Calibration¶
Calibrate the Servo¶
Remember the commands to adjust the servo to 90 degrees previously? Now, let’s talk about the other two commands.
The second command front-wheel-test is used to test whether the front wheels can turn flexibly after assembly. When you run this command, it will drive them to turn left and right.
picar front-wheel-test
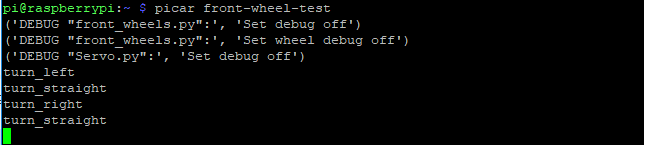
You may find the direction of the front wheels is not facing exactly front when they are in the straight status. If there is an obvious deviation from the middle line of the front chassis, reassemble the servo and run servo-install again; if it is just a little deviation (like about 0~15 degrees), it can be adjusted by software.
Get into the folder SunFounder_PiCar/picar:
cd /home/pi/SunFounder_PiCar/picar
sudo nano config
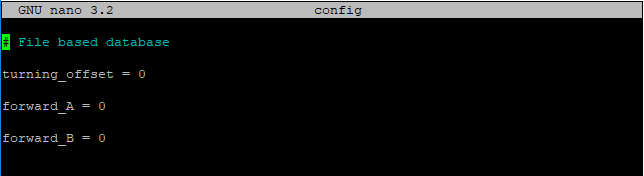
Open the config file under the folder with an editor. You can see a few parameters. The value of turning_offset is used to adjust the front wheels. Its value is 0 by default. If you want to make the front wheels turn right a bit, just modify it to a larger number; to make it more towards the left, you can set it smaller (it can even be a negative number).
But DO NOT over-configure the wheels (recommended a value between -30 and 30), or the servo may be stuck and broken.
After changing the value of turning_offset, press Ctrl + O to save the changes, and press Ctrl + X to exit. Run the command picar servo-install to check the front wheel’s status.
picar servo-install
If the front wheels is still not facing the exact front, you may need to edit the file config for a couple of times. The front wheels may need to be adjusted about 3 to 5 times usually. We can move on to calibration of the rear wheels when the front wheels are done.
Calibrate the Motors¶
Since the wiring of the two DC motors is random, the VCC and GND of a motor may be connected to the wheel reversely, causing the wheel to spin forward when it should do backward as configured in the code. Thus we can use the third command which will drive the rear wheels to simultaneously speed up and slow down alternately.
picar rear-wheel-test
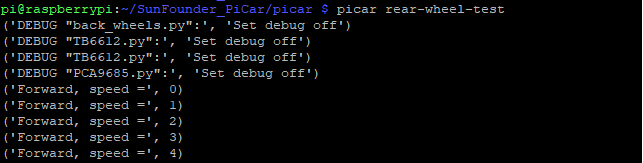
Check whether both the two rear wheels rotate direction is the same as the screen. Note that the two wheels are driven by the two motors separately. It may happen that one rotates forward, while the other does backwards. If so, we need to adjust one or both two wheels which rotate reversely under that command.
cd /home/pi/SunFounder_PiCar/picar
sudo nano config
forward_A and forward_B are to change the default spinning direction of the two motors. The value can only be 0 or 1, which represents clockwise and counterclockwise rotation. By default, it’s 0 for both parameters. Thus if a wheel spins reversely, you only need to change the corresponding parameter for the wheel to 1.
Press Ctrl + O to save the changes, and press Ctrl + X to exit.
Run the command picar rear-wheel-test again to check whether the rear wheels are rotating in accordance with the command.
picar rear-wheel-test
Copy config to the directory example under PiCar-S.
cp config ~/SunFounder_PiCar-S/example