通过 APP 快速开始
准备好开始您的火星冒险了吗? 通过 RoboPilot App 的快速开始功能,组装好 GalaxyRVR 后即可开始探索。
使用 RoboPilot,您可以:
以第一人称视角驾驶火星车
在三种控制模式间切换: Remote 、 Avoid 和 Follow
备注
如果您已覆盖固件并需要恢复通信,请按照 3. 更新 R3 板固件 进行操作。
安装 Mammoth Coding App
扫描下方二维码下载。

iOS 用户
直接选择在 App Store 或者是 Google Play 中安装就可以了。

安卓用户
扫码后,点击右上角的菜单按钮,选择 “用浏览器打开”。进入浏览器后,点击 “APK下载”。

在弹出的下载页面中,点击 “下载” 即可。

下载完成后,浏览器会询问是否安装。点击 “允许”,部分手机需要经过安全扫描才能继续安装,耐心等待就好。

安装完成后,RoboPilot 图标就会出现在你的手机桌面上了。
快速指南
启动 GalaxyRVR。
首次使用 GalaxyRVR 前,请使用附带的 Type-C USB 线将电池充满电。
打开电源开关。
将模式切换到 Run 并按下 R3 板上的 Reset 按钮。
底部灯带将闪烁 绿色 ,表示启动成功。
如果底部灯带显示 非绿色的闪烁灯光 ,则您的 GalaxyRVR 需要固件更新。请参阅 更新固件。
将您的移动设备连接到 GalaxyRVR 的 WiFi 网络。
网络名称(SSID)为
GalaxyRVR,密码为12345678。如果看到提示”无互联网访问”,请选择 “保持连接” 选项。

打开 RoboPilot。点击 ‘Go into’ 进入控制界面。
Remote 模式
进入控制界面后,您将看到以下画面。 背景显示的是 GalaxyRVR 摄像头拍摄的视图,并叠加了遥控控件。
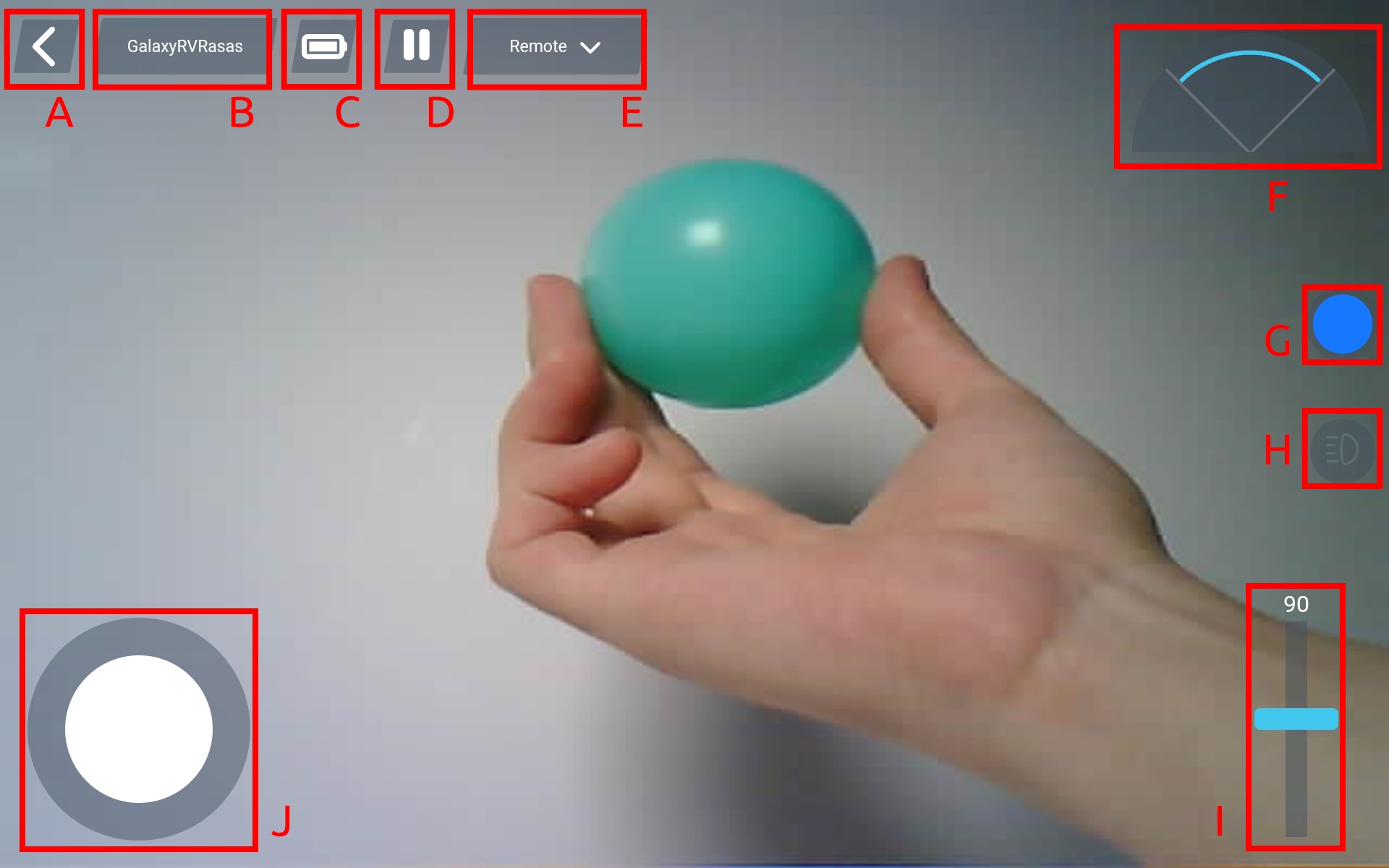
以下是各控件的说明:
Back(返回)
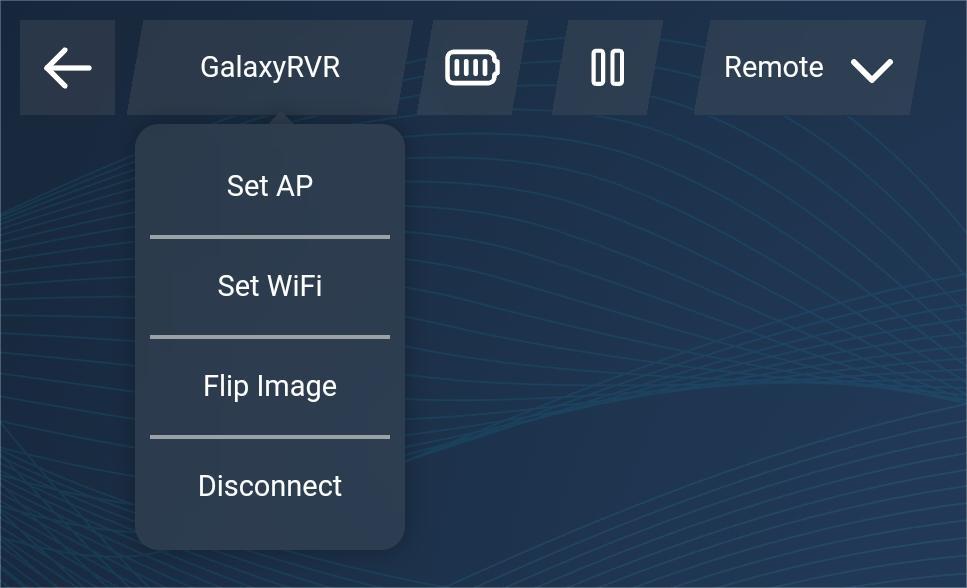
Settings(设置):在此处可以更改 AP(热点)的名称和密码、设置 WiFi、翻转图像以及断开连接。
Battery level indicator(电池电量指示器)
Pause/Run the APP(暂停/运行 APP)
Mode Selection(模式选择):在此处可以选择 Remote 模式、Avoid 模式和 Follow 模式。默认设置为 Remote 模式 。

Obstacle monitor(障碍物监测):此模块分为三个区域,左右两侧显示避障模块的检测结果,中央区域显示超声波传感器的探测结果。
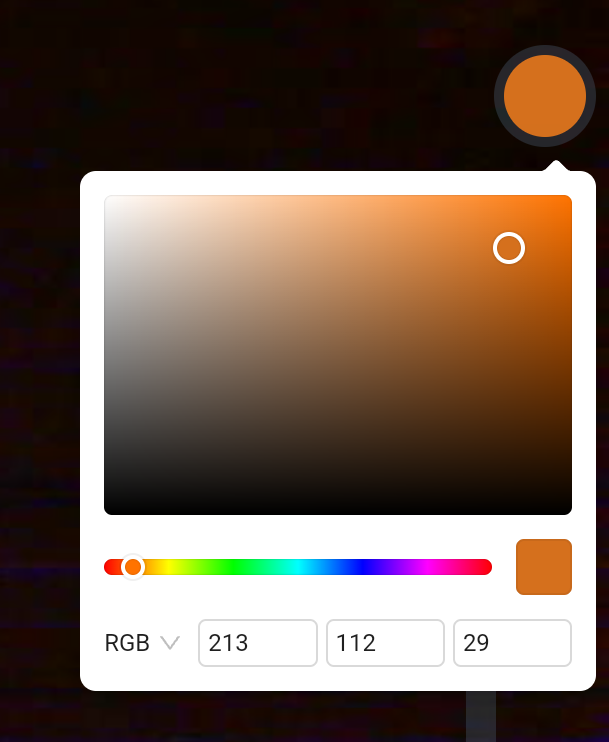
Color selector(颜色选择器):在此处选择底盘的灯光颜色。
Camera LED switch(摄像头 LED 开关)
Adjust the gimbal angle(调节云台角度),范围 0-130°。0° 时朝向天空。
Move the joystick(移动摇杆)以控制 GalaxyRVR 的运动。轻推可使 GalaxyRVR 缓慢移动。
Avoid 模式与 Follow 模式
Avoid 模式 :GalaxyRVR 将向前移动并避开路径上的障碍物。
Follow 模式 :GalaxyRVR 将朝向面前的物体移动,或左右转向以跟随物体的运动。
当您选择 Avoid 模式 或 Follow 模式 时,您将看到以下界面。GalaxyRVR 的实时摄像头画面构成背景,控制选项叠加在画面上方。
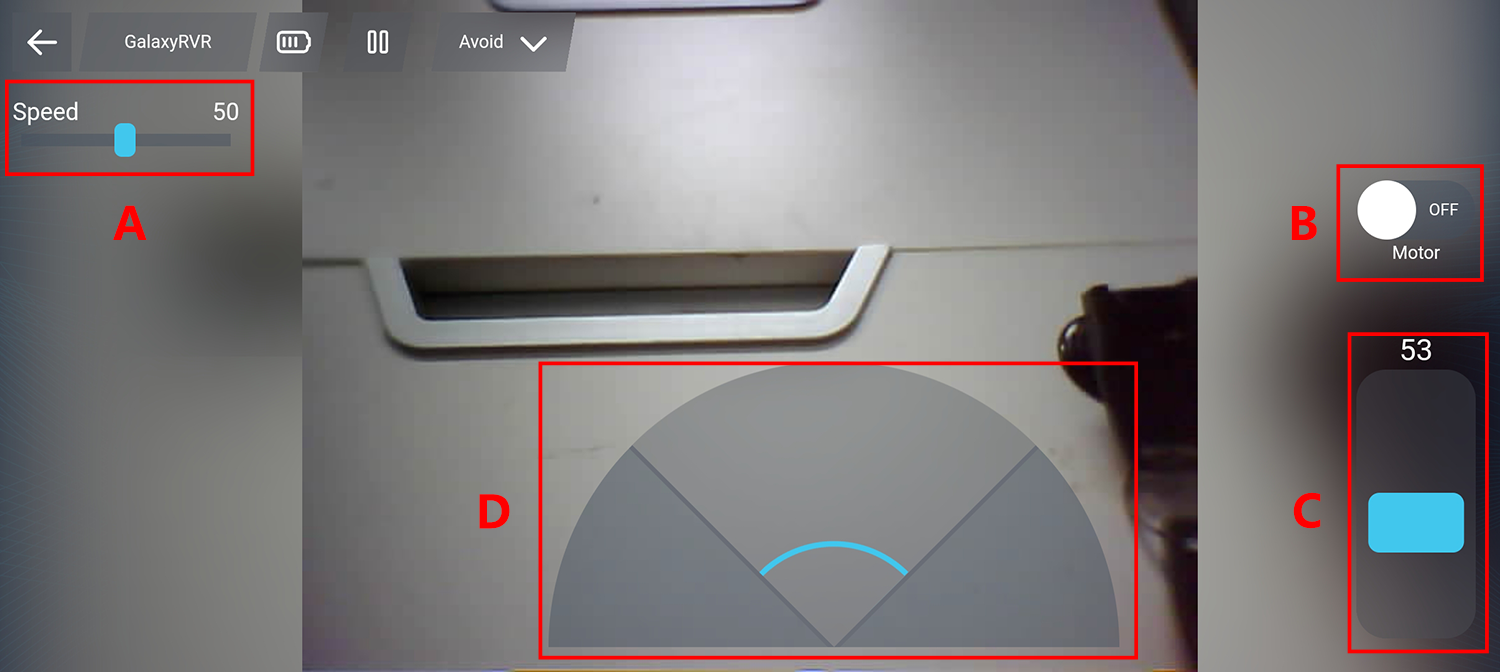
界面控件说明:
Speed Control(速度控制) - 调整 GalaxyRVR 的运动速度
Motor Control(电机控制) - 启动或停止 GalaxyRVR 的运动
Gimbal Control(云台控制) - 调节摄像头角度,范围 0°(朝向天空)到 130°
Obstacle Monitor(障碍物监测) - 传感器的视觉反馈:
左/右区域:红外障碍物检测
中央区域:超声波距离测量
调整障碍物检测范围
在使用此模式前,请校准传感器检测范围以适应您的环境。出厂设置可能并非最佳。
范围过短:火星车可能撞上障碍物
范围过长:火星车可能不必要地转向
校准步骤:
从右侧模块开始
确保发射器/接收器正确对齐
如果在运输过程中弯曲,请将其掰直
测试并调整灵敏度
将障碍物放置在 20cm 处(使用火星车包装盒)
旋转电位器直到指示灯亮起
验证在所需距离处能否稳定触发
如有需要,使用第二个电位器
对左侧模块重复相同操作
重新连接
如果网络失败或断开连接,您将跳转到此页面。
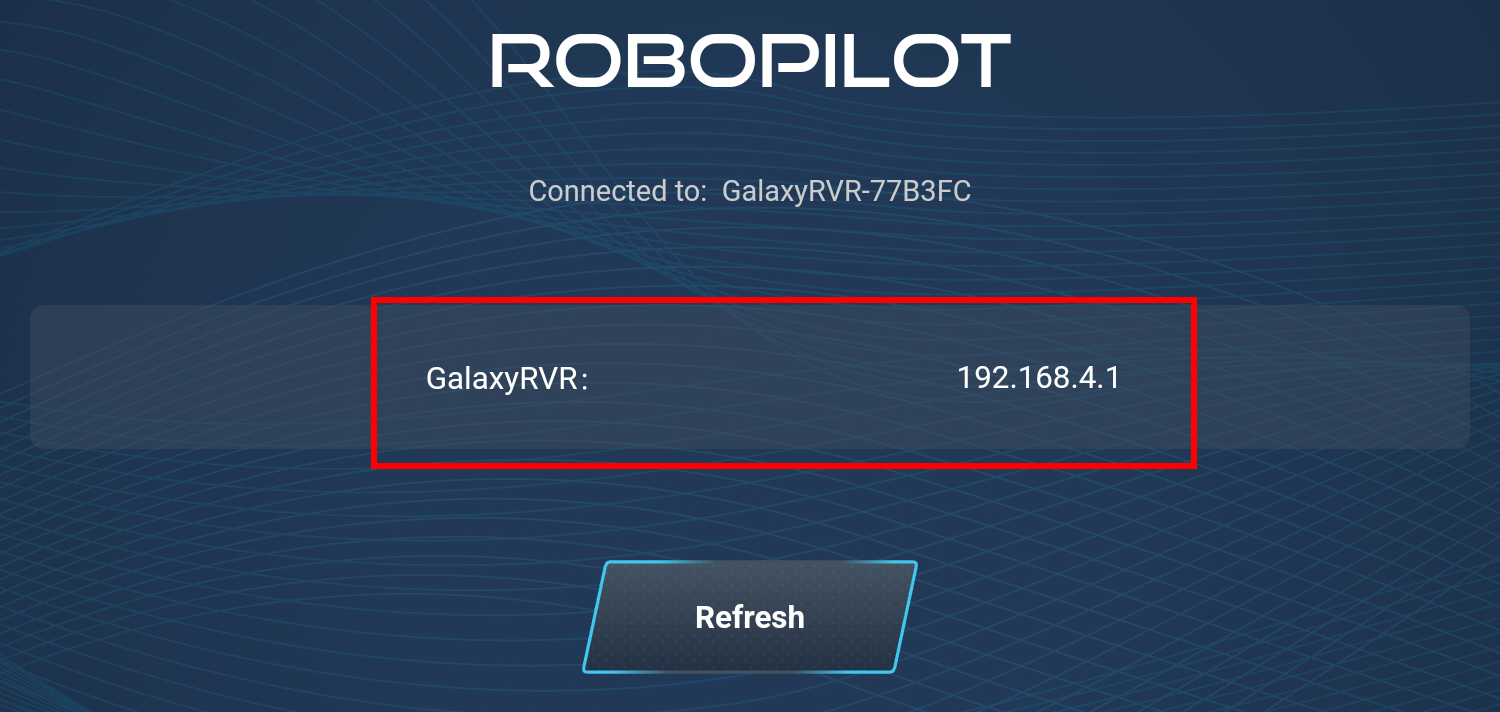
此时,请重置您的网络设置,然后点击与您的 GalaxyRVR 对应的 IP 以重新连接。