Light Following¶
How It Works¶
The light follower module detects light sources in the surroundings, and transfers the data to the processor. The processor analyzes the data and finds the direction of the light resource, so it will send a command to control the movement of the front and rear wheels to approach the resource.
Procedures¶
Step 1 Assembly
Connect the light follower to the Sensor Connector with M3*10 screws and M3 nuts, and then assemble them to the car with two M3*10 screws and two M3 nuts. You’re suggested to hold the nuts underneath with your fingers.

Step 2 Wiring
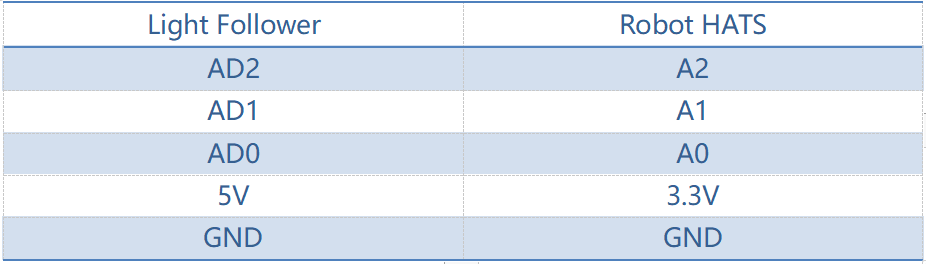
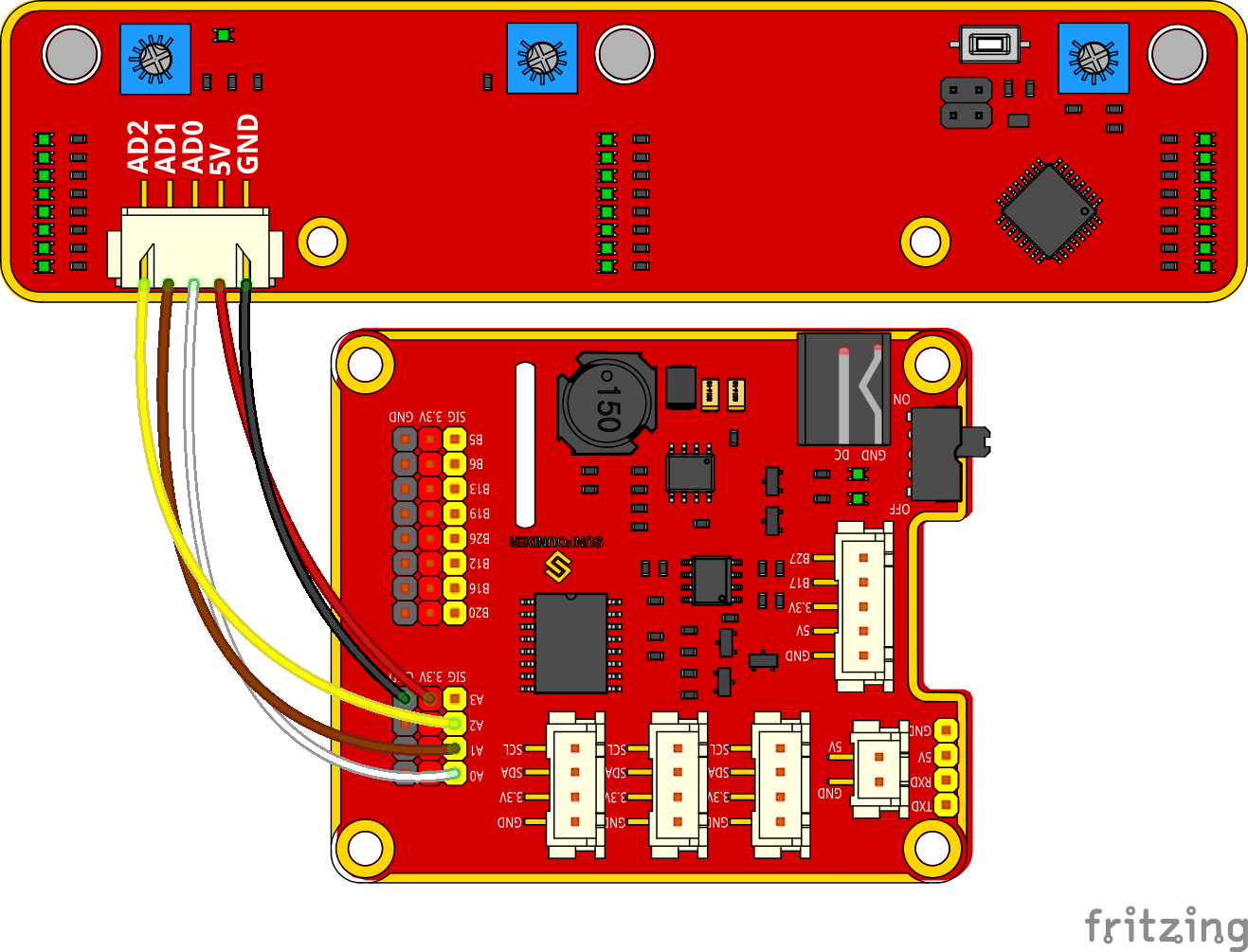
Connect the light follower to the Robot HATS with a 5-pin anti-reverse cable as shown below.
Note
You may wonder why we connect 5V to 3.3. Well, since the working voltage of the STM8 chip on the light follower is 2.7-5.5V, we can connect it to 3.3V here. DO NOT connect 5V to 5V! All the analog ports on the Robot HATS are led from the PCA8591, which is powerd by 3.3V. Therefore, if the voltage is between 3.3V-5V, the output value will always be 255, thus the PCA8591 may be damaged if connected to 5V. Remember to connect to 3.3V.
The wiring is shown as below:
Step 3 Test
Let’s test the light follower first.
cd ~/SunFounder_PiCar-S/example/
python3 test_light_module.py
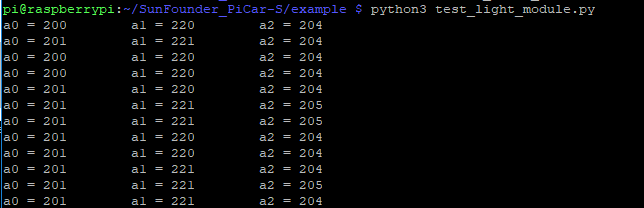
Expose the phototransistors to the light spot of the flashlight. When you increase the light intensity, more LEDs light up, and the output values decrease.
Here we can rotate the blue adjustable resistor to change the values under the same light luminance. The best status is as follows:
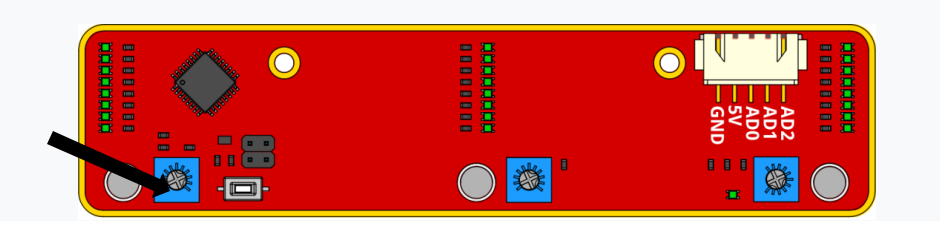
When there is only one LED lights up, the output value is 255
When the light is the brightest and all the LED light up, the output value is about 10-25.
Step 4. Get on the road!
git submodule update --init
python3 light_follower.py
The car will enter the light following configuration mode when we run the code above. It will keep turning to the right in a circle to gather the information of light condition in different directions. So just place the car in an open field and wait.
When the calibration is done, the car will stop temporarily. Shine a flashlight on the light follower module, and the car will just follow the light spot as you moves it.
Code Explanation for light_follower.py¶
Whole Work Flow
Light-sensitive sensors need to be calibrated before actual use because of complex light conditions in the environment. It gathers the information of the ambient light luminance. The car can follow light only when the light source is brighter than the surroundings.
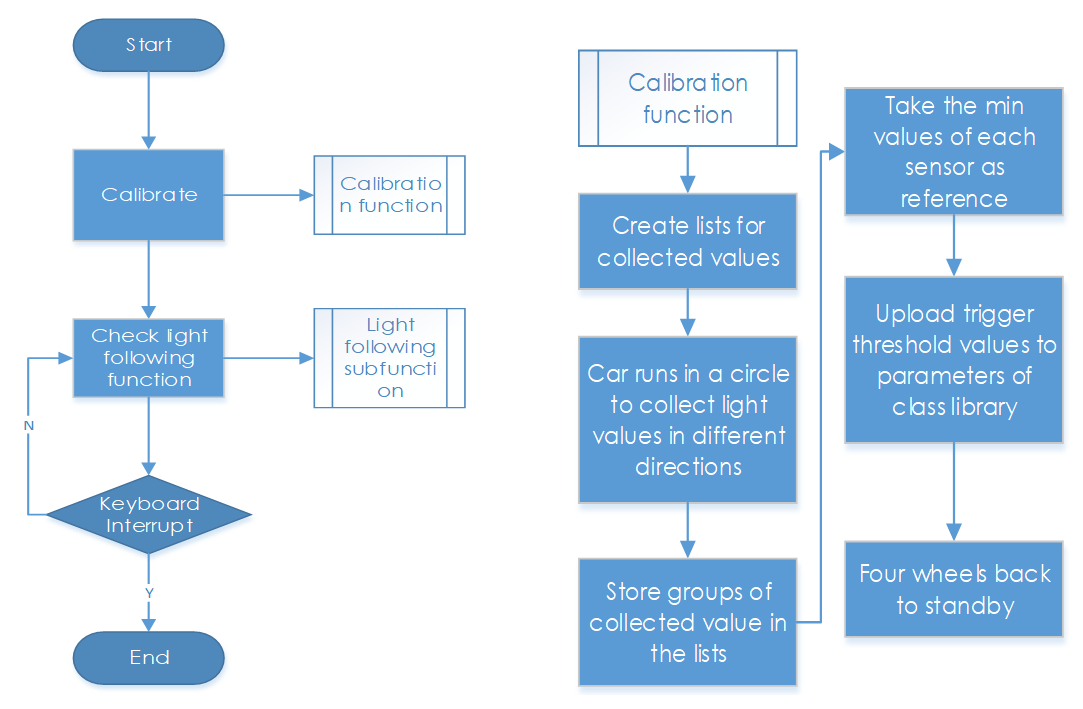
Here write two main functions/modules including light following calibration and light following in the main program.
Subflow of Light Follower Calibration Function
We need to configure three light-sensitive components separately, so we set three lists to store the values in A0, A1, and A2 collected for multiple times. Then pick out the minimum values, which are the output analog values in the brightest conditions.
Since the light source we use is much brighter than the ambient light, we should take the output values in the brightest conditions as reference.
Besides, we should set a threshold value - when the gap between the collected value of the light source and that of the environment is beyond the threshold, trigger the value switching to 0 or 1. Here we use [0,0,0] to represent the three photoresistors’ status when they are not triggered. “0” will become “1” when the value detected of the corresponding photoresistor is higher than the threshold. Thus we can set the related action of the car according to the three-element list.
If there is light detected, the car will move and follow it; if there is no light detected, the car will stop temporarily and keep turning to detect in a circle.
Subflow of Light Following Function
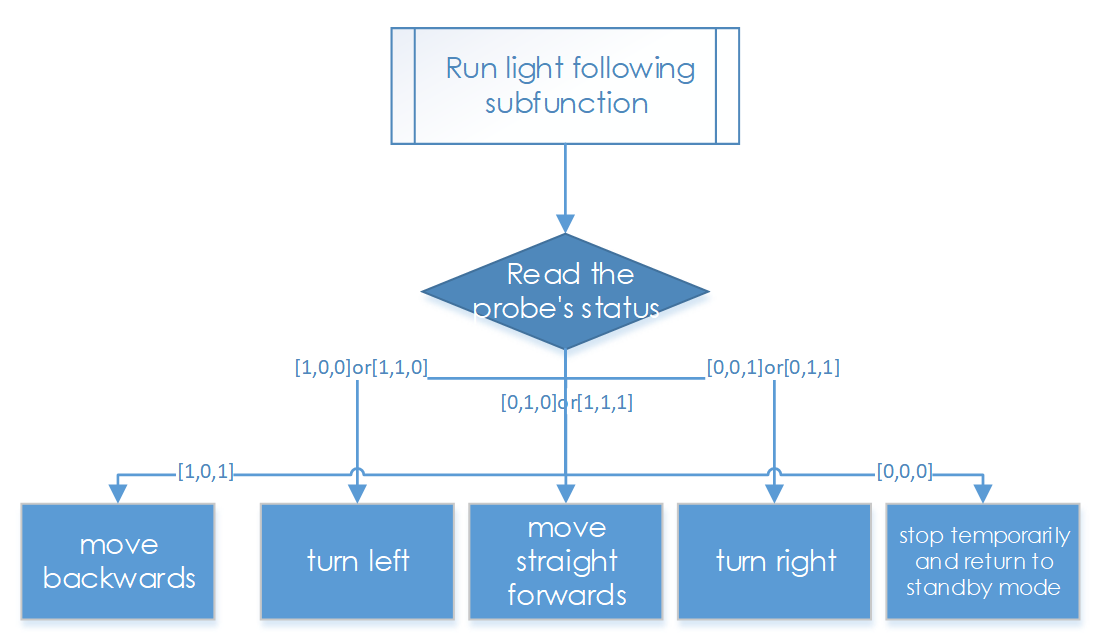
The light follower includes three phototransistors, thus its status list is composed of three elements which represent 8 statuses (based on permutation and combination). And here we need to set related responses to these statuses.
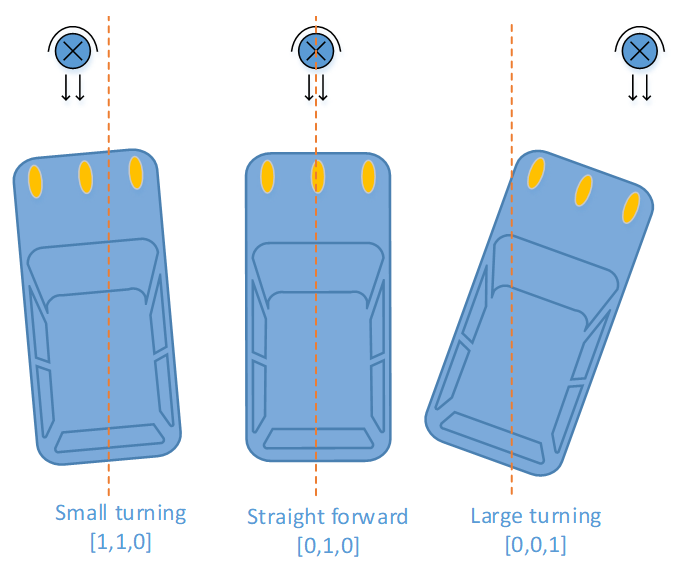
The three elements show the status of the three probes: 1 represents light detected, and 0, for none. For example, [1,0,0] shows that light is detected only by the left probe, meaning th light source is at the left of the car, thus setting the car’s response action as turning left; [1,1,0] means that light is detected on the left and central probes, thus its response action should be set turning left too; and set it as turning right the same way according to the corresponding status. When there is no light detected, the status is [0,0,0], so we set the response action to stop and return to the standby mode.
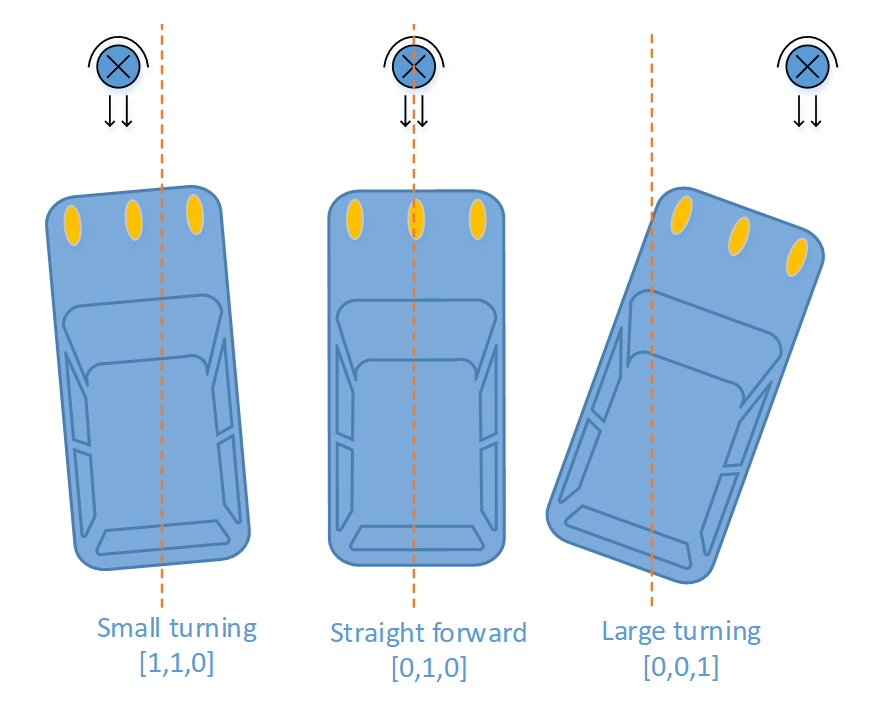
Here, we need to set another variable – the steering angle – to distinguish between the large-angle and small-angle turning. If the light is at the central left side (status [1,1,0]), we should apply a small-angle turning; if the light is at the edge of the left side (status [1,0,0]), we should apply a large-angle turning.
Functions Explanation¶
To understand the code, take the software subflows above for reference.
Three Python modules are used in the code including the imported light_follower_module, front_wheels, and back_wheel previously. They are drivers for this kit, respectively for light following, front wheels and rear wheels.
The related classes have been defined here. When the modules are applied to use, objects will be created for related classes, and different parts of hardware will be driven by calling a function by the class object.
For example, for the light following module, we create an object named lf:
lf = Light_Follower.Light_Follower()
Then we can call the function by a class object.
A0 = lf.read_analog()[0]
This function read_analog() will return a list with three elements, which stores the detected analog values of three probes. Here we use A0 = lf.read_analog()[0], A1 = lf.read_analog()[1], and A2 = lf.read_analog()[2] to store three elements of returned value separately into the variables A0-A2.
A for() loop is used here cycling 10 times, that is the car will acquire the analog values ten times when the car drives in a circle under the calibration mode. The minimum values will be taken as reference here. If you need more samples, just increase the times of the loop.
Store the detected values to a list in each loop by the env0_list.append(A0) function. When the loop ends, the built-in list function reference[0] = min(env0_list) in Python will pick out the minimum in the list.
lt_status_now = lf.read_flashlight()
This is to read the status of the module, which will return a 3-element list. This function is used to solve the possible problem caused by brightness-adjustable flashlights. They blink repeatedly due to brightness change by PWM method, so we add this function to the driver library to prevent the car from moving and stopping repeatedly when the light source lights up and goes out quickly or changes luminance by ON/OFF ratio.
fw.turn(turning_angle)
Function for front wheels steering. The main program will call this function if the front wheels are applied for steering. The parameter is the turning angle.
bw.forward()
bw.set_speed(forward_speed)
Here we need two functions for rear wheels. The first function is to control the rotating direction as forward (the function for backwards is bw.backward()). The second one is to set the rotating speed of the wheels; the parameter is the speed value (range: 0-100). The bigger the parameter is, the faster the wheel rotates.