Combination¶
So, this smart car now is smart in three separate features. But, you think only one sensor module is not enough? Try to combine those sensor modules in one! Here we can show you an experiment - light following with obstacle avoidance for reference.
When the car runs with the light follower, sometimes it may crash into obstacles when following the light, and it’s not quite convenient to let the car move back (though we’ve set the car to move backward if the array is [1,0,1], it’s hard to acquire these values since the the car is moving and the light cannot be exactly as required sometimes). So we consider Also, you can let the car move backwards by a paper board or your foot, which is quite easy.
Check below the program of this example.
Assemble the light follower module and ultrasonic obstacle avoidance module on the car first.
Log into the Raspberry Pi on your computer via ssh, and get into the directory
cd ~/SunFounder_PiCar-S/example
Run the code.
python3 light_with_obsavoidance.py
How it works¶
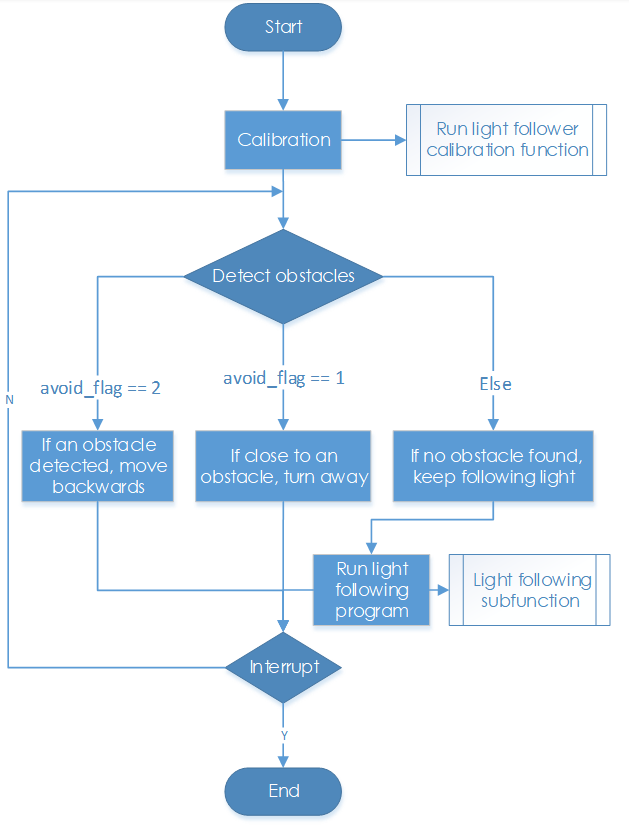
Set the obstacle avoidance as a superior priority than light following: if there is an obstacle in front of the car, it walk away from the obstacle and back to the track; if not, then the car will keep follow light.
Since the light following and obstacle avoidance of the car depend on the sensor modules, we set two functions to read the status of two sensors separately, and assign values to flags to be returned from the functions: state_light(), and state_sonic().
In the function state_sonic(), the return value is avoid_flag.
If the car is close to an obstacle, it will return avoid_flag =2;
if it is too close to the obstacle, it will return avoid_flag =1;
if ahead no obstacle is detected near, it will return avoid_flag =0.
In the function state_light(), the return value is light_flag.
If the light spot is in front of the car, it will return light_flag = 0;
if the spot is at the right side, it will return light_flag = 1;
if the spot is at the left side, it will return light_flag = 2;
if the spot is at the back, it will return light_flag = 3;
if no light spot is detected, it will return light_flag = 4.
The main program main() will run the corresponding program according to avoid_flag and light_flag, and the avoid_flag is superior in priority.