注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[here]をクリックして今すぐ参加しましょう!
2. PiCar-Xを動かす
これは最初のプロジェクトです。PiCar-Xの基本的な動きをテストしましょう。
コードの実行
cd ~/picar-x/example
sudo python3 2.move.py
このコードを実行すると、PiCar-Xは前進し、S字型に曲がり、停止して頭を振ります。
コード
注釈
以下のコードは 変更/リセット/コピー/実行/停止 が可能です。しかし、それをする前に、 picar-x/example のようなソースコードのパスに移動する必要があります。コードを変更した後、直接実行して効果を確認できます。
from picarx import Picarx
import time
if __name__ == "__main__":
try:
px = Picarx()
px.forward(30)
time.sleep(0.5)
for angle in range(0,35):
px.set_dir_servo_angle(angle)
time.sleep(0.01)
for angle in range(35,-35,-1):
px.set_dir_servo_angle(angle)
time.sleep(0.01)
for angle in range(-35,0):
px.set_dir_servo_angle(angle)
time.sleep(0.01)
px.forward(0)
time.sleep(1)
for angle in range(0,35):
px.set_camera_servo1_angle(angle)
time.sleep(0.01)
for angle in range(35,-35,-1):
px.set_camera_servo1_angle(angle)
time.sleep(0.01)
for angle in range(-35,0):
px.set_camera_servo1_angle(angle)
time.sleep(0.01)
for angle in range(0,35):
px.set_camera_servo2_angle(angle)
time.sleep(0.01)
for angle in range(35,-35,-1):
px.set_camera_servo2_angle(angle)
time.sleep(0.01)
for angle in range(-35,0):
px.set_camera_servo2_angle(angle)
time.sleep(0.01)
finally:
px.forward(0)
それはどのように機能するのですか?
PiCar-Xの基本機能は、 picarx モジュールにあります。
これは、ステアリングギアやホイールの制御に使用され、
PiCar-Xを前進させたり、S字型に曲がらせたり、頭を振らせたりすることができます。
現在、PiCar-Xの基本機能をサポートするライブラリがインポートされています。 これらの行は、PiCar-Xの動きを伴うすべての例に表示されます。
from picarx import Picarx
import time
次に、 for ループを使用する以下の関数は、PiCar-Xを前進させ、
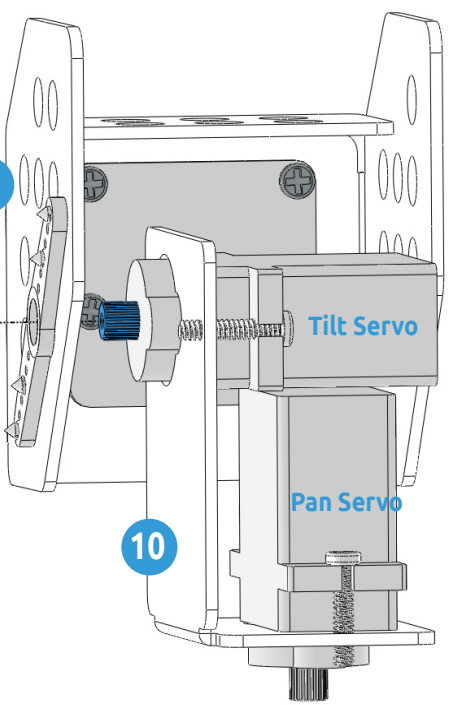
方向を変え、カメラのパン/チルトを動かすために使用されます。
px.forward(speed)
px.set_dir_servo_angle(angle)
px.set_camera_servo1_angle(angle)
px.set_camera_servo2_angle(angle)
forward():PiCar-Xに指定されたspeedで前進するよう命令します。set_dir_servo_angle:ステアリングサーボを特定のangleに回転させます。set_cam_pan_angle:パンサーボを特定のangleに回転させます。set_cam_tilt_angle:チルトサーボを特定のangleに回転させます。