Let PiCar-X Move¶
This is the first project, let’s test the basic movement of Picar-X.
Run the Code
cd /home/pi/picar-x/example
sudo python3 move.py
After running the code, PiCar-X will move forward, turn in an S-shape, stop and shake its head.
Code
Note
You can Modify/Reset/Copy/Run/Stop the code below. But before that, you need to go to source code path like picar-x/example. After modifying the code, you can run it directly to see the effect.
import sys
sys.path.append(r'/home/pi/picar-x/lib')
from utils import reset_mcu
reset_mcu()
from picarx import Picarx
import time
if __name__ == "__main__":
try:
px = Picarx()
px.forward(30)
time.sleep(0.5)
for angle in range(0,35):
px.set_dir_servo_angle(angle)
time.sleep(0.01)
for angle in range(35,-35,-1):
px.set_dir_servo_angle(angle)
time.sleep(0.01)
for angle in range(-35,0):
px.set_dir_servo_angle(angle)
time.sleep(0.01)
px.forward(0)
time.sleep(1)
for angle in range(0,35):
px.set_camera_servo1_angle(angle)
time.sleep(0.01)
for angle in range(35,-35,-1):
px.set_camera_servo1_angle(angle)
time.sleep(0.01)
for angle in range(-35,0):
px.set_camera_servo1_angle(angle)
time.sleep(0.01)
for angle in range(0,35):
px.set_camera_servo2_angle(angle)
time.sleep(0.01)
for angle in range(35,-35,-1):
px.set_camera_servo2_angle(angle)
time.sleep(0.01)
for angle in range(-35,0):
px.set_camera_servo2_angle(angle)
time.sleep(0.01)
finally:
px.forward(0)
How it works?
The basic functions of PiCar-X are in the picarx.py program file,
under the path /home/pi/picar-x/lib. The picarx.py program is used for controlling the servo and wheels,
and will make the PiCar-X move forward, turn in an S-shape, or shake its head.
Now, the libraries to support the basic functionality of PiCar-X are imported. These lines will appear in all the examples that involve PiCar-X movement.
import sys
sys.path.append(r'/home/pi/picar-x/lib')
from utils import reset_mcu
reset_mcu()
from picarx import Picarx
import time
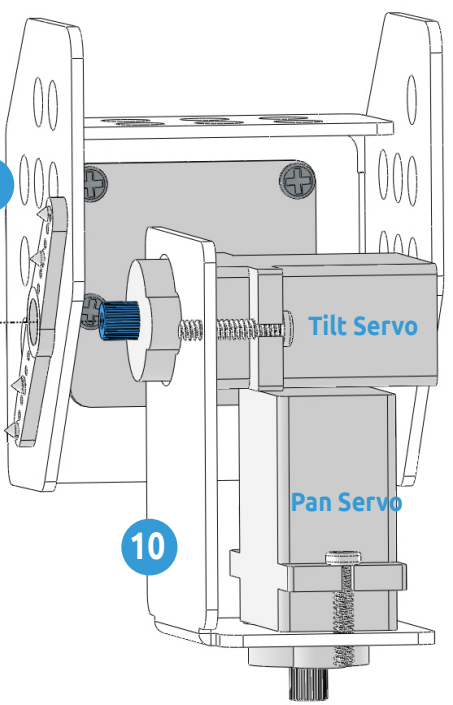
The following function with the for loop is then used to make PiCar-X move forward, change directions, and move the camera’s pan/tilt.
px.forward(speed)
px.set_dir_servo_angle(angle)
px.set_camera_servo1_angle(angle)
px.set_camera_servo2_angle(angle)
forward(): Orders the PiCar-X go forward at a givenspeed.set_dir_servo_angle: Turns the Steering servo to a specificangle.set_camera_servo1_angle: Turns the Pan servo to a specificangle.set_camera_servo2_angle: Turns the Tilt servo to a specificangle.