Nota
¡Hola, bienvenido a la Comunidad de Entusiastas de SunFounder Raspberry Pi & Arduino & ESP32 en Facebook! Sumérgete más en Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprender y compartir: Intercambia consejos y tutoriales para mejorar tus habilidades.
Preestrenos exclusivos: Obtén acceso anticipado a nuevos anuncios de productos y adelantos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más nuevos.
Promociones festivas y sorteos: Participa en sorteos y promociones navideñas.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
2.2.5 Sensor de Evitación de Obstáculos por IR
Introducción
En este proyecto, aprenderemos sobre el módulo de evitación de obstáculos por IR, que es un módulo sensor que se puede utilizar para detectar obstáculos a distancias cortas, con poca interferencia, fácil de ensamblar, fácil de usar, etc. Puede ser ampliamente utilizado en la evitación de obstáculos de robots, carros de evitación de obstáculos, conteo en líneas de ensamblaje, etc.
Componentes necesarios
En este proyecto, necesitamos los siguientes componentes.
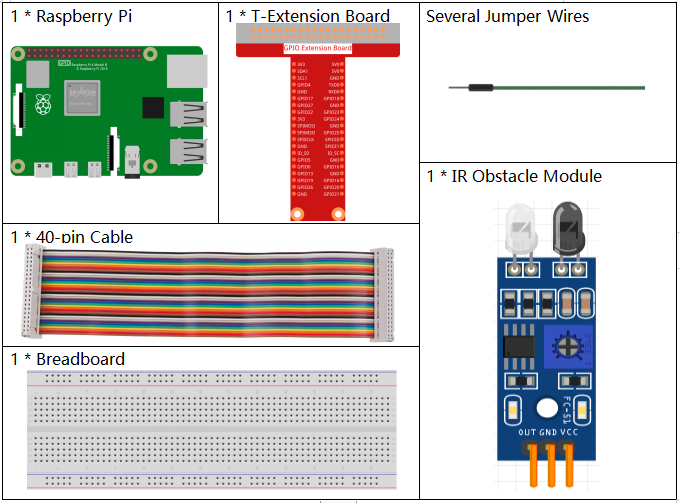
Es definitivamente conveniente comprar un kit completo, aquí está el enlace:
Nombre |
COMPONENTES EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Raphael |
337 |
También puedes comprarlos por separado en los enlaces a continuación.
INTRODUCCIÓN DE COMPONENTES |
ENLACE DE COMPRA |
|---|---|
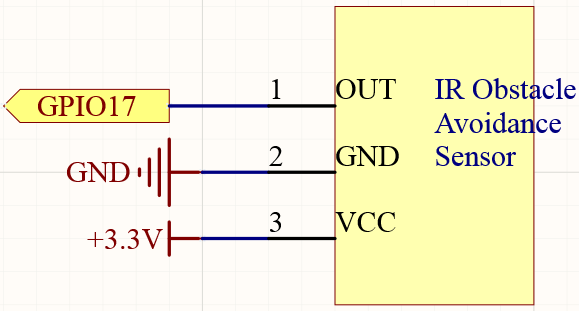
Diagrama Esquemático
Procedimientos Experimentales
Paso 1: Construye el circuito

Paso 2: Cambia de directorio.
cd ~/raphael-kit/python-pi5
Paso 3: Ejecuta.
sudo python3 2.2.5_IrObstacle_zero.py
Después de ejecutar el código, cuando pongas tu mano frente a la sonda del módulo, el indicador de salida en el módulo se encenderá y se imprimirá repetidamente en la pantalla «¡Barrera detectada!» hasta que retires tu mano.
Advertencia
Si recibe el mensaje de error RuntimeError: Cannot determine SOC peripheral base address, consulte Si «gpiozero» no funciona.
Código
Nota
Puedes Modificar/Restablecer/Copiar/Ejecutar/Detener el código a continuación. Pero antes, debes ir a la ruta del código fuente como raphael-kit/python-pi5. Después de modificar el código, puedes ejecutarlo directamente para ver el efecto.
#!/usr/bin/env python3
from gpiozero import Button
import time
# Inicializar el sensor de obstáculos conectado al pin GPIO 17
# El sensor está configurado con una resistencia pull-up
obstacle_sensor = Button(17, pull_up=True)
try:
# Monitorear continuamente los obstáculos
while True:
if obstacle_sensor.is_pressed: # Check if the sensor is triggered
print("Detected Barrier!") # Print a message when an obstacle is detected
time.sleep(1) # Delay for 1 second to avoid repetitive messages
except KeyboardInterrupt:
# Manejar KeyboardInterrupt (Ctrl+C) para una salida limpia y segura
pass
Explicación del Código
Esta línea configura el script para ejecutarse utilizando Python 3. Importa la clase
Buttonde gpiozero (utilizada para el sensor de obstáculos) y el módulotimepara retrasos.#!/usr/bin/env python3 from gpiozero import Button import time
Inicializa un sensor de obstáculos conectado al pin GPIO 17 con una resistencia pull-up interna.
# Inicializar el sensor de obstáculos conectado al pin GPIO 17 # El sensor está configurado con una resistencia pull-up obstacle_sensor = Button(17, pull_up=True)
En un bucle continuo, el programa verifica si el sensor de obstáculos está activado (
is_pressed). Si se detecta un obstáculo, imprime «¡Obstáculo detectado!» y luego espera un segundo (para evitar mensajes repetitivos). La estructuratry-exceptse utiliza para manejar un KeyboardInterrupt y permitir una salida limpia.try: # Monitorear continuamente los obstáculos while True: if obstacle_sensor.is_pressed: # Check if the sensor is triggered print("Detected Barrier!") # Print a message when an obstacle is detected time.sleep(1) # Delay for 1 second to avoid repetitive messages except KeyboardInterrupt: # Manejar KeyboardInterrupt (Ctrl+C) para una salida limpia y segura pass