Nota
Hola, bienvenido a la comunidad de entusiastas de SunFounder Raspberry Pi & Arduino & ESP32 en Facebook. ¡Explora más a fondo Raspberry Pi, Arduino y ESP32 con otros entusiastas!
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Obtén acceso anticipado a anuncios de nuevos productos y vistas previas.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones festivas y sorteos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [aquí] y únete hoy mismo.
Ajuste del Servo (Importante)
Nota
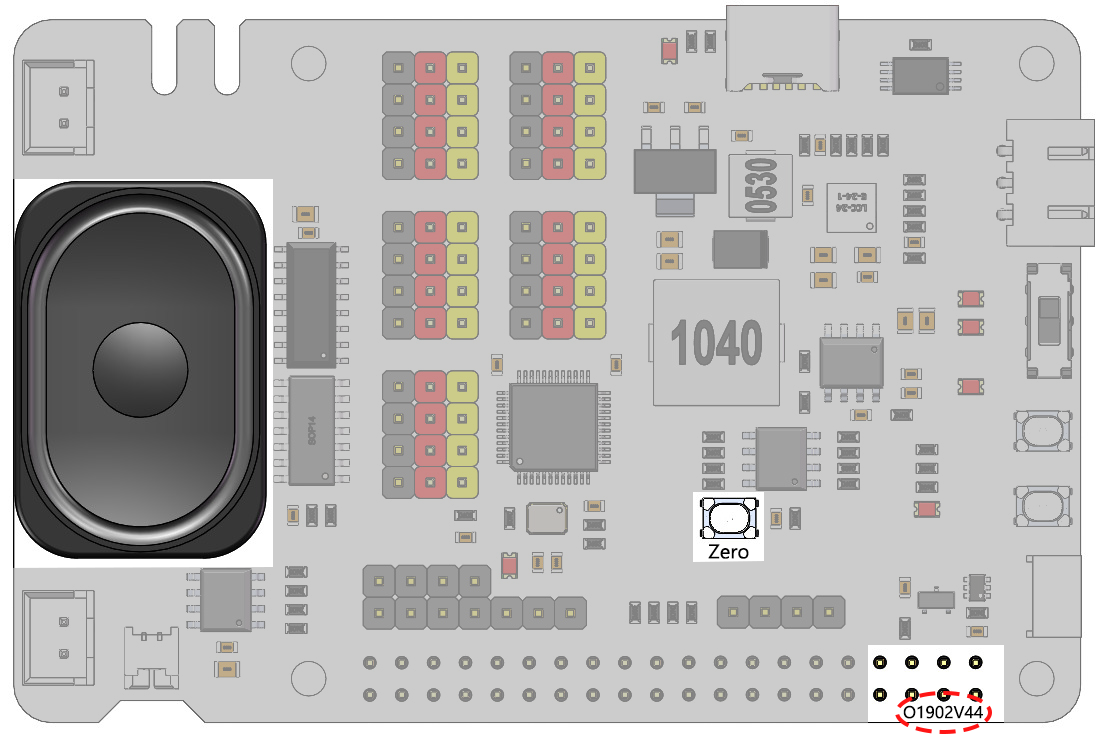
Si tu Robot HAT es versión V44 o superior (con el altavoz ubicado en la parte superior de la placa) e incluye un botón Zero integrado, puedes omitir este paso y simplemente presionar el botón Zero para activar el programa de calibración de servos.
El rango de ángulo del servo es de -90° a 90°, pero el ángulo configurado en fábrica es aleatorio, puede ser 0°, 45°, etc. Si ensamblamos el robot con este ángulo directamente, podría causar un estado caótico al ejecutar el código o, peor aún, bloquear y dañar el servo.
Por lo tanto, necesitamos configurar todos los servos en 0° antes de instalarlos, asegurándonos de que estén centrados, sin importar hacia qué dirección giren.
Para garantizar que el servo esté correctamente configurado en 0°, primero inserta el brazo del servo en el eje del servo y luego gira suavemente el brazo hacia un ángulo diferente. Este brazo del servo se utiliza solo para verificar visualmente la rotación del servo.

Ahora, ejecuta
servo_zeroing.pyen la carpetaexamples/.cd ~/picrawler/examples sudo python3 servo_zeroing.py
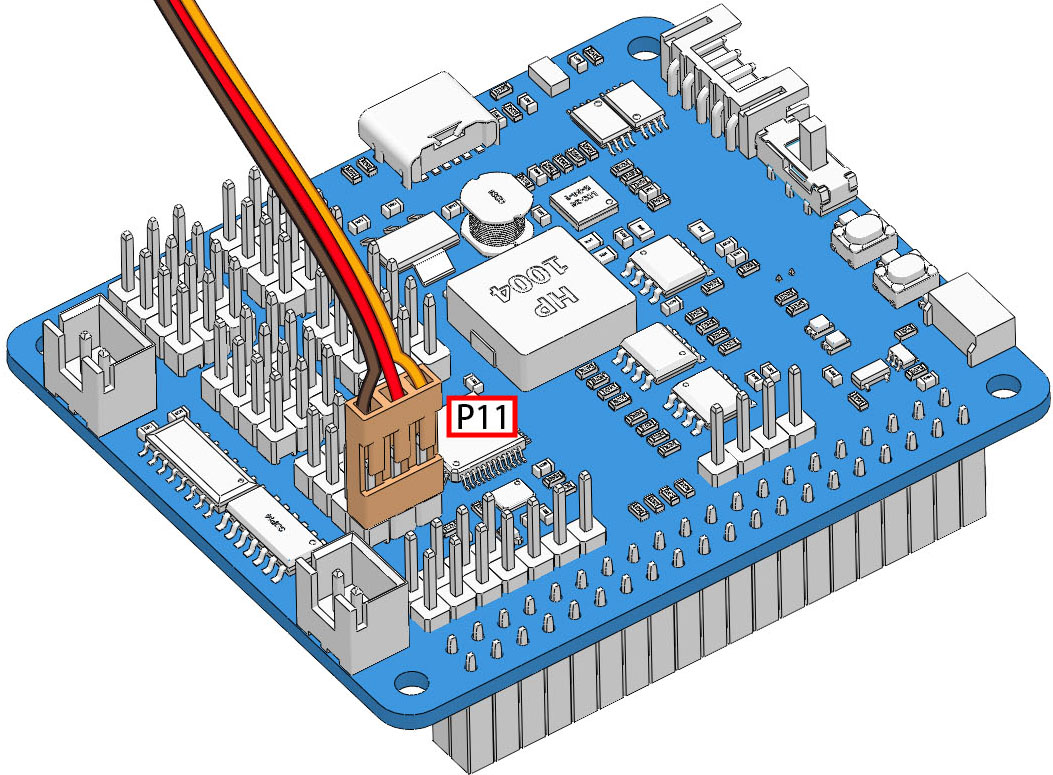
A continuación, conecta el cable del servo al puerto P11 como se muestra. Al mismo tiempo, observarás que el brazo del servo gira hacia una posición (esta es la posición de 0°, que puede no ser completamente vertical o paralela).
Retira ahora el brazo del servo, asegurándote de que el cable del servo permanezca conectado, y no apagues la energía. Continúa con el ensamblaje siguiendo las instrucciones del manual.
Nota
No desconectes el cable del servo antes de fijarlo con el tornillo del servo; puedes desconectarlo después de fijarlo.
No gires el servo mientras está encendido para evitar daños; si el eje del servo no está insertado en el ángulo correcto, retira el servo e insértalo nuevamente.
Antes de ensamblar cada servo, debes conectar el cable del servo al pin PWM y encender la energía para configurar su ángulo en 0°.