Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
3.5 Small Fan
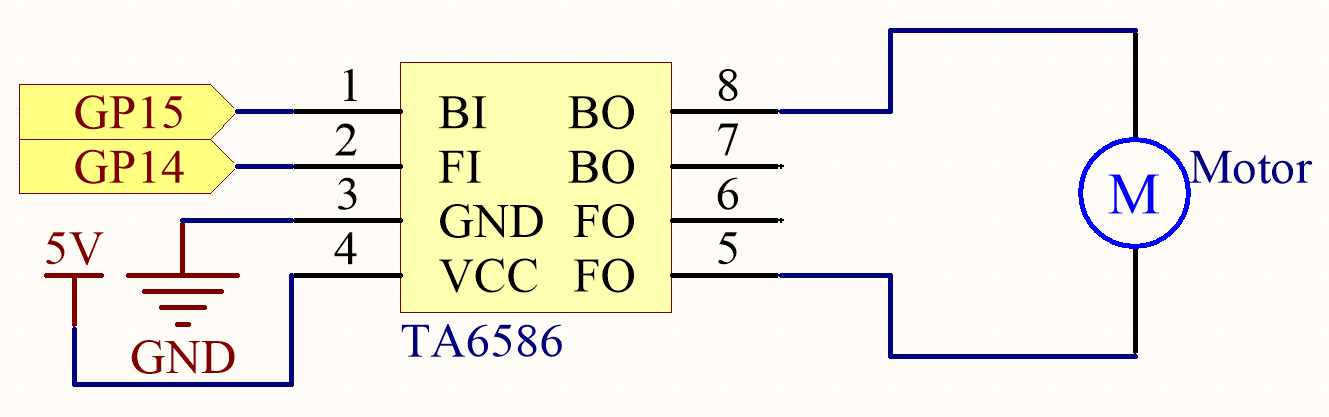
Now we use the TA6586 to drive the DC motor to make it rotate clockwise and counterclockwise. Since the DC motor requires a relatively large current, for safety reasons, here we use a power module to supply power to the motor.
Required Components
In this project, we need the following components.
It’s definitely convenient to buy a whole kit, here’s the link:
Name |
ITEMS IN THIS KIT |
LINK |
|---|---|---|
Kepler Kit |
450+ |
You can also buy them separately from the links below.
SN |
COMPONENT |
QUANTITY |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USB Cable |
1 |
|
3 |
1 |
||
4 |
Several |
||
5 |
1 |
||
6 |
1 |
||
7 |
1 |
||
8 |
Power Pack |
1 |
|
9 |
Battery Holder |
1 |
Schematic
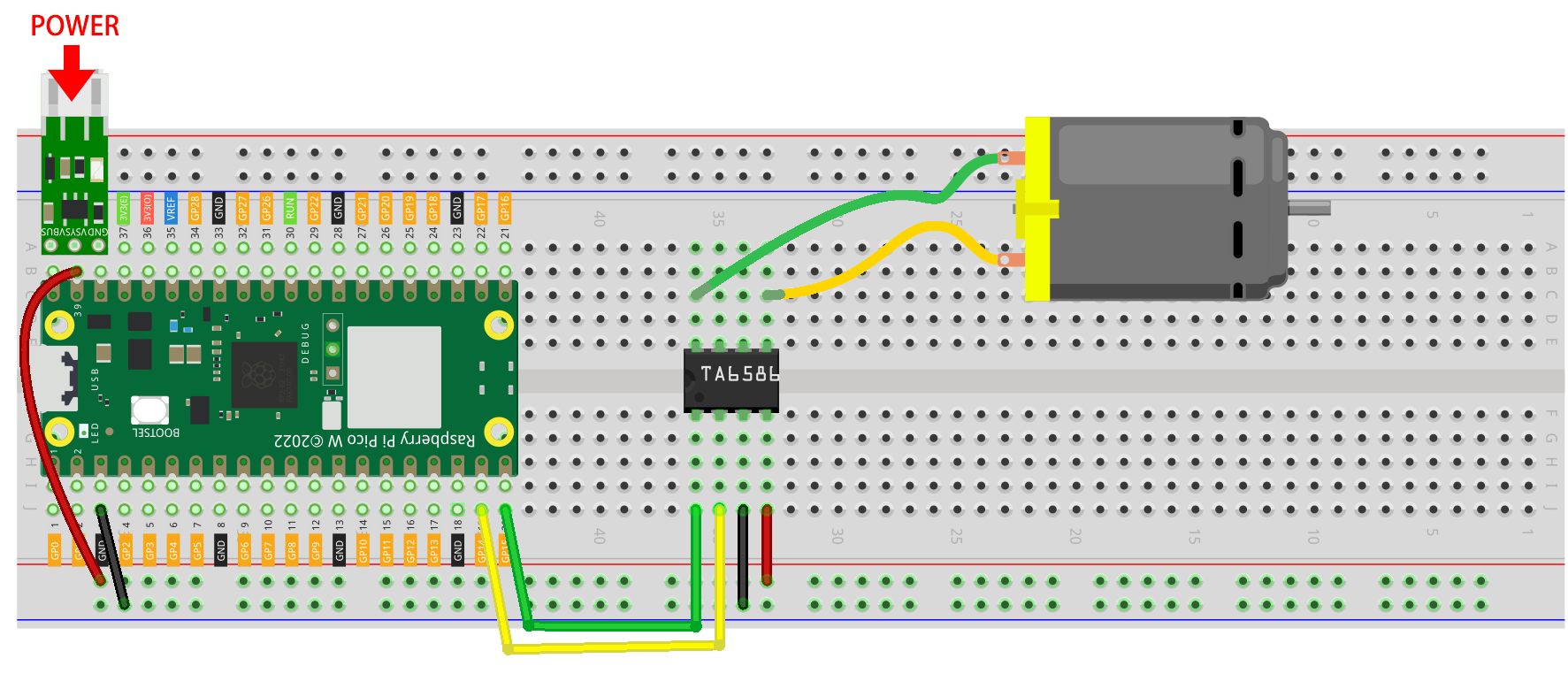
Wiring
Note
Since DC motors require a high current, we use a Li-po Charger module to power the motor here for safety reasons.
Make sure your Li-po Charger Module is connected as shown in the diagram. Otherwise, a short circuit will likely damage your battery and circuitry.
Code
Note
Open the
3.5_small_fan.pyfile under the path ofkepler-kit-main/micropythonor copy this code into Thonny, then click “Run Current Script” or simply press F5 to run it.Don’t forget to click on the “MicroPython (Raspberry Pi Pico)” interpreter in the bottom right corner.
For detailed tutorials, please refer to Open and Run Code Directly.
import machine
import utime
motor1A = machine.Pin(14, machine.Pin.OUT)
motor2A = machine.Pin(15, machine.Pin.OUT)
def clockwise():
motor1A.high()
motor2A.low()
def anticlockwise():
motor1A.low()
motor2A.high()
def stopMotor():
motor1A.low()
motor2A.low()
while True:
clockwise()
utime.sleep(1)
stopMotor()
utime.sleep(1)
anticlockwise()
utime.sleep(1)
stopMotor()
utime.sleep(1)
Once the program is running, the motor will rotate back and forth in a regular pattern.
Note
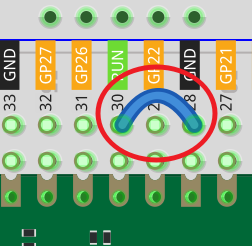
If the motor is still spinning after you click the Stop button, you need to reset the RUN pin on the Pico W with a wire to GND at this time, and then unplug this wire to run the code again.
This is because the motor is operating with too much current, which may cause the Pico W to disconnect from the computer.