Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte de Expertos: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Previsualizaciones Exclusivas: Obtén acceso anticipado a nuevos anuncios de productos y adelantos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y Sorteos Festivos: Participa en sorteos y promociones navideñas.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
2.2.8 Módulo de Sensor Ultrasónico
Introducción
El sensor ultrasónico utiliza ultrasonidos para detectar objetos con precisión y medir distancias. Envía ondas ultrasónicas y las convierte en señales electrónicas.
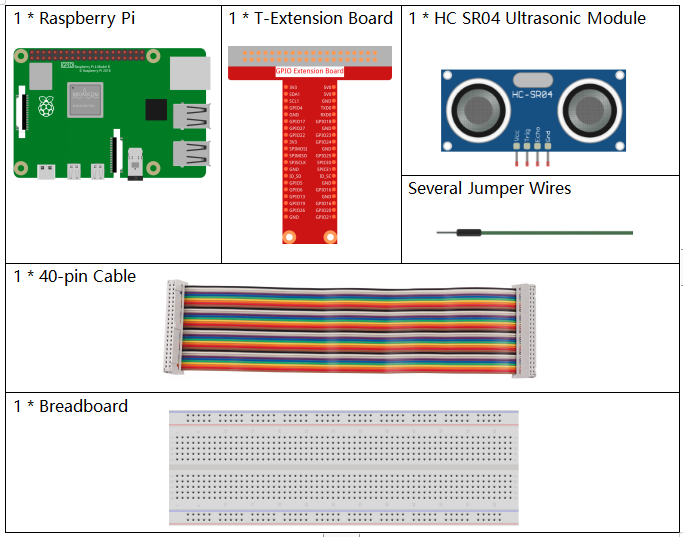
Componentes Necesarios
En este proyecto, necesitamos los siguientes componentes.
Es definitivamente conveniente comprar un kit completo, aquí está el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Raphael |
337 |
También puedes comprarlos por separado en los enlaces a continuación.
INTRODUCCIÓN DE COMPONENTES |
ENLACE DE COMPRA |
|---|---|
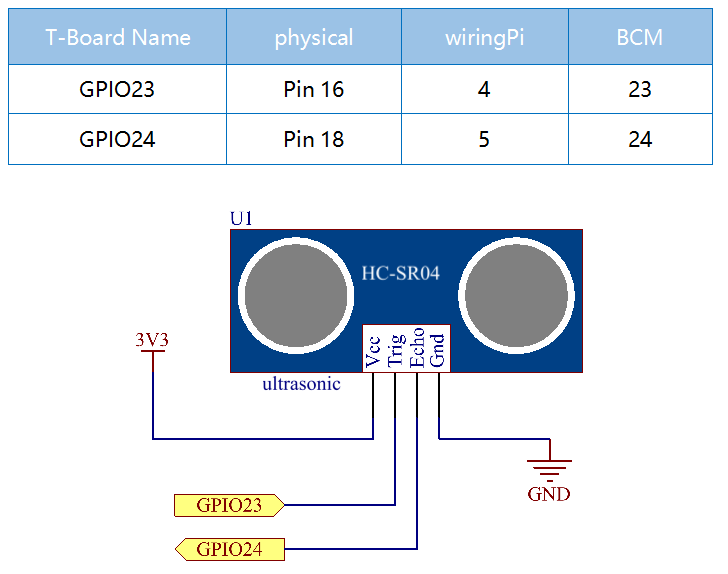
Diagrama Esquemático
Procedimientos Experimentales
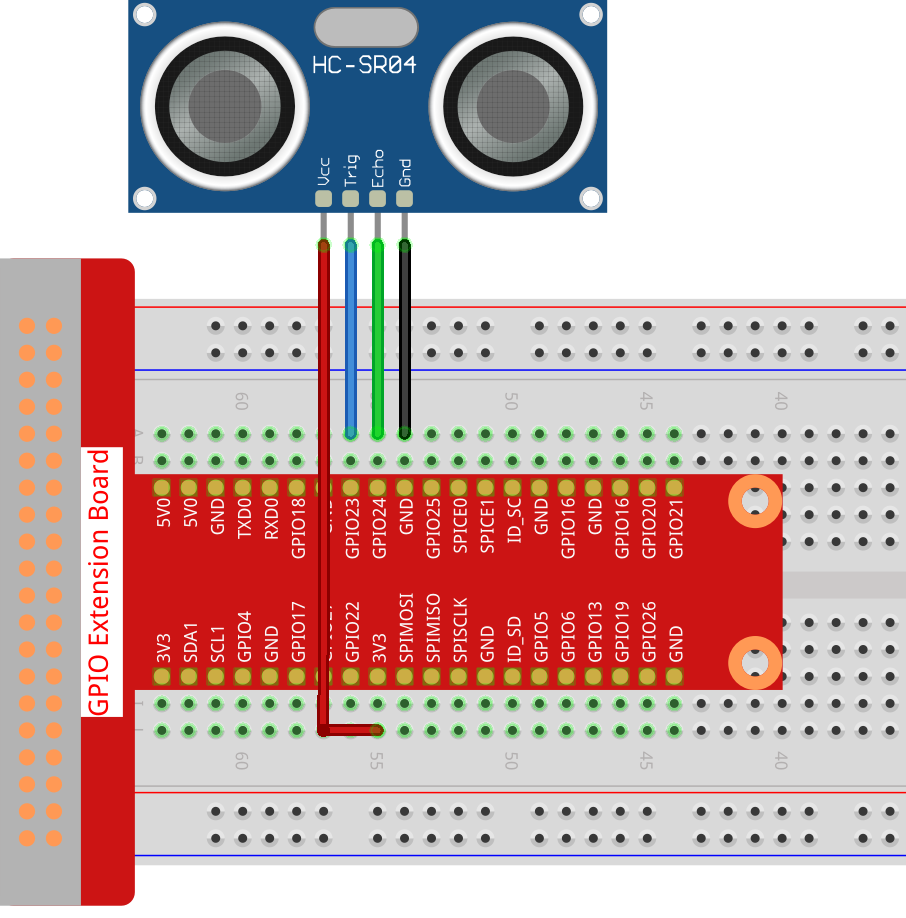
Paso 1: Construir el circuito.
Paso 2: Ir a la carpeta del código.
cd ~/raphael-kit/c/2.2.8/
Paso 3: Compilar el código.
gcc 2.2.8_Ultrasonic.c -lwiringPi
Paso 4: Ejecutar el archivo ejecutable.
sudo ./a.out
Cuando se ejecuta el código, el módulo del sensor ultrasónico detecta la distancia entre el obstáculo delante y el propio módulo, luego el valor de la distancia se imprimirá en la pantalla.
Nota
Si no funciona después de ejecutar, o hay un mensaje de error: "wiringPi.h: No such file or directory", por favor consulta Instalar y verificar WiringPi.
Código
#include <wiringPi.h>
#include <stdio.h>
#include <sys/time.h>
#define Trig 4
#define Echo 5
void ultraInit(void)
{
pinMode(Echo, INPUT);
pinMode(Trig, OUTPUT);
}
float disMeasure(void)
{
struct timeval tv1;
struct timeval tv2;
long time1, time2;
float dis;
digitalWrite(Trig, LOW);
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
while(!(digitalRead(Echo) == 1));
gettimeofday(&tv1, NULL);
while(!(digitalRead(Echo) == 0));
gettimeofday(&tv2, NULL);
time1 = tv1.tv_sec * 1000000 + tv1.tv_usec;
time2 = tv2.tv_sec * 1000000 + tv2.tv_usec;
dis = (float)(time2 - time1) / 1000000 * 34000 / 2;
return dis;
}
int main(void)
{
float dis;
if(wiringPiSetup() == -1){ //when initialize wiring failed,print message to screen
printf("setup wiringPi failed !");
return 1;
}
ultraInit();
while(1){
dis = disMeasure();
printf("%0.2f cm\n\n",dis);
delay(300);
}
return 0;
}
Explicación del Código
void ultraInit(void)
{
pinMode(Echo, INPUT);
pinMode(Trig, OUTPUT);
}
Inicializa el pin del sensor ultrasónico; mientras tanto, configura Echo como entrada y Trig como salida.
float disMeasure(void){};
Esta función se utiliza para realizar la función del sensor ultrasónico calculando la distancia de detección de retorno.
struct timeval tv1;
struct timeval tv2;
Struct timeval es una estructura utilizada para almacenar la hora actual. La estructura completa es la siguiente:
struct timeval
{
__time_t tv_sec; /* Seconds. */
__suseconds_t tv_usec; /* Microseconds. */
};
Aquí, tv_sec representa los segundos que Epoch pasó cuando se creó struct timeval. Tv_usec representa microsegundos o una fracción de segundos.
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
Se está enviando un pulso ultrasónico de 10us.
while(!(digitalRead(Echo) == 1));
gettimeofday(&tv1, NULL);
Este bucle vacío se utiliza para asegurar que cuando se envía la señal de activación, no haya señal de eco interferente y luego obtener la hora actual.
while(!(digitalRead(Echo) == 0));
gettimeofday(&tv2, NULL);
Este bucle vacío se utiliza para asegurar que no se realice el siguiente paso hasta que se reciba la señal de eco y luego obtener la hora actual.
time1 = tv1.tv_sec * 1000000 + tv1.tv_usec;
time2 = tv2.tv_sec * 1000000 + tv2.tv_usec;
Convierte el tiempo almacenado por struct timeval en un tiempo completo en microsegundos.
dis = (float)(time2 - time1) / 1000000 * 34000 / 2;
La distancia se calcula mediante el intervalo de tiempo y la velocidad de propagación del sonido. La velocidad del sonido en el aire es: 34000cm/s.
Foto del Fenómeno
