Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
2.2.9 MPU6050 Modul
Einführung
Das MPU-6050 ist das weltweit erste und einzige 6-Achsen-Bewegungserfassungsgerät (3-Achsen-Gyroskop und 3-Achsen-Beschleunigungsmesser) konzipiert für Smartphones, Tablets und tragbare Sensoren, die diese Merkmale aufweisen, einschließlich niedriger Energieverbrauch, geringe Kosten und hohe Leistungsanforderungen.
In diesem Experiment verwenden wir I2C, um die Werte des Drei-Achsen-Beschleunigungssensors und des Drei-Achsen-Gyroskops für den MPU6050 zu erhalten und sie auf dem Bildschirm anzuzeigen.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
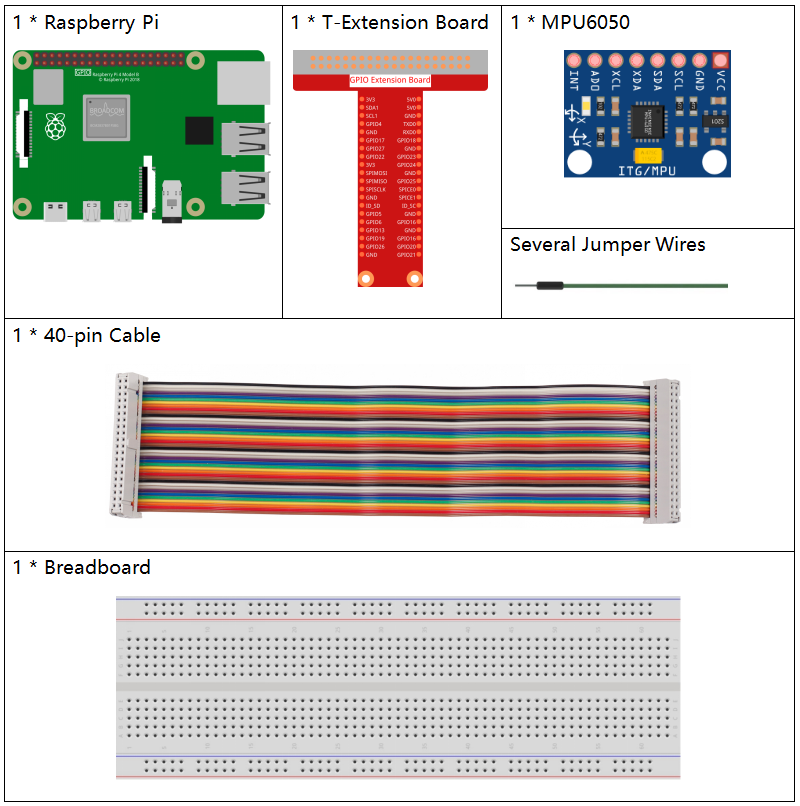
Es ist definitiv praktisch, ein ganzes Kit zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
Sie können sie auch separat über die untenstehenden Links kaufen.
KOMPONENTENBESCHREIBUNG |
KAUF-LINK |
|---|---|
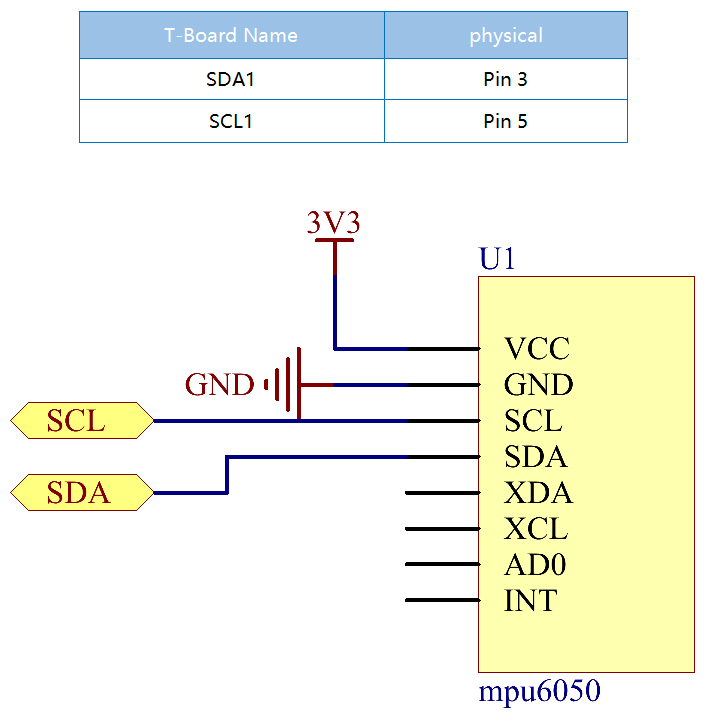
Schaltplan
Der MPU6050 kommuniziert über die I2C-Busschnittstelle mit dem Mikrocontroller. Die Anschlüsse SDA1 und SCL1 müssen mit den entsprechenden Pins verbunden werden.
Experimentelle Verfahren
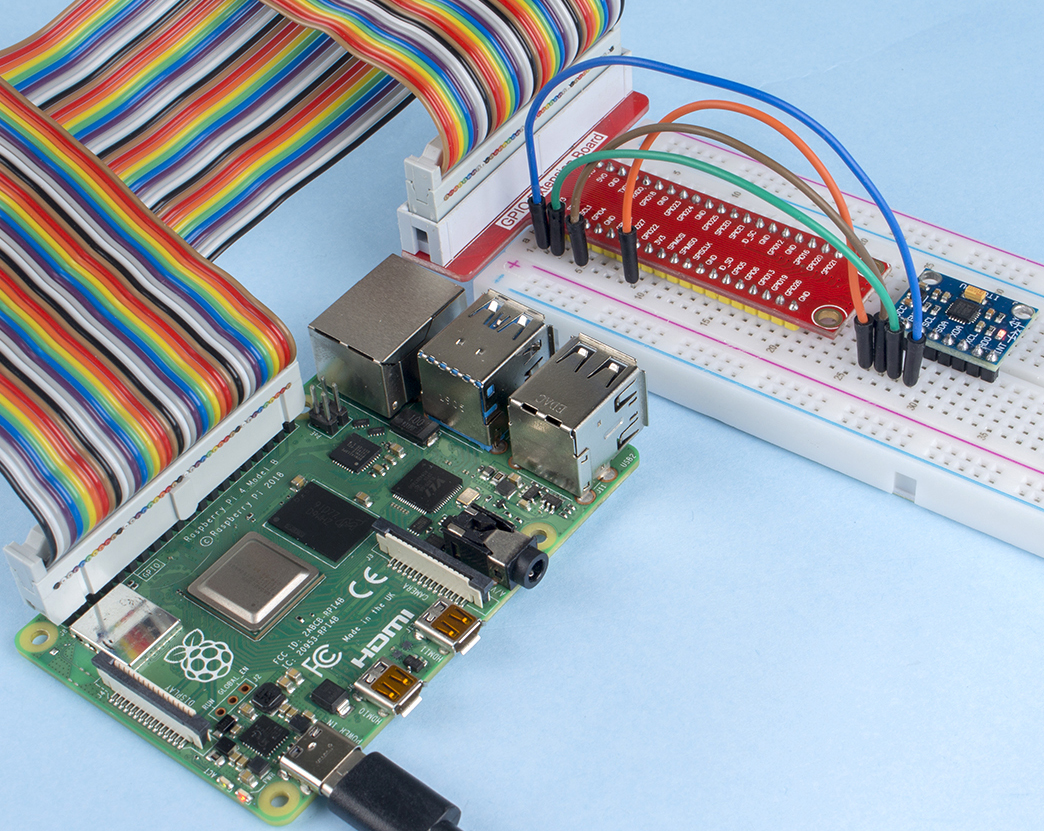
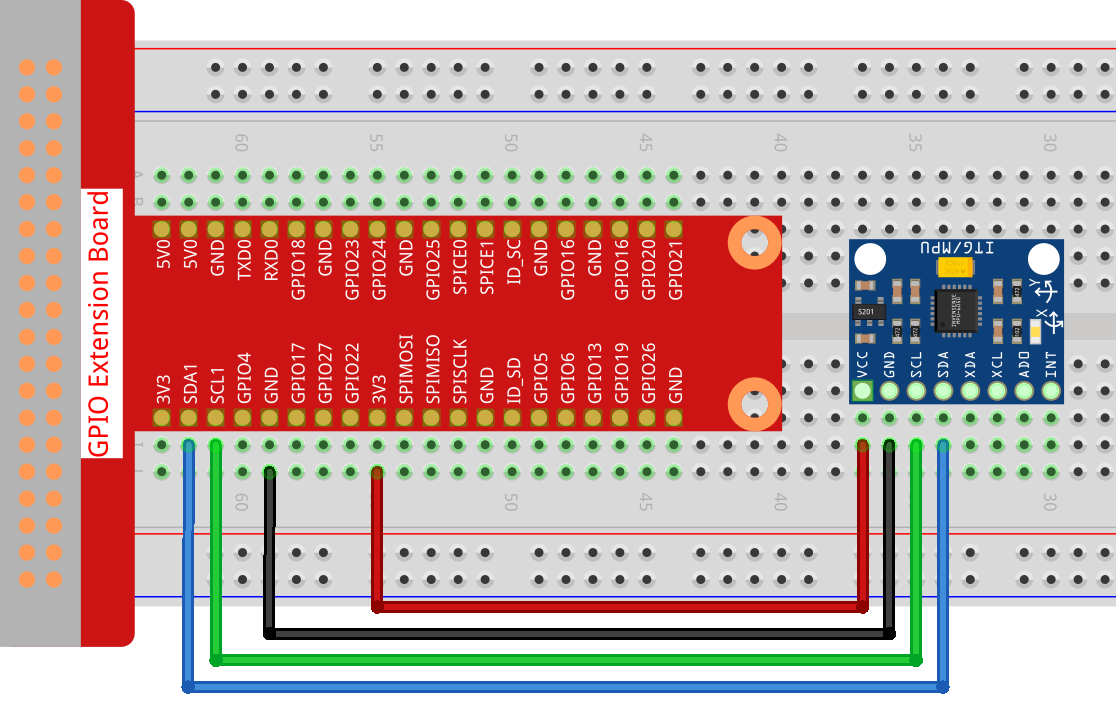
Schritt 1: Schaltung aufbauen.
Schritt 2: I2C einrichten (siehe Anhang I²C-Konfiguration. Wenn Sie I2C bereits eingerichtet haben, überspringen Sie diesen Schritt.)
Schritt 3: Wechseln Sie in den Ordner mit dem Code.
cd ~/raphael-kit/c/2.2.9/
Schritt 4: Kompilieren Sie den Code.
gcc 2.2.9_mpu6050.c -lwiringPi -lm
Schritt 5: Führen Sie die ausführbare Datei aus.
sudo ./a.out
Mit dem ausgeführten Code werden der Ablenkwinkel der x- und y-Achse sowie die Beschleunigung und die Winkelgeschwindigkeit jeder Achse, die vom MPU6050 gelesen werden, nach der Berechnung auf dem Bildschirm angezeigt.
Bemerkung
Falls der Fehler
wiringPi.h: No such file or directoryangezeigt wird, beachten Sie bitte Installieren und Überprüfen von WiringPi.Wenn der Fehler
Unable to open I2C device: No such file or directoryauftritt, beziehen Sie sich auf I²C-Konfiguration, um I2C zu aktivieren und überprüfen Sie, ob die Verkabelung korrekt ist.
Code
#include <wiringPiI2C.h>
#include <wiringPi.h>
#include <stdio.h>
#include <math.h>
int fd;
int acclX, acclY, acclZ;
int gyroX, gyroY, gyroZ;
double acclX_scaled, acclY_scaled, acclZ_scaled;
double gyroX_scaled, gyroY_scaled, gyroZ_scaled;
int read_word_2c(int addr)
{
int val;
val = wiringPiI2CReadReg8(fd, addr);
val = val << 8;
val += wiringPiI2CReadReg8(fd, addr+1);
if (val >= 0x8000)
val = -(65536 - val);
return val;
}
double dist(double a, double b)
{
return sqrt((a*a) + (b*b));
}
double get_y_rotation(double x, double y, double z)
{
double radians;
radians = atan2(x, dist(y, z));
return -(radians * (180.0 / M_PI));
}
double get_x_rotation(double x, double y, double z)
{
double radians;
radians = atan2(y, dist(x, z));
return (radians * (180.0 / M_PI));
}
int main()
{
fd = wiringPiI2CSetup (0x68);
wiringPiI2CWriteReg8 (fd,0x6B,0x00);//disable sleep mode
printf("set 0x6B=%X\n",wiringPiI2CReadReg8 (fd,0x6B));
while(1) {
gyroX = read_word_2c(0x43);
gyroY = read_word_2c(0x45);
gyroZ = read_word_2c(0x47);
gyroX_scaled = gyroX / 131.0;
gyroY_scaled = gyroY / 131.0;
gyroZ_scaled = gyroZ / 131.0;
//Print values for the X, Y, and Z axes of the gyroscope sensor.
printf("My gyroX_scaled: %f\n", gyroY X_scaled);
printf("My gyroY_scaled: %f\n", gyroY Y_scaled);
printf("My gyroZ_scaled: %f\n", gyroY Z_scaled);
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
//Print the X, Y, and Z values of the acceleration sensor.
printf("My acclX_scaled: %f\n", acclX_scaled);
printf("My acclY_scaled: %f\n", acclY_scaled);
printf("My acclZ_scaled: %f\n", acclZ_scaled);
printf("My X rotation: %f\n", get_x_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
printf("My Y rotation: %f\n", get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
delay(100);
}
return 0;
}
Code-Erklärung
int read_word_2c(int addr)
{
int val;
val = wiringPiI2CReadReg8(fd, addr);
val = val << 8;
val += wiringPiI2CReadReg8(fd, addr+1);
if (val >= 0x8000)
val = -(65536 - val);
return val;
}
Sensorwerte aus MPU6050 auslesen.
double get_y_rotation(double x, double y, double z)
{
double radians;
radians = atan2(x, dist(y, z));
return -(radians * (180.0 / M_PI));
}
Hierbei erhalten wir den Ablenkwinkel auf der Y-Achse.
double get_x_rotation(double x, double y, double z)
{
double radians;
radians = atan2(y, dist(x, z));
return (radians * (180.0 / M_PI));
}
Berechnen des Ablenkwinkels der X-Achse.
gyroX = read_word_2c(0x43);
gyroY = read_word_2c(0x45);
gyroZ = read_word_2c(0x47);
gyroX_scaled = gyroX / 131.0;
gyroY_scaled = gyroY / 131.0;
gyroZ_scaled = gyroZ / 131.0;
//Print values for the X, Y, and Z axes of the gyroscope sensor.
printf("My gyroX_scaled: %f\n", gyroY X_scaled);
printf("My gyroY_scaled: %f\n", gyroY Y_scaled);
printf("My gyroZ_scaled: %f\n", gyroY Z_scaled);
Die Werte der x-, y- und z-Achse am Gyroskopsensor auslesen, die Metadaten in Winkelgeschwindigkeitswerte umwandeln und dann ausgeben.
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
//Print the X, Y, and Z values of the acceleration sensor.
printf("My acclX_scaled: %f\n", acclX_scaled);
printf("My acclY_scaled: %f\n", acclY_scaled);
printf("My acclZ_scaled: %f\n", acclZ_scaled);
Werte der x-, y- und z-Achse am Beschleunigungssensor auslesen, die Metadaten in beschleunigte Geschwindigkeitswerte (Gravitätseinheit) umwandeln und dann ausgeben.
printf("My X rotation: %f\n", get_x_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
printf("My Y rotation: %f\n", get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
Ablenkwinkel der x- und y-Achse ausgeben.
Phänomen-Bild