Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
2.1.5 Neigungsschalter
Einführung
Dies ist ein Kugel-Neigungsschalter mit einer Metallkugel im Inneren. Er dient zur Erkennung von Neigungen in einem kleinen Winkel.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
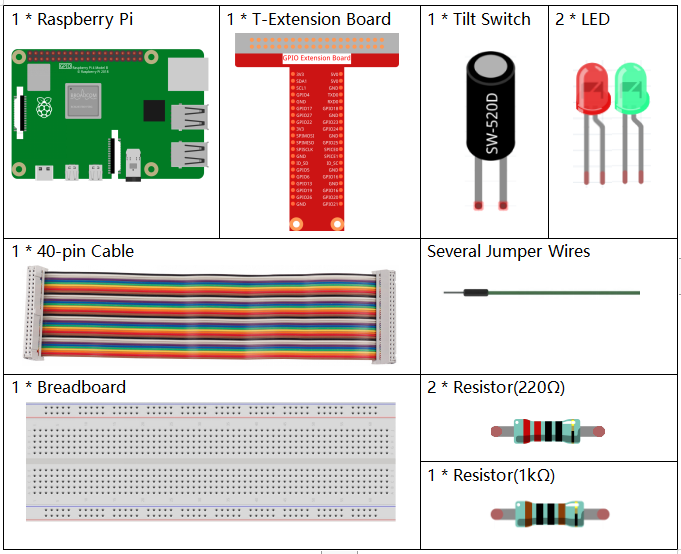
Es ist definitiv praktisch, ein komplettes Set zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
Sie können sie auch einzeln über die untenstehenden Links kaufen.
KOMPONENTENBESCHREIBUNG |
KAUF-LINK |
|---|---|
- |
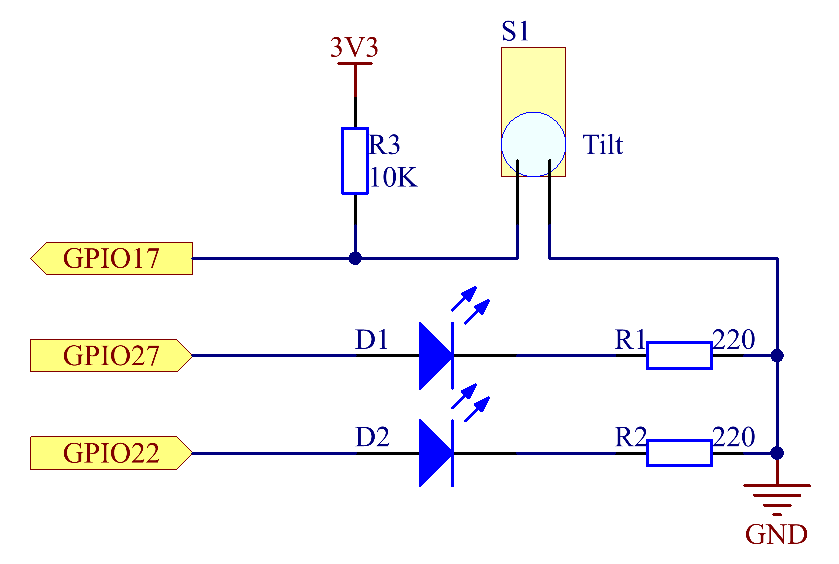
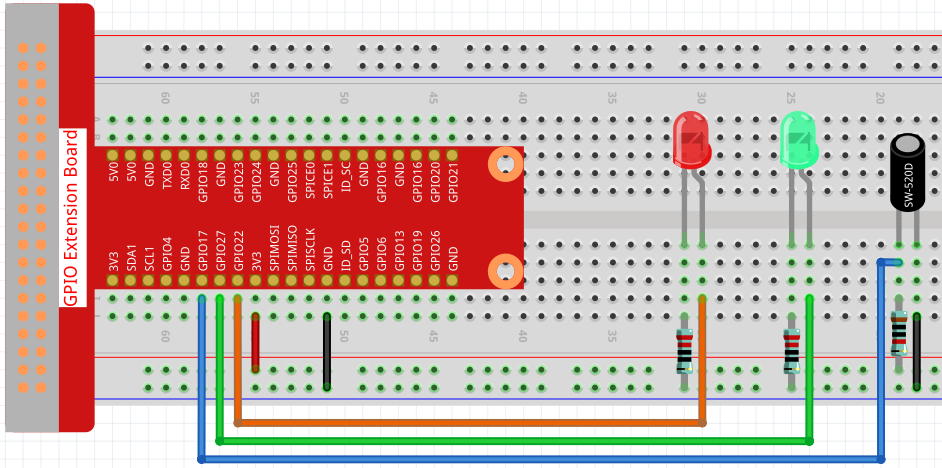
Schaltplan
Experimentelle Verfahren
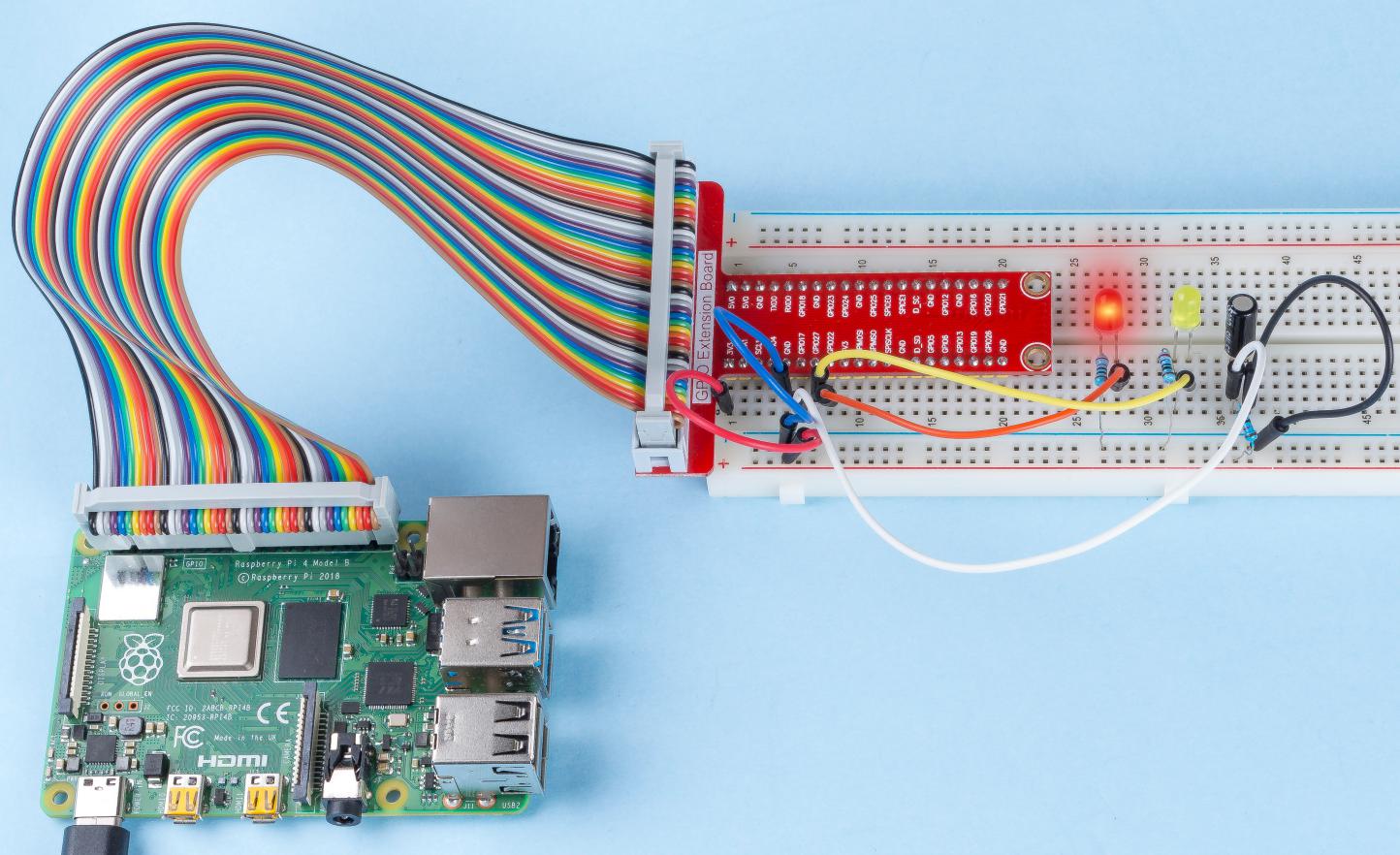
Schritt 1: Schaltung aufbauen.
Schritt 2: Verzeichnis wechseln.
cd ~/raphael-kit/python/
Schritt 3: Starten.
sudo python3 2.1.5_Tilt.py
Stellen Sie den Neigungsschalter vertikal auf, und die grüne LED wird eingeschaltet. Wenn Sie ihn neigen, wird „Tilt!“ auf dem Bildschirm angezeigt und die rote LED wird eingeschaltet. Stellen Sie ihn wieder vertikal auf, und die grüne LED leuchtet wieder auf.
Code
Bemerkung
Sie können den untenstehenden Code ändern/zurücksetzen/kopieren/ausführen/stoppen. Aber bevor Sie das tun, müssen Sie zum Quellcode-Pfad wie raphael-kit/python navigieren. Nachdem Sie den Code geändert haben, können Sie ihn direkt ausführen, um das Ergebnis zu sehen.
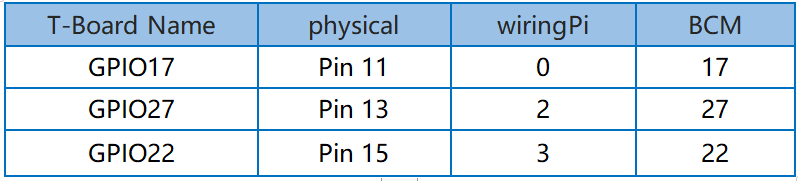
import RPi.GPIO as GPIO
TiltPin = 17
Gpin = 27
Rpin = 22
def setup():
GPIO.setmode(GPIO.BCM) # Numbers GPIOs by physical location
GPIO.setup(Gpin, GPIO.OUT) # Set Green Led Pin mode to output
GPIO.setup(Rpin, GPIO.OUT) # Set Red Led Pin mode to output
GPIO.setup(TiltPin, GPIO.IN, pull_up_down=GPIO.PUD_UP) # Set BtnPin's mode is input, and pull up to high level(3.3V)
GPIO.add_event_detect(TiltPin, GPIO.BOTH, callback=detect, bouncetime=200)
def Led(x):
if x == 0:
GPIO.output(Rpin, 1)
GPIO.output(Gpin, 0)
if x == 1:
GPIO.output(Rpin, 0)
GPIO.output(Gpin, 1)
def Print(x):
if x == 0:
print (' *************')
print (' * Tilt! *')
print (' *************')
def detect(chn):
Led(GPIO.input(TiltPin))
Print(GPIO.input(TiltPin))
def loop():
while True:
pass
def destroy():
GPIO.output(Gpin, GPIO.HIGH) # Green led off
GPIO.output(Rpin, GPIO.HIGH) # Red led off
GPIO.cleanup() # Release resource
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the program destroy() will be executed.
destroy()
Code-Erklärung
GPIO.add_event_detect(TiltPin, GPIO.BOTH, callback=detect, bouncetime=200)
Richte eine Erkennung am TiltPin ein und rufe die Callback-Funktion zur Erkennung auf.
def Led(x):
if x == 0:
GPIO.output(Rpin, 1)
GPIO.output(Gpin, 0)
if x == 1:
GPIO.output(Rpin, 0)
GPIO.output(Gpin, 1)
Definiere eine Funktion Led(), um die beiden LEDs ein- oder auszuschalten. Wenn x=0, leuchtet die rote LED; ansonsten wird die grüne LED eingeschaltet.
def Print(x):
if x == 0:
print (' *************')
print (' * Tilt! *')
print (' *************')
Erstelle eine Funktion, Print(), um die obigen Zeichen auf dem Bildschirm anzuzeigen.
def detect(chn):
Led(GPIO.input(TiltPin))
Print(GPIO.input(TiltPin))
Definiere eine Callback-Funktion für die Neigungsrückmeldung. Hole den gelesenen Wert des Neigungsschalters, dann steuert die Funktion Led() das Ein- oder Ausschalten der beiden LEDs, abhängig vom gelesenen Wert des Neigungsschalters.
Phänomen-Bild