Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
2.2.8 Ultrasonic Sensor Module
Introduction
The ultrasonic sensor uses ultrasonic to accurately detect objects and measure distances. It sends out ultrasonic waves and converts them into electronic signals.
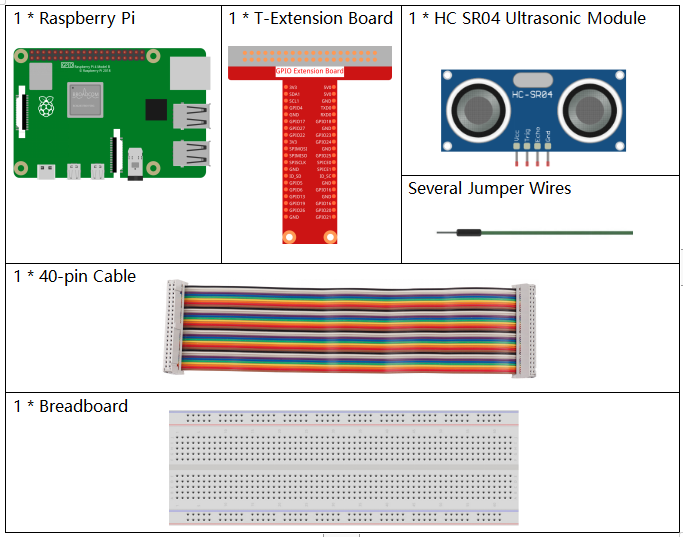
Required Components
In this project, we need the following components.
It’s definitely convenient to buy a whole kit, here’s the link:
Name |
ITEMS IN THIS KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
You can also buy them separately from the links below.
COMPONENT INTRODUCTION |
PURCHASE LINK |
|---|---|
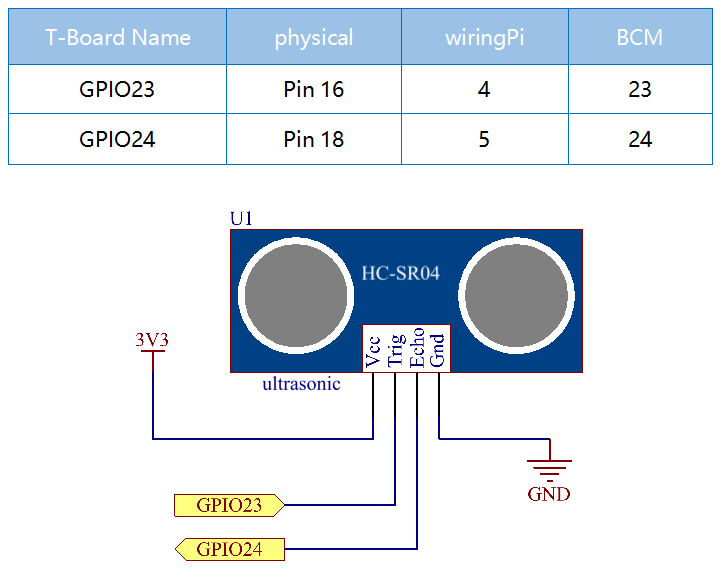
Schematic Diagram
Experimental Procedures
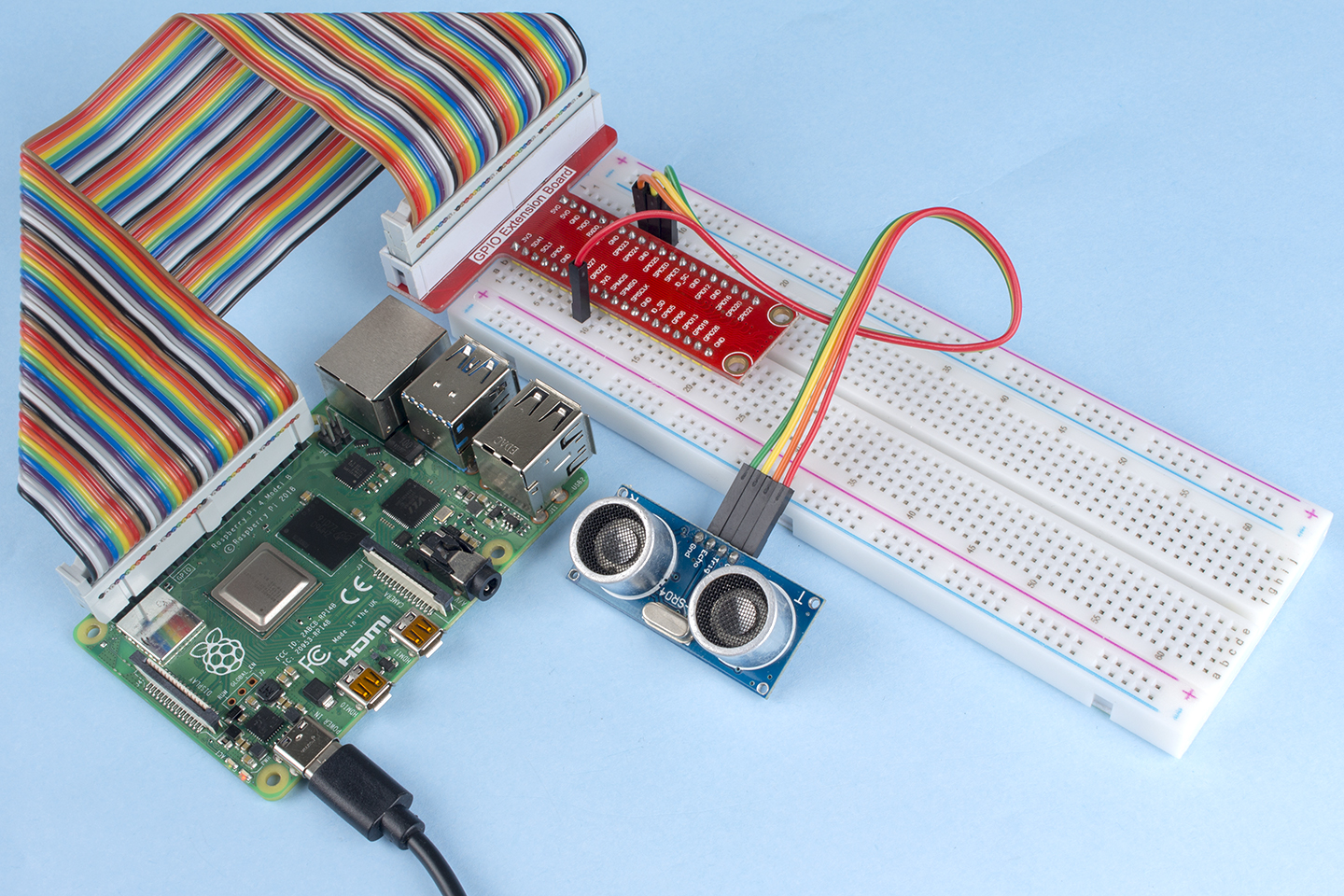
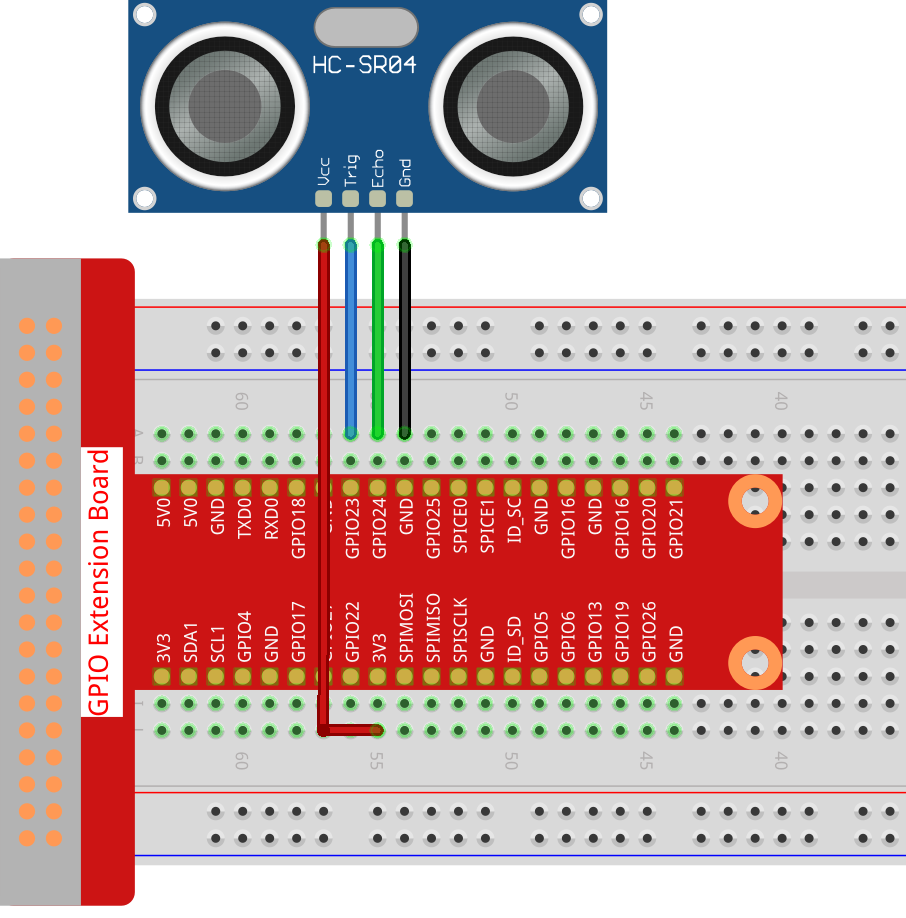
Step 1: Build the circuit.
Step 2: Go to the folder of the code.
cd ~/raphael-kit/nodejs/
Step 3: Run the code.
sudo node ultrasonic_sensor.js
With the code run, the ultrasonic sensor module detects the distance between the obstacle ahead and the module itself, then the distance value will be printed on the screen.
Code
const Gpio = require('pigpio').Gpio;
// The number of microseconds it takes sound to travel 1cm at 20 degrees celcius
const MICROSECDONDS_PER_CM = 1e6/34321;
const trigger = new Gpio(23, {mode: Gpio.OUTPUT});
const echo = new Gpio(24, {mode: Gpio.INPUT, alert: true});
trigger.digitalWrite(0); // Make sure trigger is low
const watchHCSR04 = () => {
let startTick;
echo.on('alert', (level, tick) => {
if (level === 1) {
startTick = tick;
} else {
const endTick = tick;
const diff = (endTick >> 0) - (startTick >> 0); // Unsigned 32 bit arithmetic
console.log(diff / 2 / MICROSECDONDS_PER_CM);
}
});
};
watchHCSR04();
// Trigger a distance measurement once per second
setInterval(() => {
trigger.trigger(10, 1); // Set trigger high for 10 microseconds
}, 1000);
Code Explanation
The trigger function can be used to generate a pulse on a GPIO and
alerts can be used to determine the time of a GPIO state change
accurate to a few microseconds.
These two features can be combined to measure distance using a HC-SR04 ultrasonic sensor.
setInterval(() => {
trigger.trigger(10, 1); // Set trigger high for 10 microseconds
}, 1000);
This is to periodically send out a 10us ultrasonic pulse.
const watchHCSR04 = () => {
echo.on('alert', (level, tick) => {
if (level === 1) {
startTick = tick;
} else {
const endTick = tick;
const diff = (endTick >> 0) - (startTick >> 0); // Unsigned 32 bit arithmetic
console.log(diff / 2 / MICROSECDONDS_PER_CM);
}
});
};
This function sets an alert that will record the time between sending the pulse (level is 1) and receiving the echo (level is 0). By multiplying the time difference by the speed of sound (and dividing by 2), you can get the distance to the obstacle ahead.
Phenomenon Picture