颜色检测¶
帕克是一款内置摄像头的自动驾驶汽车,它允许 EzBlock 程序利用物体检测和颜色识别代码。 在本节中,EzBlock 将用于创建颜色检测程序。
备注
在尝试本部分之前,请确保树莓派相机的 FFC 电缆已正确且牢固地连接。
在这个程序中,EzBlock首先会被告知待检测颜色的HSV(Hue-Saturation-Value)空间范围,然后利用OpenCV对HSV范围内的颜色进行处理去除背景噪声,最后对匹配颜色进行框选。
EzBlock 包括帕克的 6 种颜色模型,“红色”、“橙色”、“黄色”、“绿色”、“蓝色”和“紫色”。 色卡已在以下 PDF 中准备好,需可以下载下来打印。

备注
由于打印机碳粉或打印介质(如棕褐色纸)的不同,打印颜色可能与颜色模型的色调略有不同。这可能会导致不太准确的颜色识别。
提示

从远程控制页面拖动视频小部件,它将生成一个视频监视器。

点击视频监视器将会出现属性框,你可以在这里调节它的大小。

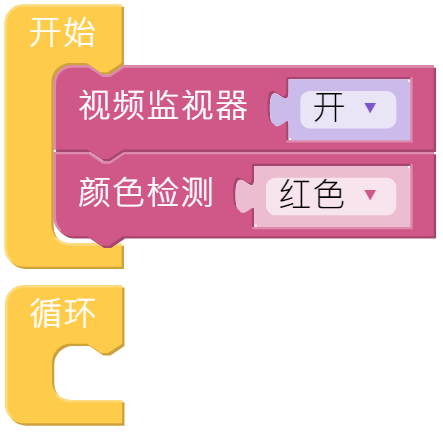
通过将 视频监视器 块设置为 开 来启用视频监视器。 注意:将 视频监视器 设置为 关 将关闭监视器,但对象检测仍然可用。

使用 颜色检测 块来启用颜色检测。 注意:一次只能检测一种颜色。
示例
备注
你可以直接打开我们提供的示例或者是按照下图来编写程序,详细教程请参考 打开或新建项目.
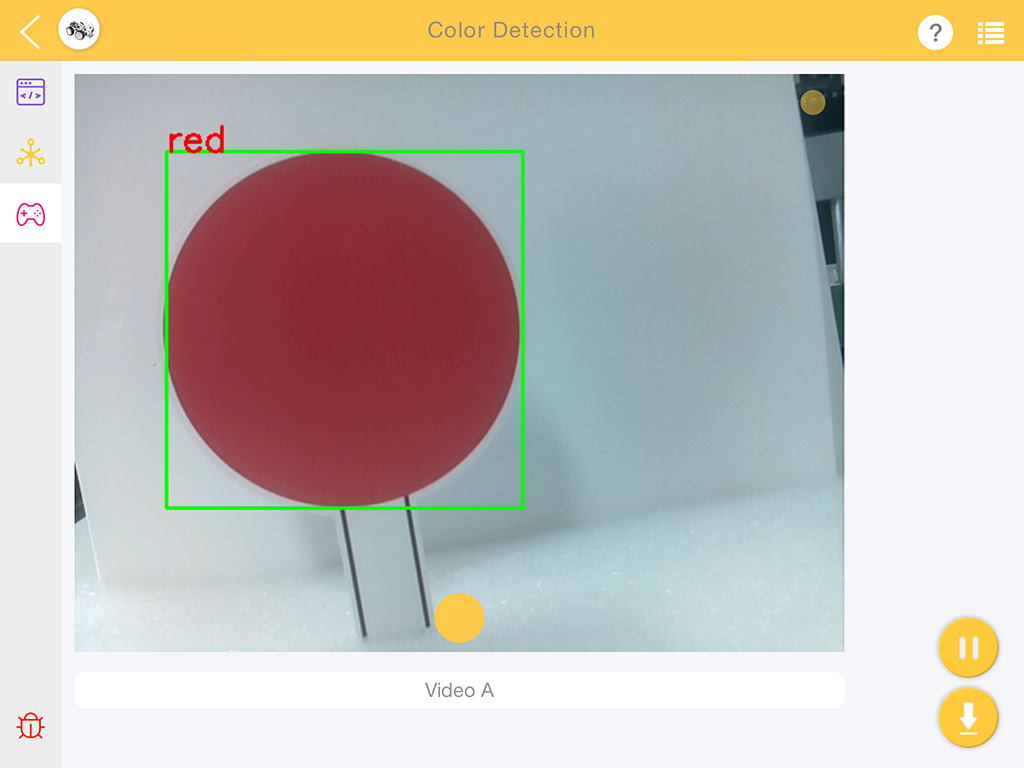
代码运行后,进入到远程控制界面,你将看到摄像头拍摄的画面,并且将红色物体框选出来。