Nota
¡Hola, bienvenido a la Comunidad de Entusiastas de SunFounder Raspberry Pi & Arduino & ESP32 en Facebook! Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte Experto: Resuelve problemas post-venta y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances Exclusivos: Obtén acceso anticipado a nuevos anuncios de productos y adelantos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más nuevos.
Promociones y Sorteos Festivos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo!
1.3.2 Servo
Introducción
En este proyecto, aprenderemos a hacer que el servo gire.
Componentes Necesarios
En este proyecto, necesitamos los siguientes componentes.
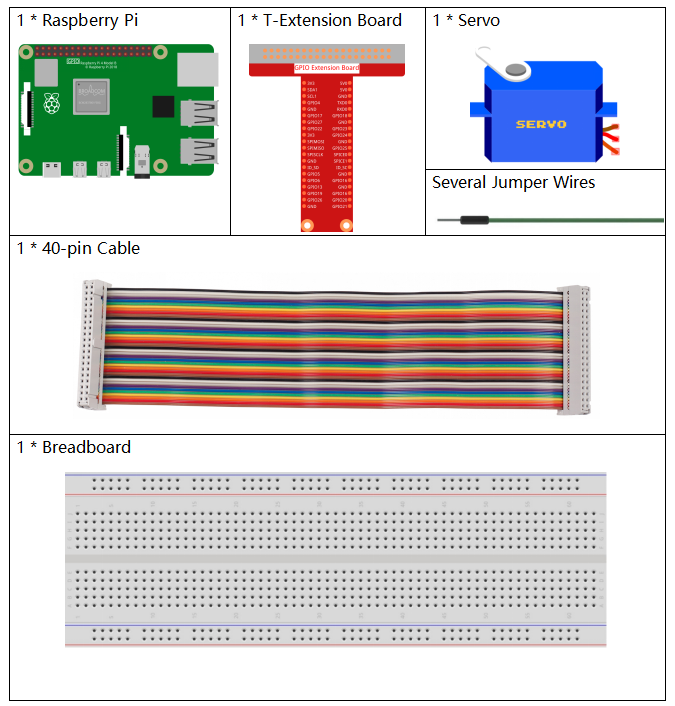
Es definitivamente conveniente comprar un kit completo, aquí está el enlace:
Nombre |
ARTÍCULOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Raphael |
337 |
También puedes comprarlos por separado en los enlaces a continuación.
INTRODUCCIÓN DEL COMPONENTE |
ENLACE DE COMPRA |
|---|---|
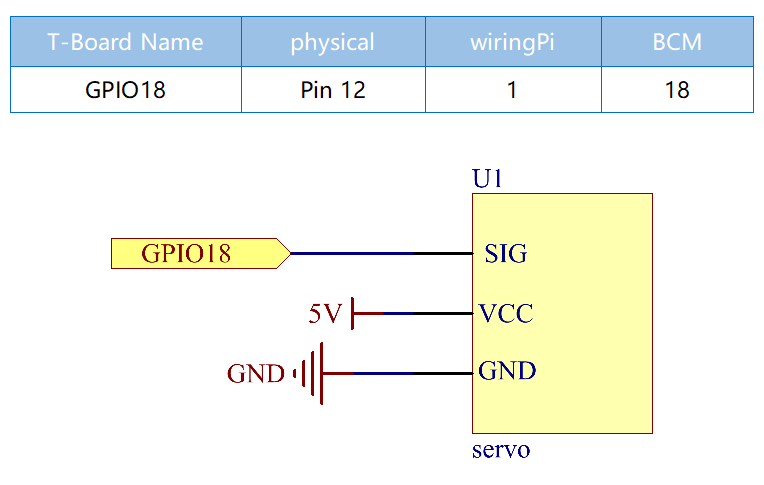
Diagrama Esquemático
Procedimientos Experimentales
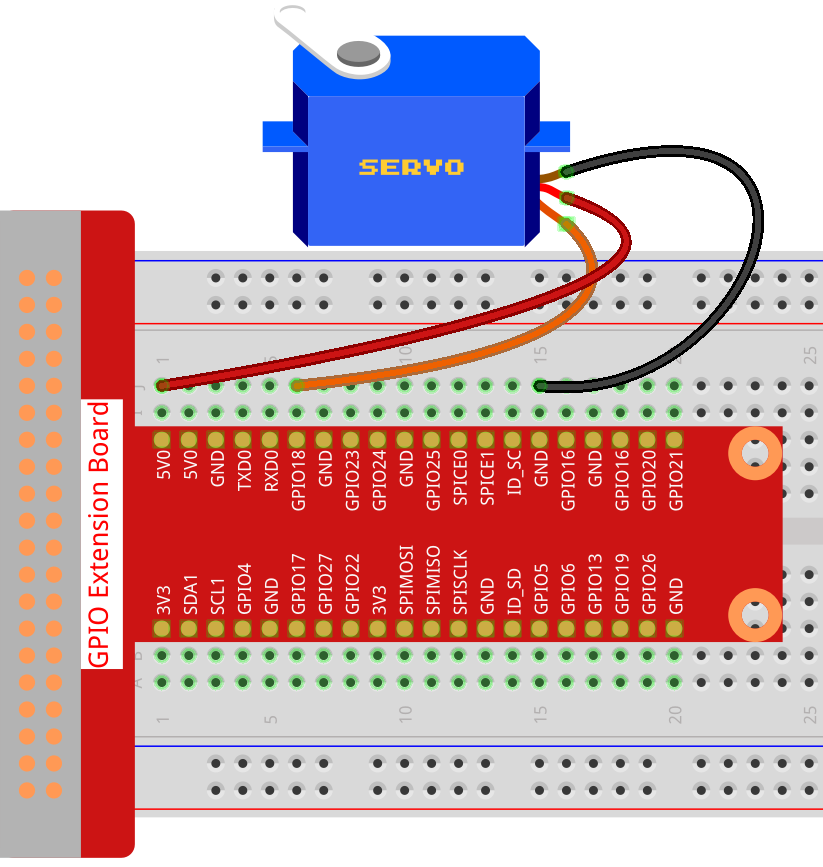
Paso 1: Construye el circuito.
Paso 2: Ve a la carpeta del código.
cd ~/raphael-kit/c/1.3.2
Paso 3: Compila el código.
gcc 1.3.2_Servo.c -lwiringPi
Paso 4: Ejecuta el archivo ejecutable.
sudo ./a.out
Después de ejecutar el programa, el servo rotará de 0 grados a 180 grados, y luego de 180 grados a 0 grados, en un ciclo continuo.
Nota
Si no funciona después de ejecutarlo, o aparece un mensaje de error: "wiringPi.h: No such file or directory", por favor consulta Instalar y verificar WiringPi.
Código
#include <wiringPi.h>
#include <softPwm.h>
#include <stdio.h>
#define ServoPin 1 //define the servo to GPIO1
long Map(long value,long fromLow,long fromHigh,long toLow,long toHigh){
return (toHigh-toLow)*(value-fromLow) / (fromHigh-fromLow) + toLow;
}
void setAngle(int pin, int angle){ //Create a funtion to control the angle of the servo.
if(angle < 0)
angle = 0;
if(angle > 180)
angle = 180;
softPwmWrite(pin,Map(angle, 0, 180, 5, 25));
}
int main(void)
{
int i;
if(wiringPiSetup() == -1){ //when initialize wiring failed,print message to screen
printf("setup wiringPi failed !");
return 1;
}
softPwmCreate(ServoPin, 0, 200); //initialize PMW pin of servo
while(1){
for(i=0;i<181;i++){ // Let servo rotate from 0 to 180. setAngle(ServoPin,i);
delay(2);
}
delay(1000);
for(i=181;i>-1;i--){ // Let servo rotate from 180 to 0. setAngle(ServoPin,i);
delay(2);
}
delay(1000);
}
return 0;
}
Explicación del Código
long Map(long value,long fromLow,long fromHigh,long toLow,long toHigh){
return (toHigh-toLow)*(value-fromLow) / (fromHigh-fromLow) + toLow;
}
Crea una función Map() para mapear valores en el siguiente código.
void setAngle(int pin, int angle){ //Create a funtion to control the angle of the servo.
if(angle < 0)
angle = 0;
if(angle > 180)
angle = 180;
softPwmWrite(pin,Map(angle, 0, 180, 5, 25));
}
Crea una función, setAngle() para escribir el ángulo en el servo.
softPwmWrite(pin, Map(angle, 0, 180, 5, 25));
Esta función puede cambiar el ciclo de trabajo del PWM.
Para hacer que el servo gire de 0 a 180 °, el ancho de pulso debe cambiar
dentro del rango de 0.5ms a 2.5ms cuando el período es de 20ms; en la
función, softPwmCreate(), hemos establecido que el período es
200x100us = 20ms, por lo que necesitamos mapear 0 a 180 a 5x100us a 25x100us.
El prototipo de esta función se muestra a continuación.
int softPwmCreate(int pin, int initialValue, int pwmRange);
pin: Cualquier pin GPIO de Raspberry Pi puede configurarse como pin PWM.initialValue: El ancho de pulso inicial es ese initialValue multiplicado por 100us.pwmRange: el período del PWM es ese pwmRange multiplicado por 100us.
Imagen del Fenómeno