疑难解答¶
当使用VNC时,我被提示桌面暂时无法显示?¶
在终端,输入
sudo raspi-config来改变分辨率。
安装EzBlock操作系统后,舵机不能转到0°?¶
检查伺服电缆是否正确连接,Robot HAT的电源是否打开。
按下复位按钮。
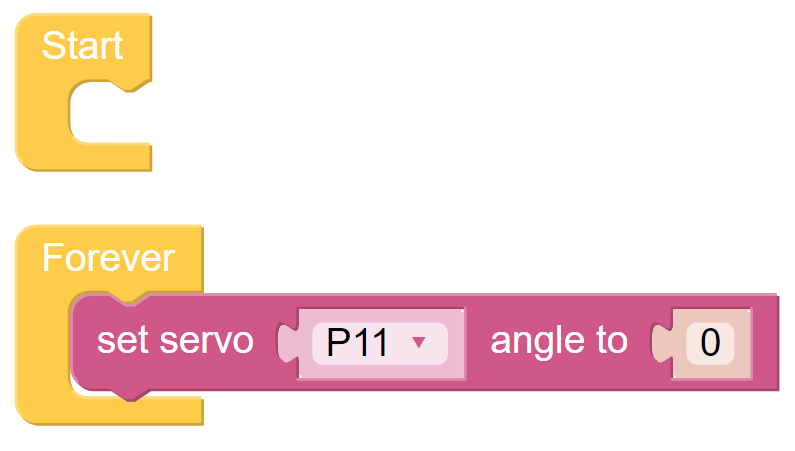
如果您已经在EzBlock Studio中运行了程序,那么P11的自定义程序就不再可用。您可以参考下图,在EzBlock Studio中手动编写程序,将伺服角度设置为0。
如何在EzBlock重新校准机器人¶
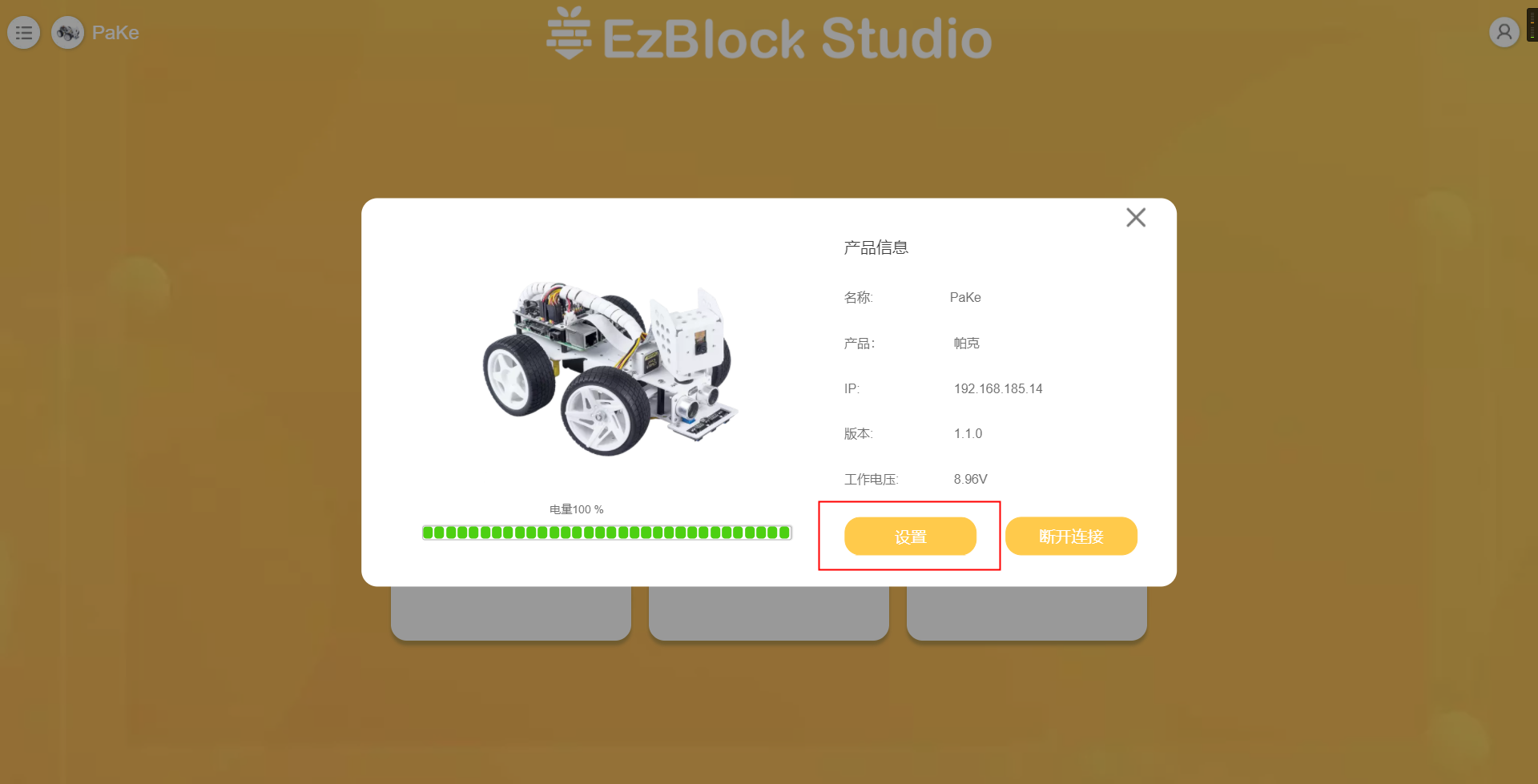
在首页,点击左上角的产品连接图标。

进入到产品页面之后,点击 设置 按钮。
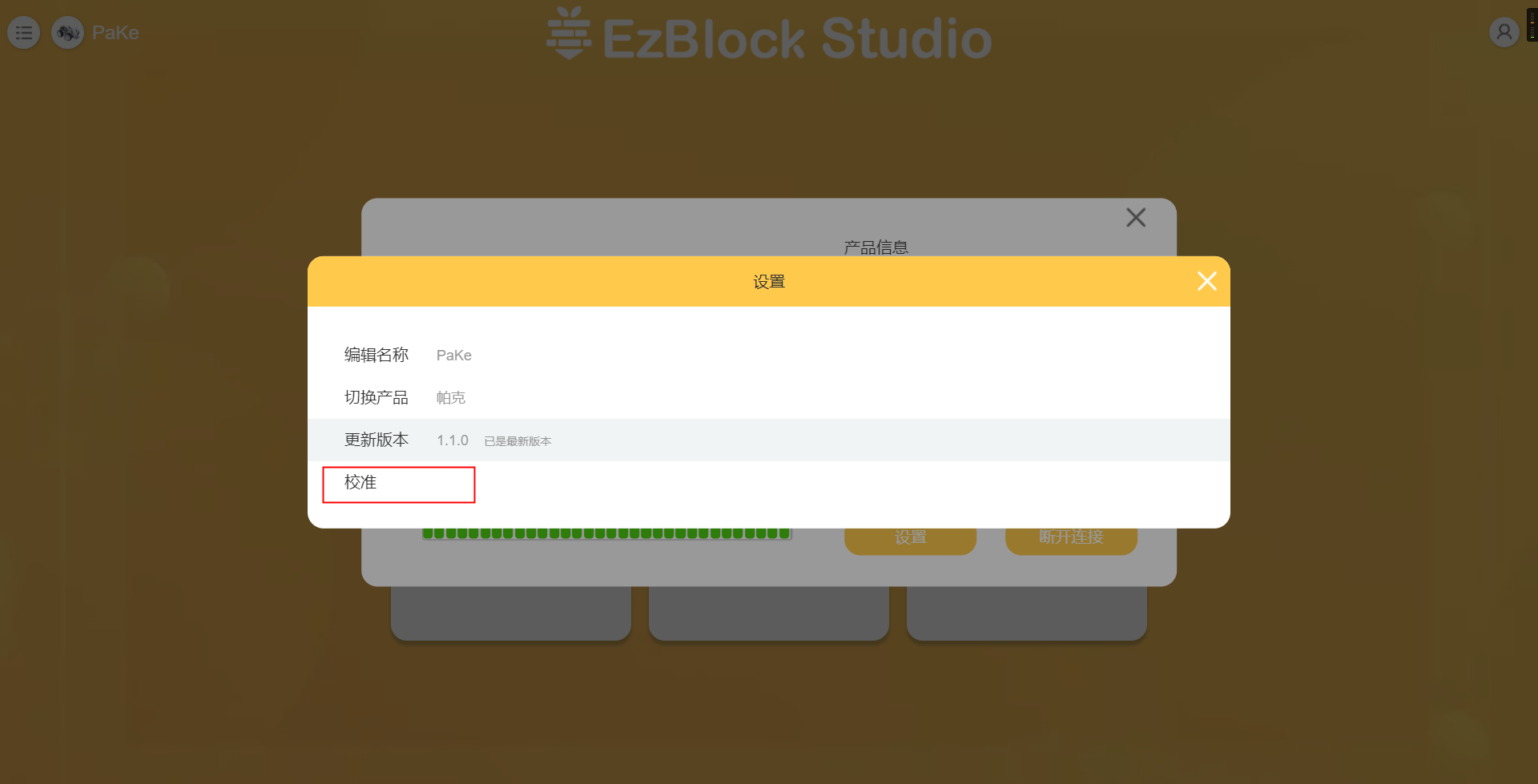
进入设置页面后,点击 校准 按钮就能进入到校准页面,然后按照提示来校准。
EzBlock无法连接蓝牙?¶
先检查是否有给你的SD卡烧录 安装EzBlock镜像。
打开产品的电源开关后,等蓝牙指示灯变得更亮并且出现"zi~"声后,代表树莓派成功启动,此时再去连接。
检查您的移动设备的蓝牙是否打开。
检查EzBlock是否被允许访问设备的位置。
有些移动设备还需要打开位置服务。
检查电池电量。如果两个电源指示灯都关闭,或者只有一个指示灯在闪烁;电源电量低,请给电池充电。
如果以上方法都试过了,请尝试按下RST按钮,或重新启动产品和APP。
APP搜索到蓝牙,但无法连接¶
先检查是否有给你的SD卡烧录 安装EzBlock镜像。
打开产品的电源开关后,等蓝牙指示灯变得更亮并且出现"zi~"声后,代表树莓派成功启动,此时再去连接。
检查ROBOT HAT上的BLE或USR灯是否一直亮着(这意味着产品被其他设备连接),如果是,请断开其他设备的连接或重新启动产品。
如果以上方法都试过了,请尝试按下RST按钮,或者重新启动产品和APP。
配置WIFI后APP无法连接¶
检查国家、账号和密码是否正确。
检查该WIFI的网络状态。
检查电源电量。如果两个电源指示灯都熄灭或只有一个电源指示灯闪烁,则说明电源电量不足,请给电池充电。
检查配置的WiFi和移动设备连接的WiFi是否相同。
为什么伺服机有时会无缘无故地返回到中间位置?¶
当舵机被结构物或其他物体挡住,无法到达预定位置时,舵机会进入断电保护模式,以防止舵机被过大的电流烧坏。
断电一段时间后,如果没有给伺服机提供PWM信号,伺服机将自动恢复到原来的位置。