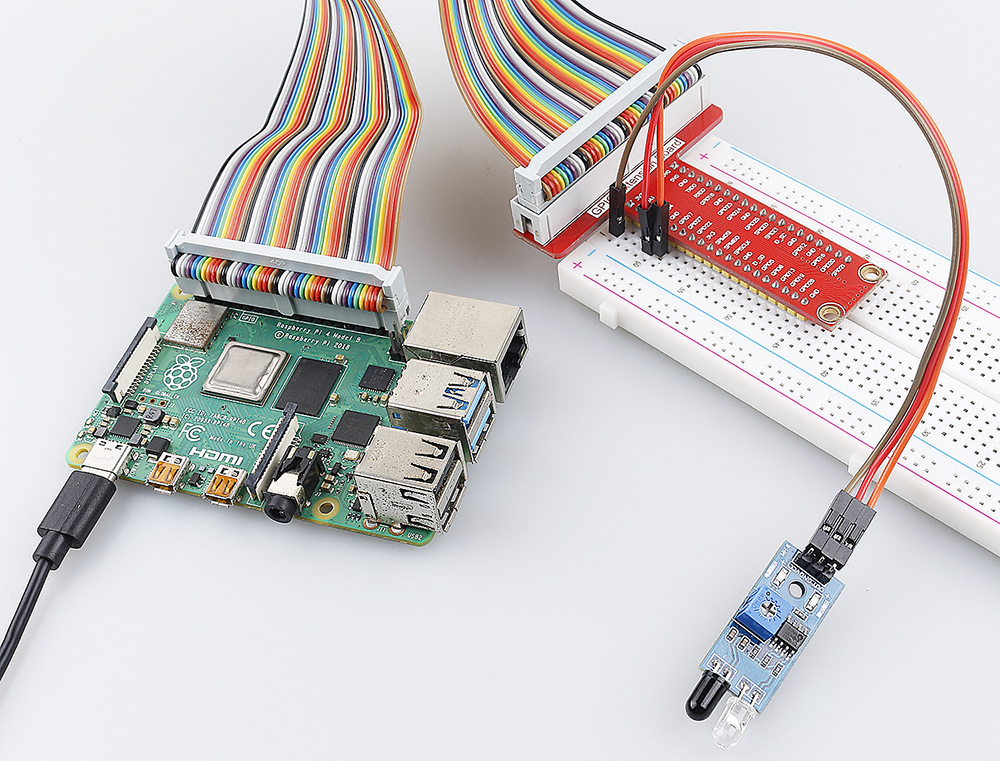
Après l’exécution du code, lorsque vous mettez votre main devant la sonde du module, l’indicateur de sortie du module s’allume et le message « Detected Barrier! » sera répété à l’écran.
Note
Si cela ne fonctionne pas après l’exécution, ou s’il y a une erreur indiquant : "wiringPi.h: No such file or directory", veuillez vous référer à Installer et vérifier WiringPi.
Code
#include <wiringPi.h>
#include <stdio.h>
#define ObstaclePin 0
void myISR(void)
{
printf("Detected Barrier !\n");
}
int main(void)
{
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen
printf("setup wiringPi failed !\n");
return 1;
}
if(wiringPiISR(ObstaclePin, INT_EDGE_FALLING, &myISR) < 0){
printf("Unable to setup ISR !!!\n");
return 1;
}
while(1){
;
}
return 0;
}
Explication du Code
void myISR(void)
{
printf("Detected Barrier !\n");
}
Définissez une fonction myISR() pour afficher obstacle detected , indiquant qu’un obstacle est détecté.
if(wiringPiISR(ObstaclePin, INT_EDGE_FALLING, &myISR) < 0){
printf("Unable to setup ISR !!!\n");
return 1;
}
Cette fonction wiringPiISR() enregistre une fonction myISR() pour recevoir des interruptions sur le ObstaclePin spécifié.
Lorsque ObstaclePin passe de haut à bas, cela signifie qu’un obstacle est détecté. À ce moment-là, appelez la fonction myISR() pour afficher « Detected Barrier ! »
Le prototype de cette fonction wiringPiISR() est montré ci-dessous.
int wiringPiISR (int pin, int edgeType, void (*function)(void)) ;
Le paramètre edgeType est soit INT_EDGE_FALLING, INT_EDGE_RISING, INT_EDGE_BOTH ou INT_EDGE_SETUP. Si c’est INT_EDGE_SETUP, alors aucune initialisation de la broche n’aura lieu - on suppose que vous avez déjà configuré la broche ailleurs (par exemple, avec le programme gpio), mais si vous spécifiez l’un des autres types, alors la broche sera exportée et initialisée comme spécifié.
Pour plus d’informations, veuillez vous référer à : wiringPi-Functions (API).
Image du Phénomène