21. 使用 OpenClaw 控制 PiCrawler
什么是 OpenClaw?
您可以将其视为 ChatGPT 的升级版。传统聊天机器人只能说话(生成文本),而 OpenClaw 可以采取行动。它能理解您的自然语言指令,并在计算机上实际执行 操作,如运行命令、管理文件和调用各种工具。
以下是一些精彩的应用场景:
个人全能助手: 让它帮您管理日程、设置提醒和跟踪任务。您只需在聊天应用 (如 Telegram、WhatsApp)中告诉它,它就能记住并执行。
自动化”粘合剂”: 它可以充当各种服务的粘合剂。例如,让它监控网站价格 变化,一旦检测到降价,自动触发 n8n 自动化工作流向您发送邮件通知。
专属开发助手: 让它管理服务器、运行脚本、检查日志。您只需说”帮我检查 系统负载”,它就能 SSH 到服务器执行命令并返回结果。
硬件”玩伴”: 这是一个非常有趣的用例。您可以让 OpenClaw 控制连接在 树莓派上的硬件。例如,有开发者用它控制带机械臂的扫地机器人,甚至分析赛车 模拟器数据并显示在 LED 屏幕上。树莓派官方团队甚至仅通过对话就为一场婚礼 搭建了自动拍照亭,一行代码都没写!
重要
树莓派 Zero 2W 只有 512MB 内存,而 OpenClaw 最低需要 1GB。因此无法正常 运行。建议使用树莓派 4/5 或更高版本。
OpenClaw 快速入门
如果想尽快体验 OpenClaw 的强大功能,请使用此方法。它将自动安装 OpenClaw 并启动交互式设置向导。
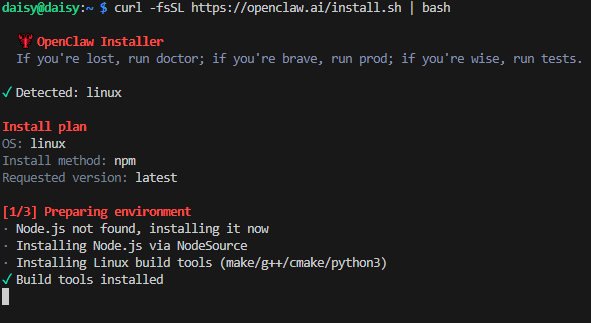
在树莓派上打开终端,直接运行以下命令。该命令从官网下载安装脚本并执行:
curl -fsSL https://openclaw.ai/install.sh | bash
备注
由于新版本更新很快,您的安装步骤可能略有不同,这是正常的。
脚本将自动下载并安装 OpenClaw。
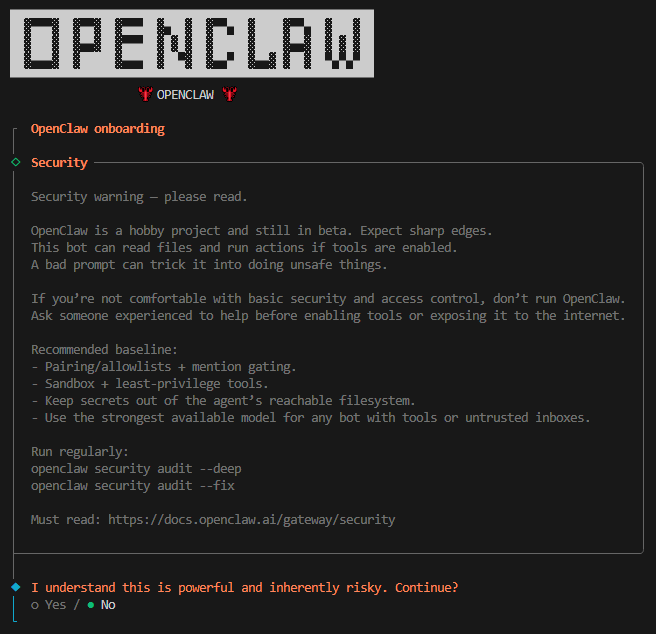
您将看到安全提示,询问是否信任 OpenClaw。确认安全可靠后,使用箭头键 导航到”Yes”并按 Enter。
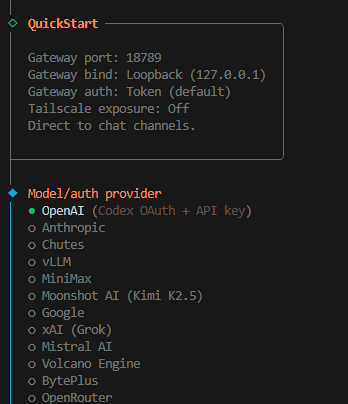
选择 Quick Start,然后按 Enter。

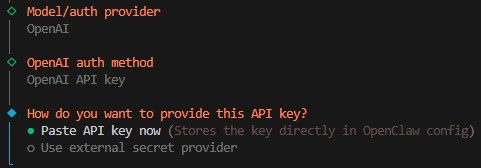
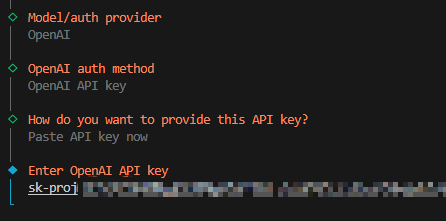
选择您的模型,然后按 Enter。这里以 OpenAI 为例。
选择 OpenAI API Key。
现在粘贴 API 密钥。
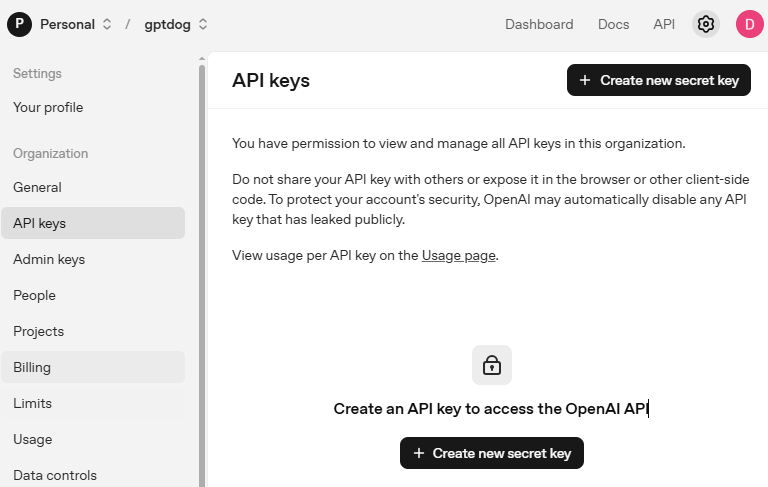
前往 OpenAI 平台 并登录。在 API keys 页面,点击 Create new secret key。
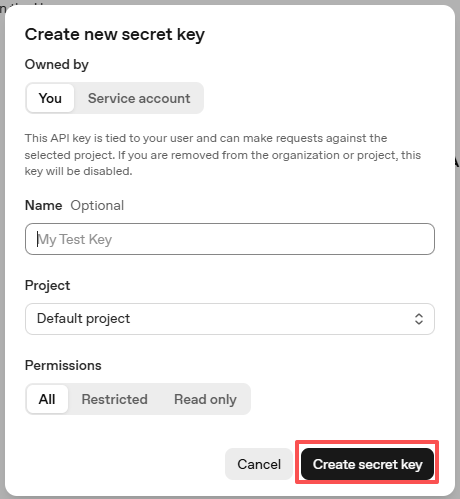
填写详细信息,然后点击 Create secret key。
密钥创建后立即复制 — 您将无法再次查看。如果丢失,需要生成新的。
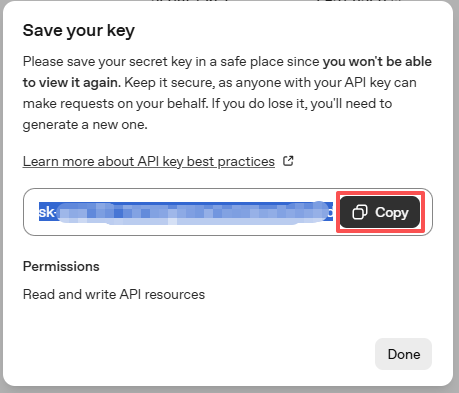
将密钥粘贴到 OpenClaw 配置中。
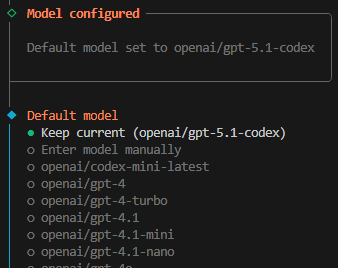
选择要使用的模型。本例使用 Keep current。
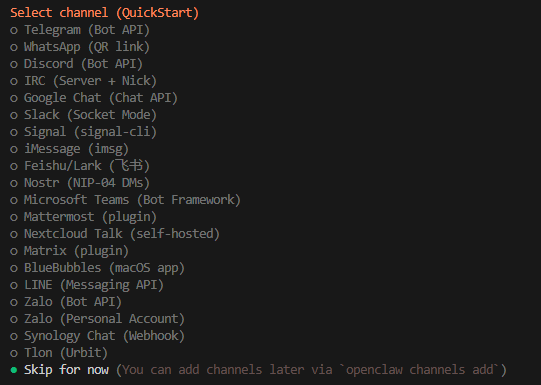
接下来是频道选择。频道指 OpenClaw 支持的通信服务,如 Telegram、 WhatsApp、Discord 等。使用下箭头选择”Skip for now”,按 Enter。
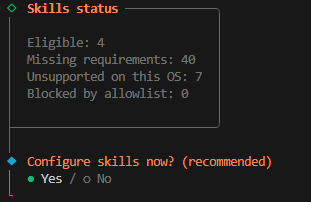
接下来提示立即配置技能。选择”Yes”并按 Enter。
安装所需技能。下例中选择”Skip for now”(按空格键选择),按 Enter。
接下来是 Hooks;选择”command-logger”和”session-memory”。
安装完成。选择”Hatch in TUI”并按 Enter 启动 OpenClaw。
备注
输入以下命令启动 OpenClaw:
openclaw tui
按两次 Ctrl+C 可退出 TUI 界面。
让 OpenClaw 操控 PiCrawler
什么是 PiCrawler Skill?
PiCrawler Skill 是 OpenClaw 的扩展,让您通过自然语言控制 SunFounder PiCrawler 机器人蜘蛛。无需编写 Python 脚本或记住坐标值,只需告诉 OpenClaw 您想要 PiCrawler 做什么 — 如”站起来”、”向前走三步”或”检查 前方是否有障碍物” — OpenClaw 将自动执行相应的 Python 代码。
您可以做以下事情:
基本动作: 前进、后退、左/右转、小角度转弯
姿态: 站立、坐下
表情动作: 挥动前腿、跳舞、俯卧撑、环顾四周
传感器: 读取超声波距离传感器检测障碍物
声音: 通过机器人扬声器播放音效和音乐
摄像头视觉: 拍照、人脸检测、颜色跟踪、二维码和手势识别
前提条件
在使用 PiCrawler Skill 之前,请确保:
PiCrawler 已正确组装并连接到树莓派
OpenClaw 已安装并运行
已安装以下 Python 库:
picrawler、robot_hat、vilib
验证安装:
python3 -c "import picrawler"
如果命令无错误运行,即可继续。
安装 PiCrawler Skill
复制 PiCrawler 技能文件 到 OpenClaw 技能目录:
cp -r ~/picrawler/picrawler-control ~/.openclaw/workspace/skills/
验证安装:
ls ~/.openclaw/workspace/skills/picrawler-control/应看到
SKILL.md、install.sh、scripts/和references/。
从命令行测试 PiCrawler Skill
检查超声波距离:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py sensor distance
让 PiCrawler 坐下/站立:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py pose sit --speed 40
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py pose stand --speed 40
前进/转弯:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py move forward --steps 2 --speed 60
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py move "turn left" --steps 1 --speed 60
播放音效:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py sound play /home/pi/picrawler/examples/sounds/talk1.wav --volume 80
舵机校准:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py calibrate
在 OpenClaw 中使用 PiCrawler Skill
启动 OpenClaw TUI:
openclaw tui发送自然语言命令,例如:”站起来”、”向前走三步”、”跳个舞”、”拍照”、”检测人脸”等
OpenClaw 自动将请求翻译为 Python 代码并在 PiCrawler 上执行
可用动作和命令
移动 (pc.py move):forward、backward、turn left、
turn right、turn left angle、turn right angle
姿态 (pc.py pose):stand、sit
额外动作:dance、push_up、wave、look_left、
look_right、look_up、look_down
传感器:sensor distance — 读取超声波距离(返回厘米)
声音 (pc.py sound):sound play <文件>、sound music <文件>、
sound volume <0-100>、sound stop
摄像头视觉:拍照、人脸检测、颜色检测、手势识别、交通标志检测、QR 码扫描
故障排除
OpenClaw 问题
openclaw: command not found→ 运行echo 'export PATH="$HOME/.npm-global/bin:$PATH"' >> ~/.bashrc && source ~/.bashrcnot connected to gateway→ 另开终端运行openclaw gateway,然后重启 TUI无法操控系统 → 编辑
~/.openclaw/openclaw.json,将tools.profile设为"coding",tools.exec.security设为"full",然后openclaw gateway restart
PiCrawler 问题
不响应命令 → 检查连接和电源,然后测试
pc.py pose sit --speed 40import picrawler失败 → 运行bash ~/.openclaw/workspace/skills/picrawler-control/install.shOpenClaw 不识别技能 → 在 TUI 中说 “Please rsync my skills” 或重启 gateway
动作不稳定 → 降低速度参数(如
--speed 40)或在连续命令间添加短暂延迟