坐标模式¶
PiArm 的手臂有 2 种控制模式: 角度 和 坐标。
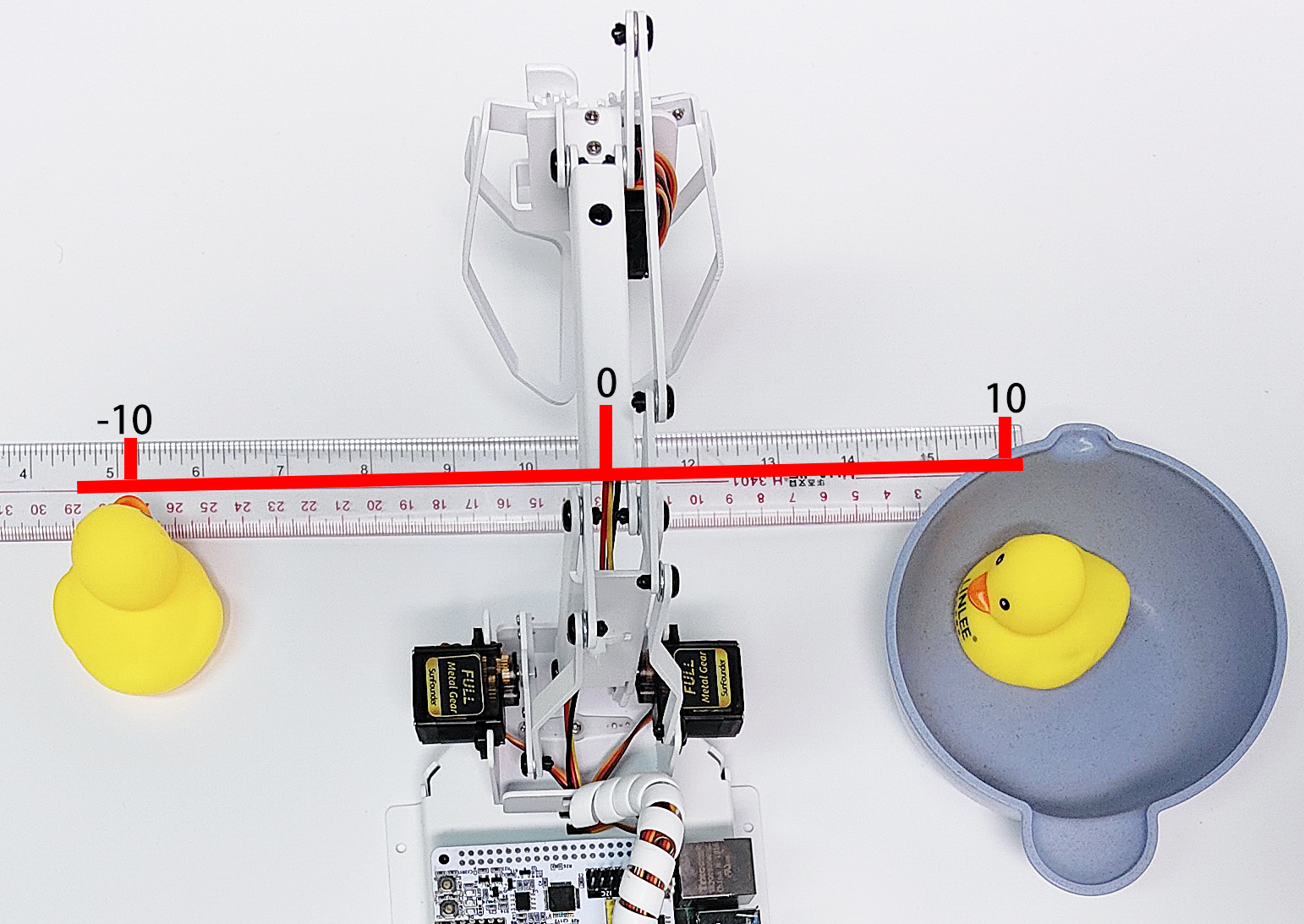
本项目通过坐标模式,设定2个坐标点,让机械臂将左边的橡皮鸭夹到右边的碗里。但你需要先将 竖直夹 装到PiArm上。
运行代码
cd /home/pi/piarm/examples
sudo python3 coordinate_mode.py
代码运行后,你就能看到PiArm将左边的橡皮鸭夹到右边的碗里。
但你需要先将 竖直夹 安装到PiArm上。
代码
from re import M
from robot_hat import PWM
from robot_hat.utils import reset_mcu
from time import sleep
from piarm import PiArm
reset_mcu()
sleep(0.01)
" Grab an object from one coordinate to another coordinate"
arm = PiArm([1,2,3])
arm.set_offset([0,0,0])
arm.hanging_clip_init(PWM('P3'))
if __name__ == "__main__":
start_coord = [-100, 40, 20] # x,y,z
end_coord = [100, 40, 30] # x,y,z
arm.set_speed(60)
arm.set_hanging_clip(20)
arm.do_by_coord(start_coord)
arm.set_hanging_clip(90)
start_coord_up = [start_coord[0], start_coord[1], 80]
arm.do_by_coord(start_coord_up)
end_coord_up = [end_coord[0], end_coord[1], 80]
arm.do_by_coord(end_coord_up)
arm.do_by_coord(end_coord)
arm.set_hanging_clip(20)
arm.do_by_coord(end_coord_up)
它是如何工作的?
start_coord = [-100, 40, 20] # x,y,z
end_coord = [100, 40, 30] # x,y,z
start_coord:左边橡皮鸭的坐标。end_coord: 右边碗的坐标。
注解
这里的坐标都是指的控制点的坐标,但是装好臂端工具后,X和Y坐标的实际距离大一点。
不同的臂端工具,误差距离不一样。比如竖直夹和电磁铁为3-4cm, 铲斗为6-7cm。
比如在这里X坐标写的是100,但实际距离是13-14cm。
一般建议X的坐标是-80 ~ 80,但由于这里Y坐标值较小(建议范围是30~130),所以设置为100也是能到的。但如果你增大了Y坐标值,由于连杆作用,X坐标值需要根据实际情况调小一点。
arm.set_speed(60)
arm.set_hanging_clip(20)
arm.do_by_coord(start_coord)
arm.set_hanging_clip(90)
start_coord_up = [start_coord[0], start_coord[1], 80]
arm.do_by_coord(start_coord_up)
end_coord_up = [end_coord[0], end_coord[1], 80]
arm.do_by_coord(end_coord_up)
arm.do_by_coord(end_coord)
arm.set_hanging_clip(20)
arm.do_by_coord(end_coord_up)
PiArm先张开竖直夹(20°),然后转动到左边橡皮鸭的位置(
start_coord),再合拢竖直夹(90°)。PiArm抬起头(
start_coord_up),再转动到右边的碗的正上方(end_coord_up)。PiArm低头(
end_coord), 再张开竖直夹(20°)让橡皮鸭掉落到碗里,最后再抬起头(end_coord_up)。