Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
2.2.6 Geschwindigkeitssensormodul
Einführung
In diesem Projekt werden wir den Gebrauch des Geschwindigkeitssensormoduls erlernen. Ein Geschwindigkeitssensormodul ist eine Art von Drehzahlmesser, der zur Messung der Geschwindigkeit eines rotierenden Objekts, wie eines Motors, verwendet wird.
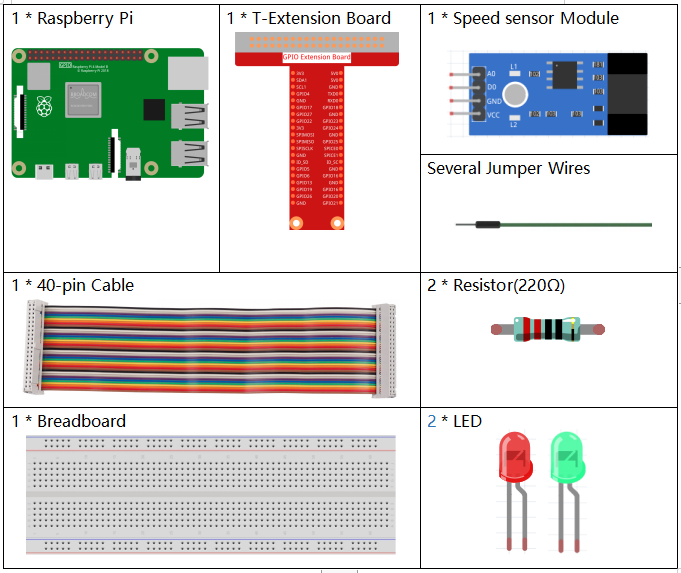
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein komplettes Kit zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
Sie können diese auch einzeln über die untenstehenden Links kaufen.
KOMPONENTENBESCHREIBUNG |
KAUF LINK |
|---|---|
- |
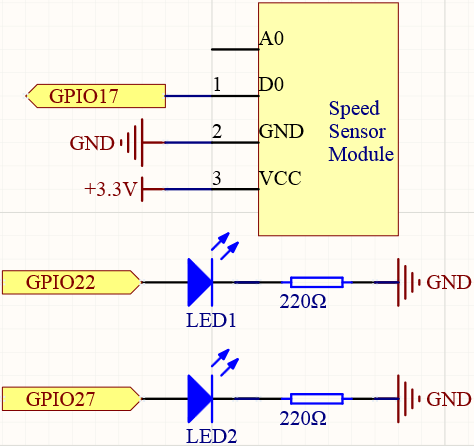
Schaltplan
Experimentelle Verfahren
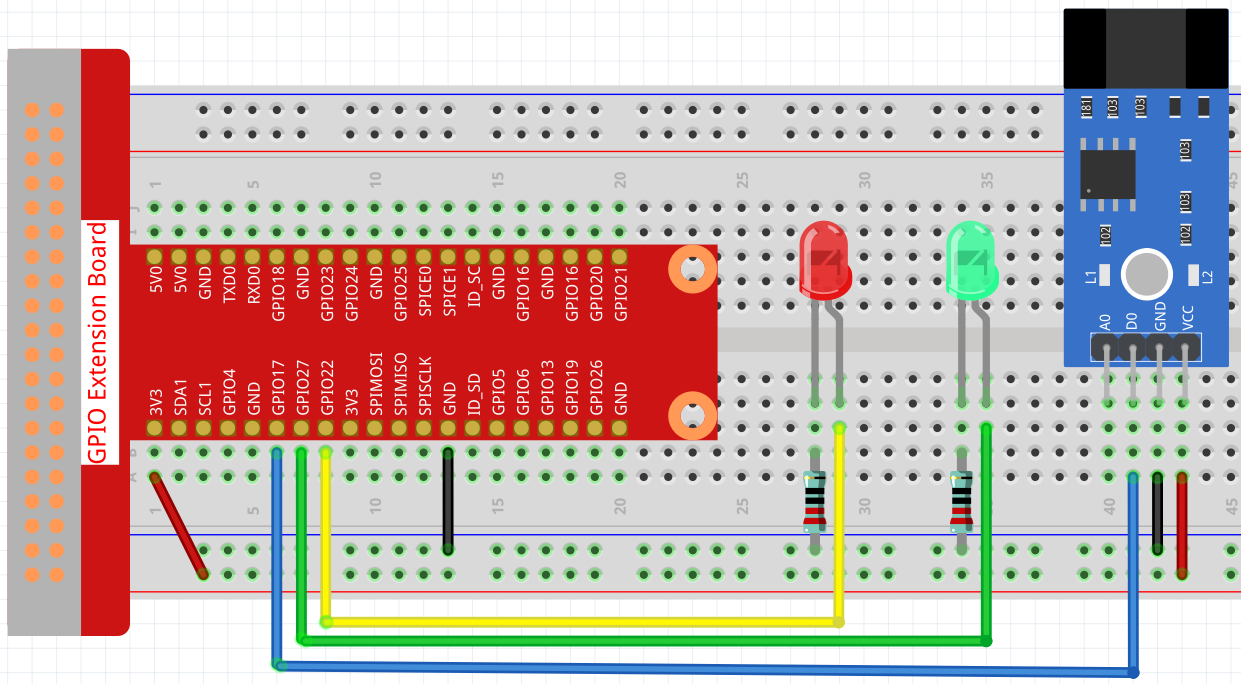
Schritt 1: Bauen Sie den Schaltkreis.
Schritt 2: Verzeichnis wechseln.
cd ~/raphael-kit/c/2.2.6/
Schritt 3: Kompilieren.
gcc 2.2.6_speed_sensor_module.c -lwiringPi
Schritt 4: Ausführen.
sudo ./a.out
Nachdem der Code ausgeführt wurde, leuchtet die grüne LED. Wenn Sie ein Hindernis in den Spalt des Geschwindigkeitssensormoduls stellen, wird „Licht blockiert“ auf dem Bildschirm angezeigt und die rote LED leuchtet. Entfernen Sie das Hindernis und die grüne LED leuchtet wieder.
Bemerkung
Wenn es nach dem Ausführen nicht funktioniert oder eine Fehlermeldung angezeigt wird: "wiringPi.h: Datei oder Verzeichnis nicht gefunden", beziehen Sie sich bitte auf Installieren und Überprüfen von WiringPi.
Code
#include <wiringPi.h>
#include <stdio.h>
#define speedPin 0
#define Gpin 2
#define Rpin 3
void LED(int color)
{
pinMode(Gpin, OUTPUT);
pinMode(Rpin, OUTPUT);
if (color == 0){
digitalWrite(Rpin, HIGH);
digitalWrite(Gpin, LOW);
}
else if (color == 1){
digitalWrite(Rpin, LOW);
digitalWrite(Gpin, HIGH);
}
}
void Print(int x){
if ( x == 0 ){
printf("Light was blocked\n");
}
}
int main(void){
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen
printf("setup wiringPi failed !");
return 1;
}
pinMode(speedPin, INPUT);
int temp;
while(1){
//Reverse the input of speedPin
if ( digitalRead(speedPin) == 0 ){
temp = 1;
}
if ( digitalRead(speedPin) == 1 ){
temp = 0;
}
LED(temp);
Print(temp);
}
return 0;
}
Code-Erklärung
void LED(int color)
{
pinMode(Gpin, OUTPUT);
pinMode(Rpin, OUTPUT);
if (color == 0){
digitalWrite(Rpin, HIGH);
digitalWrite(Gpin, LOW);
}
else if (color == 1){
digitalWrite(Rpin, LOW);
digitalWrite(Gpin, HIGH);
}
}
Stellen Sie eine LED() Funktion bereit, um die 2 LEDs zu steuern. Der Parameter dieser Funktion ist color.
Wenn color 0 ist, setzen Sie Rpin auf HIGH (schalten Sie die rote LED ein) und Gpin auf LOW (schalten Sie die grüne LED aus); wenn color 1 ist, schalten Sie die grüne LED ein und die rote LED aus.
while(1){
//Reverse the input of speedPin
if ( digitalRead(speedPin) == 0 ){
temp = 1;
}
if ( digitalRead(speedPin) == 1 ){
temp = 0;
}
LED(temp);
Print(temp);
}
Wenn Sie ein Hindernis in den Spalt des Geschwindigkeitssensormoduls stellen, ist speedPin auf niedrigem Pegel (0), dann rufen Sie die LED(1) Funktion auf, um die grüne LED einzuschalten, und es wird „Licht wurde blockiert!“ ausgedruckt.
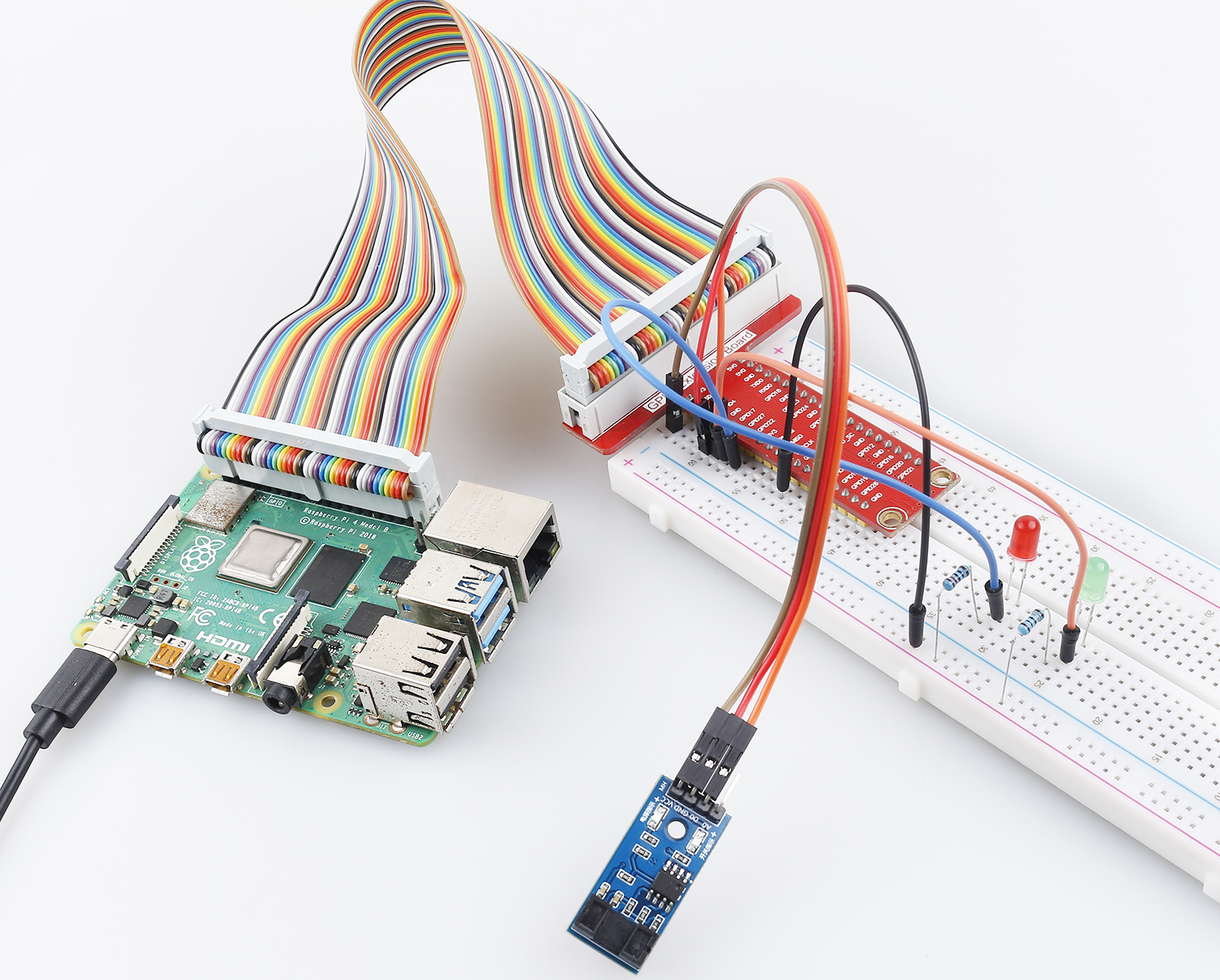
Phänomen-Bild