键盘控制¶
除了双摇杆模块,我们还可以用键盘上的按键来控制 PiArm 移动。
铲斗 - 键盘控制¶
运行代码
cd /home/pi/piarm/examples
sudo python3 keyboard_control1.py
运行代码之后,按照提示,按下键盘上的按键来控制PiArm的手臂和铲斗。
但你需要先将 铲斗 安装到PiArm上。
注解
w,s,a,d,i和k用来控制手臂的转动。j和l用来控制铲斗的角度。
代码
from piarm import PiArm
from robot_hat import Pin,PWM,Servo,ADC
from time import time,sleep
from robot_hat.utils import reset_mcu
import sys
import tty
import termios
reset_mcu()
sleep(0.01)
arm = PiArm([1,2,3])
arm.bucket_init(PWM('P3'))
arm.set_offset([0,0,0])
controllable = 0
manual = '''
Press keys on keyboard
w: extend
s: retract
a: turn left
d: turn right
i: go up
k: go down
j: open
l: close
ESC: Quit
'''
def readchar():
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
try:
tty.setraw(sys.stdin.fileno())
ch = sys.stdin.read(1)
finally:
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
return ch
def control(key):
arm.speed = 100
flag = False
alpha,beta,gamma = arm.servo_positions
bucket = arm.component_staus
if key == 'w':
alpha += 3
flag = True
elif key == 's':
alpha -= 3
flag = True
if key == 'a':
gamma += 3
flag = True
elif key == 'd':
gamma -= 3
flag = True
if key == 'i':
beta += 3
flag = True
elif key == 'k':
beta -= 3
flag = True
if key == 'j':
bucket -= 1
flag = True
elif key == 'l':
bucket += 1
flag = True
if flag == True:
arm.set_angle([alpha,beta,gamma])
arm.set_bucket(bucket)
print('servo angles: %s , bucket angle: %s '%(arm.servo_positions,arm.component_staus))
if __name__ == "__main__":
print(manual)
while True:
key = readchar().lower()
control(key)
if key == chr(27):
break
它是如何工作的?
def readchar():
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
try:
tty.setraw(sys.stdin.fileno())
ch = sys.stdin.read(1)
finally:
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
return ch
该功能引用标准输入流并返回读取的数据流的第一个字符。
tty.setraw(sys.stdin.fileno)就是将标准输入流改为raw模式,即传输过程中所有字符都不会被转义,包括特殊字符。old_settings = termios.tcgetattr(fd)和termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)并起到备份和恢复的作用。
def control(key):
arm.speed = 100
flag = False
alpha,beta,gamma = arm.servo_positions
bucket = arm.component_staus
if key == 'w':
alpha += 3
flag = True
elif key == 's':
alpha -= 3
flag = True
if key == 'a':
gamma += 3
flag = True
elif key == 'd':
gamma -= 3
flag = True
if key == 'i':
beta += 3
flag = True
elif key == 'k':
beta -= 3
flag = True
if key == 'j':
bucket -= 1
flag = True
elif key == 'l':
bucket += 1
flag = True
if flag == True:
arm.set_angle([alpha,beta,gamma])
arm.set_bucket(bucket)
print('servo angles: %s , bucket angle: %s '%(arm.servo_positions,arm.component_staus))
在这个代码中,创建了 control() 函数来通过读取键盘上的键值来控制PiArm。
alpha,beta和gamma分别指的是手臂上的3个舵机的角度,参考: 角度模式。按下键盘上的
w键,alpha增加,让手臂向前伸。按下键盘上的
s键,alpha减小,让手臂向里缩。按下键盘上的
a键,gamma增加,让手臂向左转动。按下键盘上的
d键,gamma减小,让手臂向右转动。按下键盘上的
i键,beta增加,让手臂向上。按下键盘上的
k键,beta减小,让手臂向下。最后,分别用
k和l按键来控制铲斗的角度。
while True:
key = readchar().lower()
control(key)
if key == chr(27):
break
在主程序中调用 readchar() 来读取按键值,然后将读取的键值传入到 control() 函数中,这样PiArm就会根据不同的按键来移动。
key == chr(27) 代表按键 Esc 按键。
竖直夹 - 键盘控制¶
运行代码
cd /home/pi/piarm/examples
sudo python3 keyboard_control2.py
运行代码之后,按照提示,按下键盘上的按键来控制PiArm的手臂和竖直夹。
但你需要先将 竖直夹 安装到PiArm上。
注解
w,s,a,d,i和k用来控制手臂的转动。j和l用来控制竖直夹的角度。
代码
from piarm import PiArm
from robot_hat import Pin,PWM,Servo,ADC
from time import time,sleep
from robot_hat.utils import reset_mcu
import sys
import tty
import termios
reset_mcu()
sleep(0.01)
arm = PiArm([1,2,3])
arm.hanging_clip_init(PWM('P3'))
arm.set_offset([0,0,0])
controllable = 0
manual = '''
Press keys on keyboard
w: extend
s: retract
a: turn left
d: turn right
i: go up
k: go down
j: open
l: close
ESC: Quit
'''
def readchar():
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
try:
tty.setraw(sys.stdin.fileno())
ch = sys.stdin.read(1)
finally:
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
return ch
def control(key):
arm.speed = 100
flag = False
alpha,beta,gamma = arm.servo_positions
clip = arm.component_staus
if key == 'w':
alpha += 3
flag = True
elif key == 's':
alpha -= 3
flag = True
if key == 'a':
gamma += 3
flag = True
elif key == 'd':
gamma -= 3
flag = True
if key == 'i':
beta += 3
flag = True
elif key == 'k':
beta -= 3
flag = True
if key == 'j':
clip -= 1
flag = True
elif key == 'l':
clip += 1
flag = True
if flag == True:
arm.set_angle([alpha,beta,gamma])
arm.set_hanging_clip(clip)
print('servo angles: %s , clip angle: %s '%(arm.servo_positions,arm.component_staus))
if __name__ == "__main__":
print(manual)
while True:
key = readchar().lower()
control(key)
if key == chr(27):
break
在这个代码中,创建了 control() 函数来通过读取键盘上的键值来控制PiArm。
alpha,beta和gamma分别指的是手臂上的3个舵机的角度,参考: 角度模式。按下键盘上的
w键,alpha增加,让手臂向前伸。按下键盘上的
s键,alpha减小,让手臂向里缩。按下键盘上的
a键,gamma增加,让手臂向左转动。按下键盘上的
d键,gamma减小,让手臂向右转动。按下键盘上的
i键,beta增加,让手臂向上。按下键盘上的
k键,beta减小,让手臂向下。最后,分别用
k和l按键来控制竖直夹的角度。
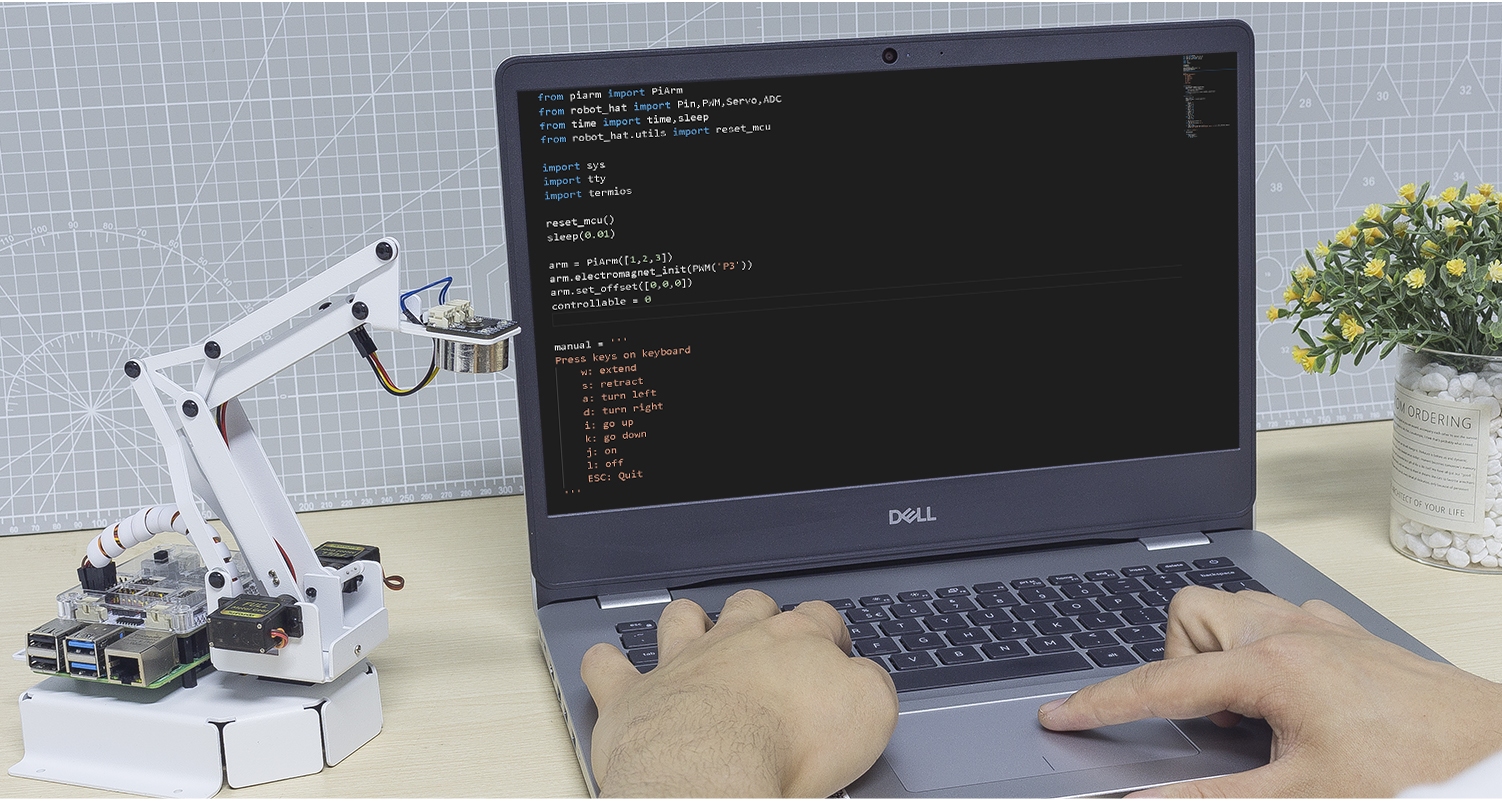
电磁铁 - 键盘控制¶
运行代码
cd /home/pi/piarm/examples
sudo python3 keyboard_control1.py
运行代码之后,按照提示,按下键盘上的按键来控制PiArm的手臂和电磁铁。
但你需要先将 电磁铁 安装到PiArm上。
注解
w,s,a,d,i和k用来控制手臂的转动。j和l用来控制电磁铁的开关。
代码
from piarm import PiArm
from robot_hat import Pin,PWM,Servo,ADC
from time import time,sleep
from robot_hat.utils import reset_mcu
import sys
import tty
import termios
reset_mcu()
sleep(0.01)
arm = PiArm([1,2,3])
arm.electromagnet_init(PWM('P3'))
arm.set_offset([0,0,0])
controllable = 0
manual = '''
Press keys on keyboard
w: extend
s: retract
a: turn left
d: turn right
i: go up
k: go down
j: on
l: off
ESC: Quit
'''
def readchar():
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
try:
tty.setraw(sys.stdin.fileno())
ch = sys.stdin.read(1)
finally:
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
return ch
def control(key):
arm.speed = 100
flag = False
alpha,beta,gamma = arm.servo_positions
status = ""
if key == 'w':
alpha += 3
flag = True
elif key == 's':
alpha -= 3
flag = True
if key == 'a':
gamma += 3
flag = True
elif key == 'd':
gamma -= 3
flag = True
if key == 'i':
beta += 3
flag = True
elif key == 'k':
beta -= 3
flag = True
if key == 'j':
arm.set_electromagnet('on')
elif key == 'l':
arm.set_electromagnet('off')
if flag == True:
arm.set_angle([alpha,beta,gamma])
print('servo angles: %s , electromagnet status: %s '%(arm.servo_positions,status))
if __name__ == "__main__":
print(manual)
while True:
key = readchar().lower()
control(key)
if key == chr(27):
break
在这个代码中,创建了 control() 函数来通过读取键盘上的键值来控制PiArm。
alpha,beta和gamma分别指的是手臂上的3个舵机的角度,参考: 角度模式。按下键盘上的
w键,alpha增加,让手臂向前伸。按下键盘上的
s键,alpha减小,让手臂向里缩。按下键盘上的
a键,gamma增加,让手臂向左转动。按下键盘上的
d键,gamma减小,让手臂向右转动。按下键盘上的
i键,beta增加,让手臂向上。按下键盘上的
k键,beta减小,让手臂向下。最后,分别用
k和l按键来控制电磁铁的开关。