舵机校准(重要)
备注
如果你的 Robot HAT 版本为 V44 或更高(扬声器位于电路板顶部),并且带有板载 Zero 按钮,则可以跳过此步骤,直接按下 Zero 按钮即可启动舵机归零程序。

舵机的角度范围为 -90°~90°,但出厂时舵机的初始角度是随机的,可能是 0°,也可能是 45°。 如果在这种情况下直接进行安装,当机器人运行程序后会出现动作混乱的情况,严重时甚至可能导致舵机卡死并烧毁。
因此,在安装之前,我们需要先将所有舵机的角度统一设置为 0°,这样无论舵机向哪个方向转动,其初始位置都在中间。
为了确认舵机已经正确设置为 0°,请先将舵机臂插到舵机轴上,然后轻轻转动舵机臂到其他角度。这样做只是为了让你能够清楚地看到舵机是否在转动。

接下来,运行
example/文件夹中的servo_zeroing.py。cd ~/picar-x/example sudo python3 servo_zeroing.py
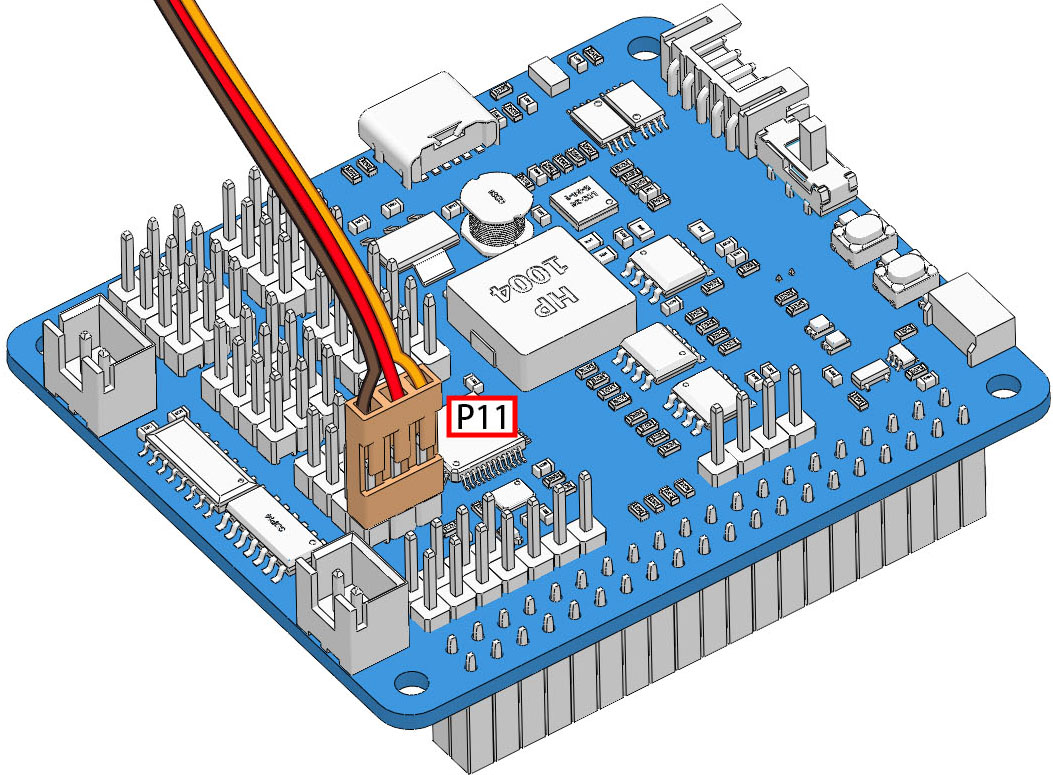
然后,按照下图所示,将舵机线插入 P11 接口。此时你会看到舵机臂转动到某个位置(这就是 0° 位置,该位置是随机的,可能不是完全垂直或平行)。
现在,取下舵机臂,保持舵机线仍然连接,并且 不要关闭电源。随后按照纸质说明继续完成组装。
备注
在使用螺丝固定舵机之前,请不要拔掉舵机线;固定完成后可以再拔掉。
舵机通电时请勿手动旋转舵机,以免造成损坏;如果舵机轴插入角度不正确,请将舵机取下并重新插入。
在安装每一个舵机之前,都需要先将舵机线插入 P11 接口并接通电源,将舵机角度设置为 0°。