Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
Control by Remote
Zeus Car can be controlled with a remote control by turning the car on then pressing the buttons on the remote control directly. This method is stable and less susceptible to outside interference, but the control may not be as flexible.
Quick Guide
This is a quick tutorial video. Please watch the video first, and then follow the instructions provided below.
Let’s start the Zeus Car.
When first used or when the battery cable is unplugged, Zeus Car Shield will activate its over-discharge protection circuitry.
So you’ll need to plug in the Type-C cable for about 5 seconds.
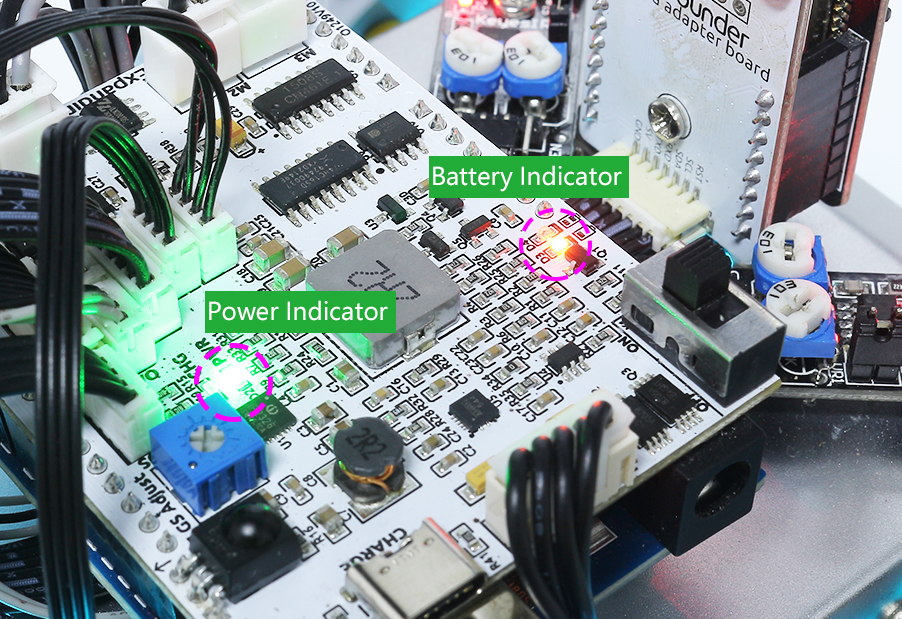
If the power indicator lights up, it means that the protection status has been released. At this time look at the battery indicators, if both battery indicators are off, please continue to plug in the Type-C cable to charge the battery.
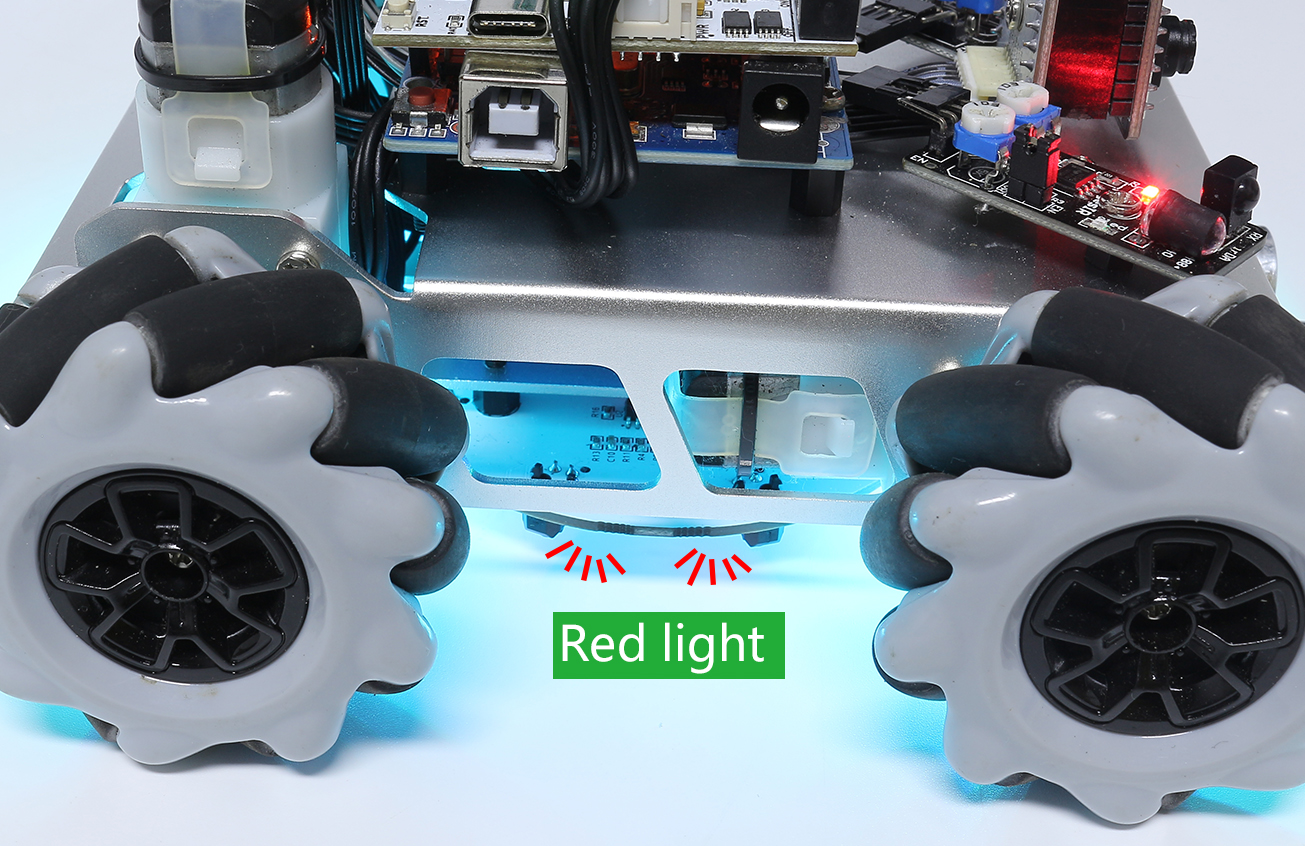
Now, you’ll need to flick the smaller switch to the right to establish communication between the car and the ESP32 CAM. Afterward, press the Reset button to reboot the code. At this point, you’ll observe the undercarriage lights transition from orange to a light blue.
Press the different keys on the remote control to control the car.

Stop: Stop all movements of the car.
Compass Calibration: Turn on compass calibration.
Line Track: Switching to line track mode.
Follow: Switching to follow mode.
Obstacle Avoidance: Switch to obstacle avoidance mode.
Drift Left/Right: Drift to the left/right.
Set Heading: After placing the car in one direction with your hand, click on this key to make this direction as the front of the car movement. This allows you to quickly specify a direction instead of slowly rotating the car to that direction with other keys.
Rotate Left/Right(Cycle/USD Key): Turn left/right
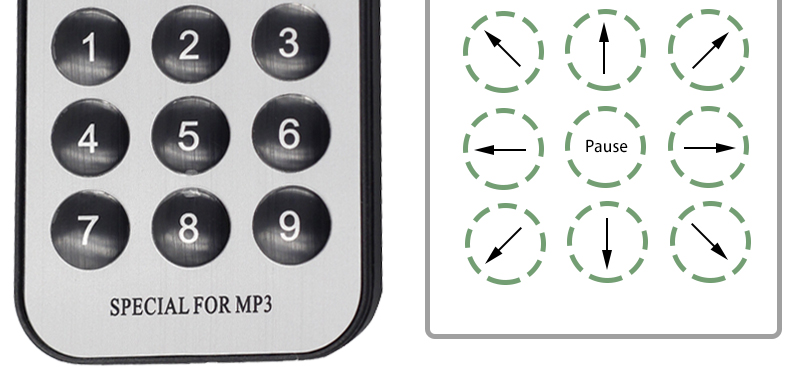
Move in All Directions(1 ~ 9): Control the car to move in all directions.
Pause: The function is basically the same as Stop, but if the head of the car is not facing the direction originally set, it will slowly move to the set direction.
Compass Calibration
Turn on compass calibration by pressing the  key.
key.
Place the Zeus car on the ground. Upon turning on the compass calibration, the car will start rotating counterclockwise and will stop in about 1 minute. If it rotates longer than 2 minutes, the magnetic field here is complicated. Try changing the location and calibrating again.
Line Track
Press the  key to switch to the line track mode.
key to switch to the line track mode.
Two modes of line track are available on the Zeus Car, one with its head always facing the direction of movement and one with its head facing a fixed direction. Here, the second mode is selected.
But before you can get it to follow the line, you need to calibrate the Omni Grayscale module and stick the line, as follows.
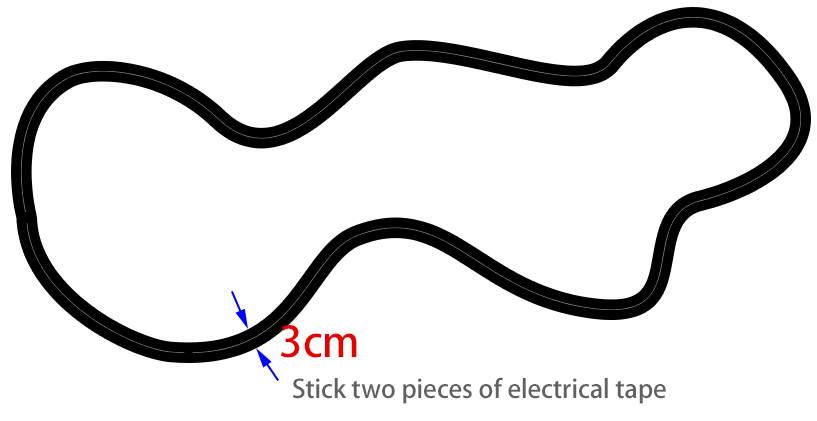
Stick a 3cm wide line
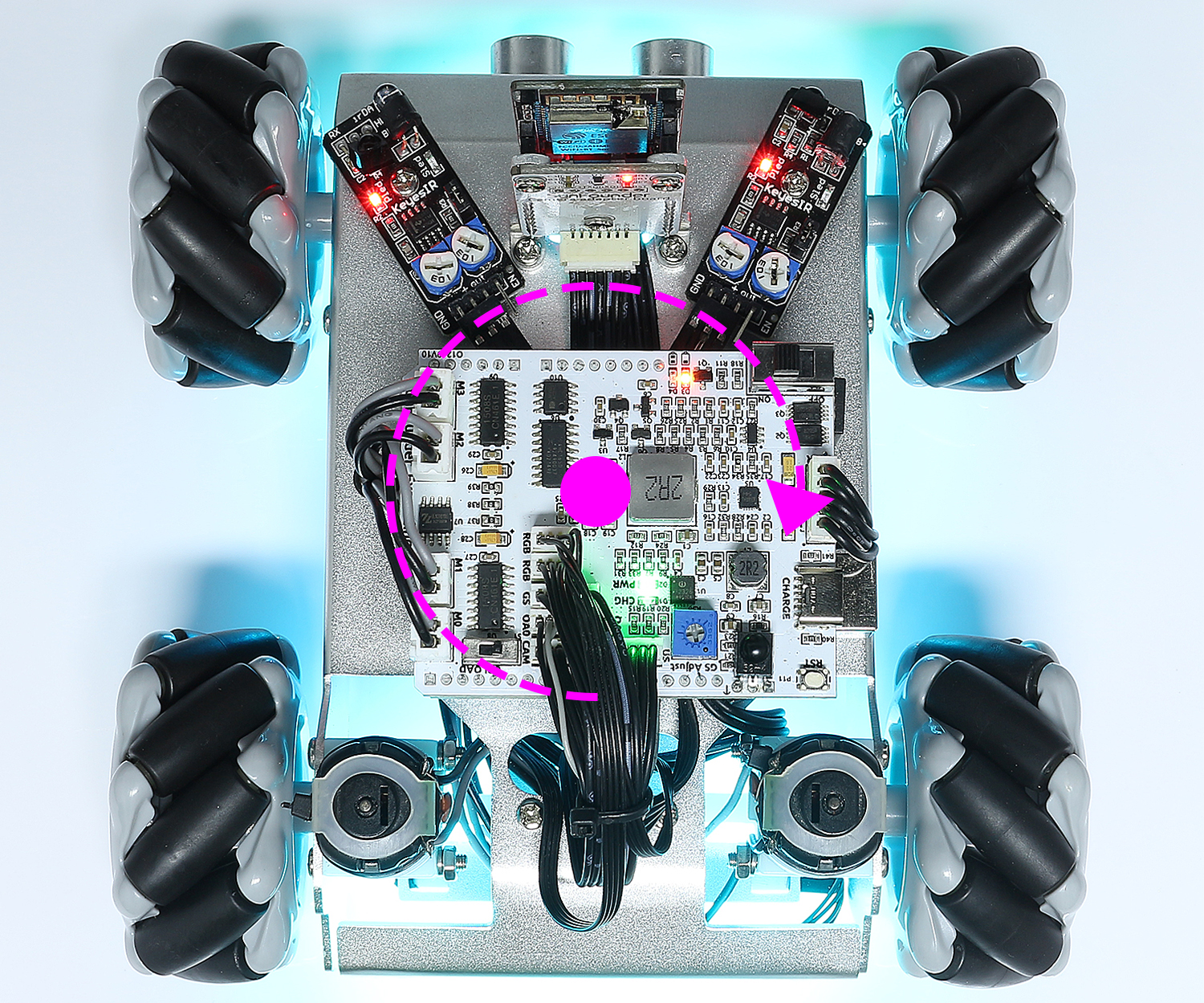
There are eight sensors on the Omni grayscale module, and the distance between each sensor is between 2 and 3 cm. There must be two sensors to detect the black line simultaneously. Therefore, the line you stick must be at least 3cm wide and the bend angle should not be less than 90°.
Calibrate the Omni Grayscale module.
Since each subfloor has different grayscale values, the factory-set grayscale threshold may not be appropriate for your current environment, so you will need to calibrate this module before use. It is recommended that you need to calibrate it whenever the floor color changes a lot.
Place the Zeus Car on white surface and turn the potentiometer until the gray sensor light is just illuminated.
Now let the two greyscale sensors on the side be located just between the black line and white surface, and slowly turn the potentiometer until the signal indicator just goes off.
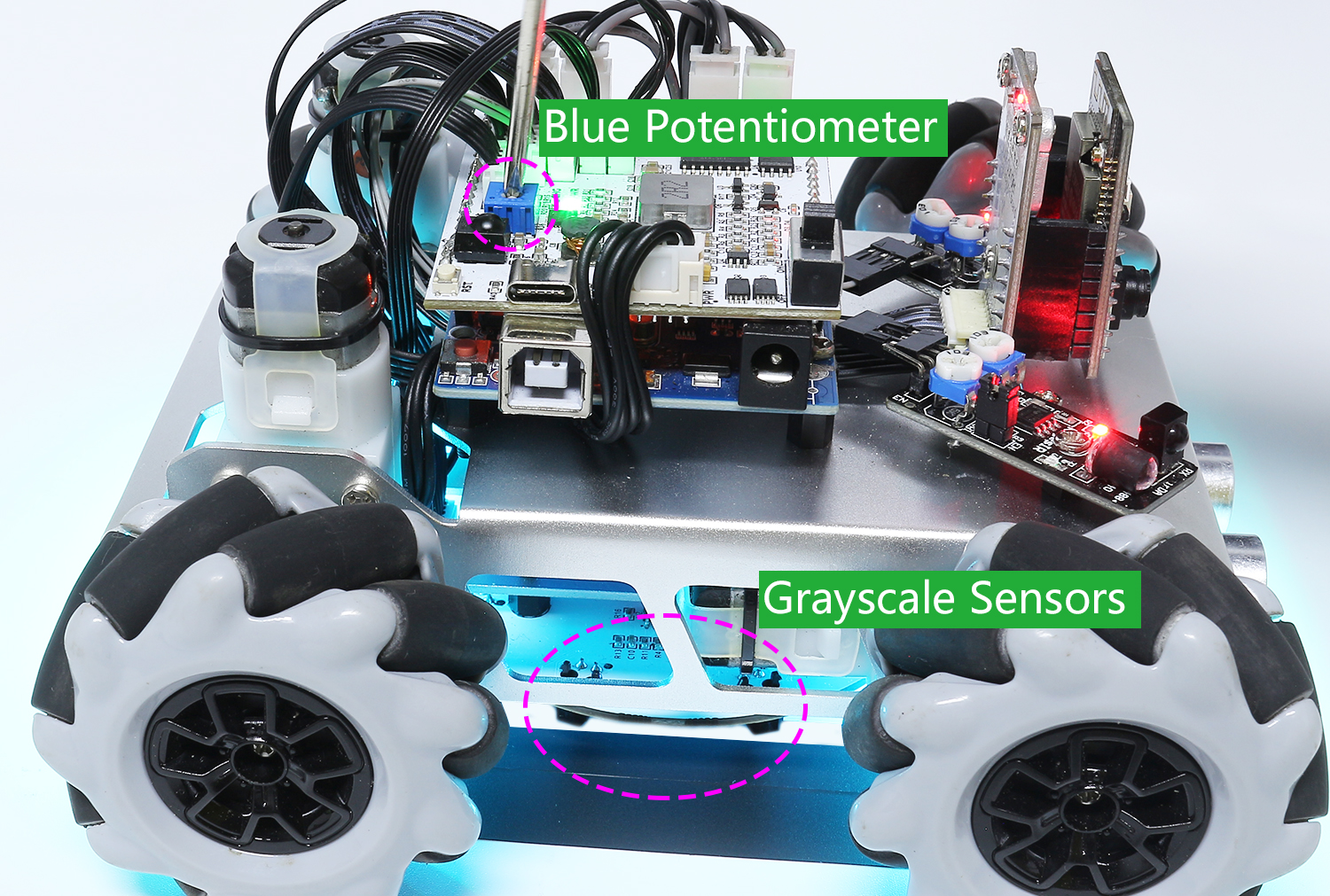
You can move repeatedly over the the black line and white surface to make sure that the lights of the greyscale sensor are off when they are between the the black line and white surface and on when they are on the white surface, indicating that the module is successfully calibrated.
Place the Zeus Car on your stickied line, press the
key, and it will track the line.Due to the high environmental requirements of the Omni grayscale module, it is recommended to calibrate it a few more times if the tracking effect is not satisfactory (off-track).
Follow
Press the  key to switch to follow mode.
key to switch to follow mode.
The ultrasonic sensor detects obstacles in front (20 cm) and follows them forward. These two obstacle avoidance modules allow the car to follow left or right, but they need to be calibrated (15cm) before use.
Calibrate the IR obstacle avoidance module.
Start by adjusting the right obstacle avoidance module. During transportation, collisions may cause the transmitter and receiver on the infrared module to tilt. Therefore, you need to manually straighten them.
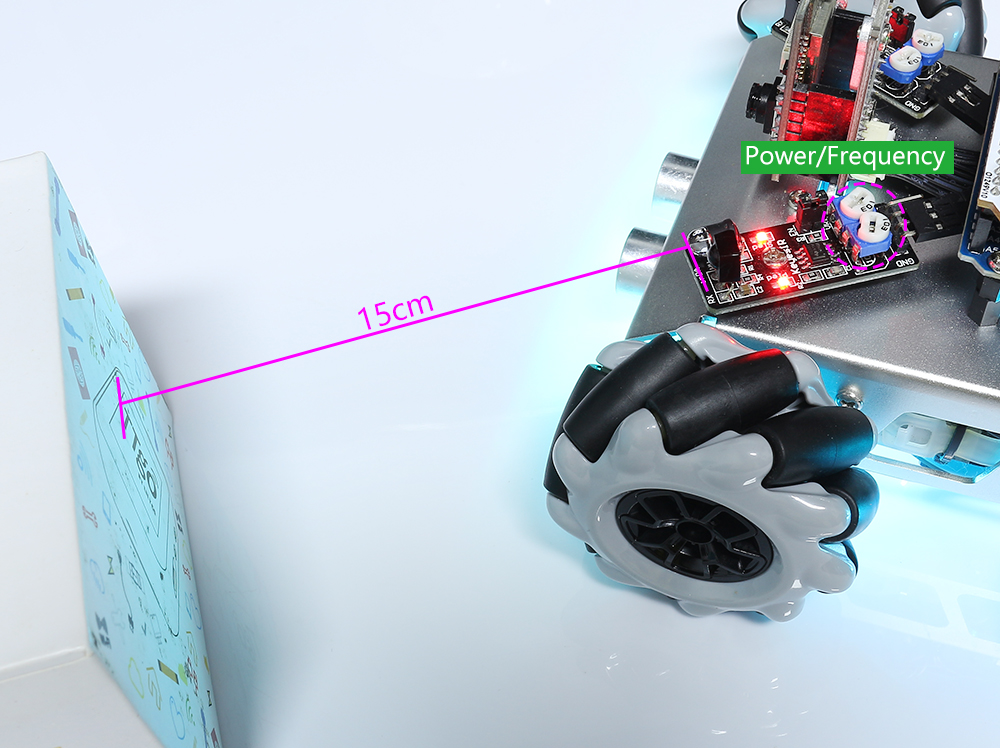
Place an obstacle about 15cm away from the IR obstacle avoidance module.
On the module are two potentiometers, one to adjust the sending power and one to adjust the sending frequency. By adjusting these two potentiometers, you can adjust the detection distance.
Then you can adjust a potentiometer, and if at 15cm, the signal light on the module illuminates, the adjustment is successful; if it doesn’t, adjust another potentiometer.
Calibrate the other obstacle avoidance module in the same way.
Place Zeus car on a table or the ground and let it follow your hand or other obstacles.
Obstacle Avoidance
When you want to go into obstacle avoidance mode, press the  key, but first reference the Follow to calibrate the two obstacle avoidance modules.
key, but first reference the Follow to calibrate the two obstacle avoidance modules.
Zeus car will move forward.
An ultrasonic module detects obstacles in front, if detected, the car turns left.
When the left obstacle avoidance module detects an obstacle, the car turns right, and when the right obstacle avoidance module detects an obstacle, the car turns left.
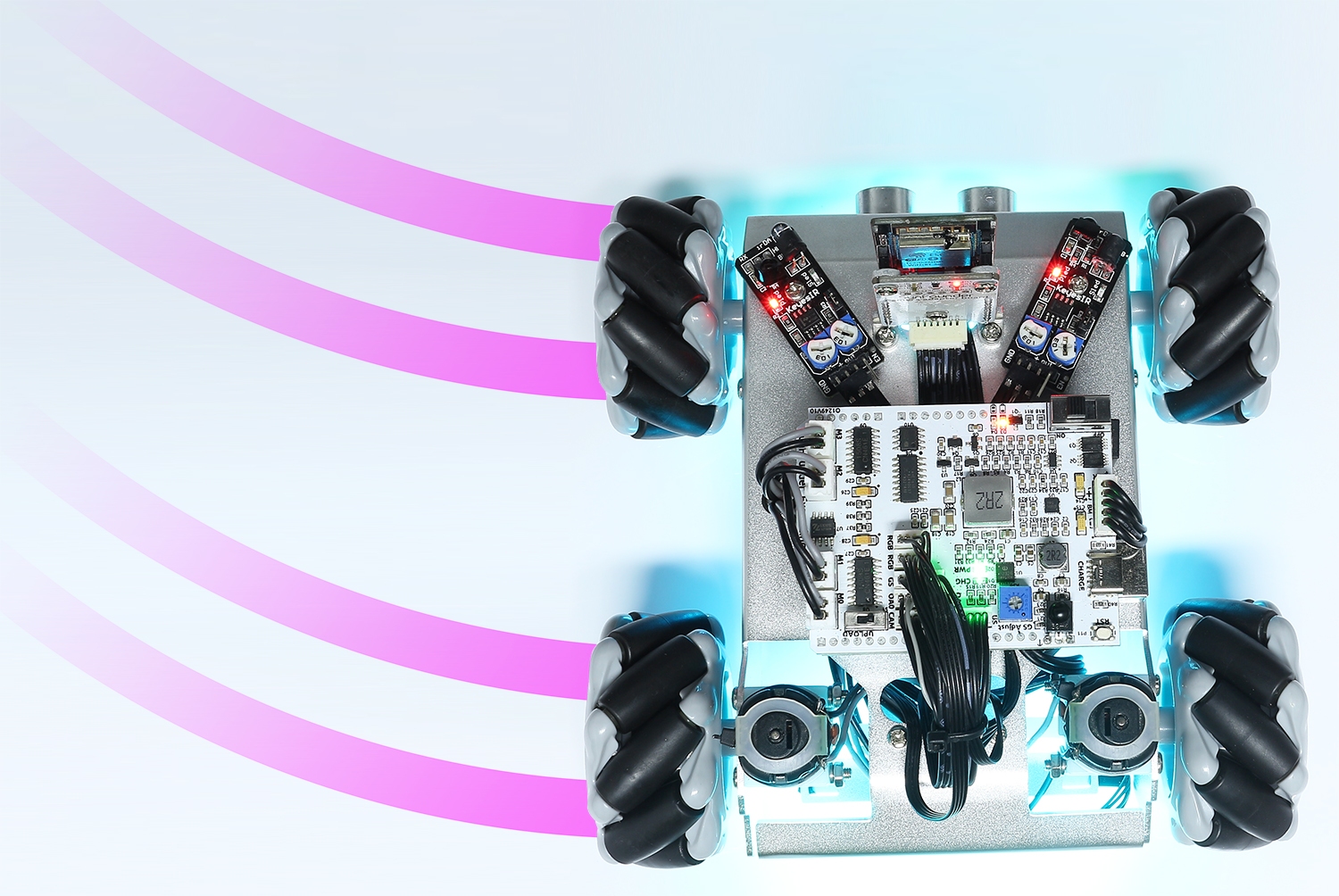
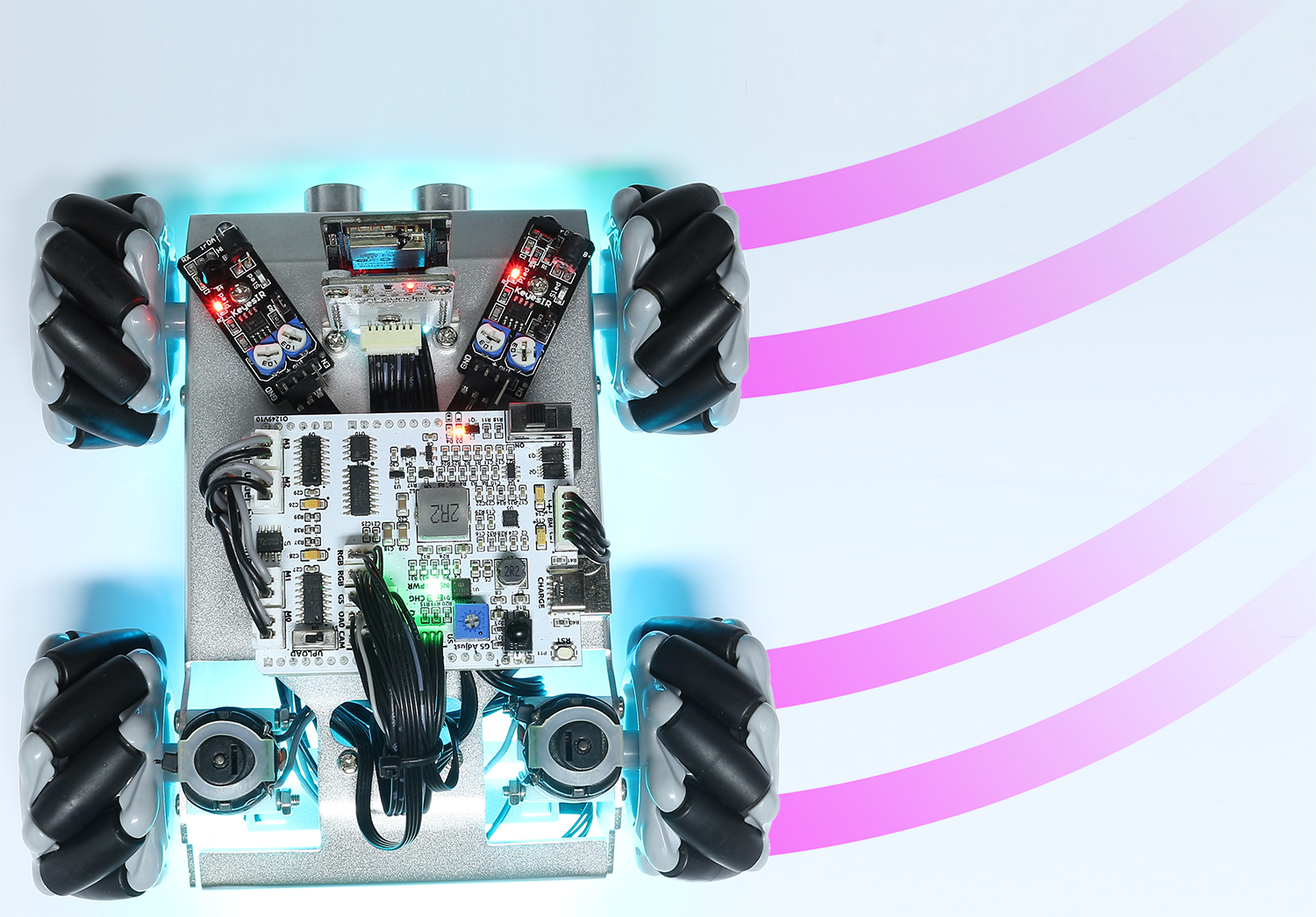
Drift Left/Right
Use the  and
and  keys to drift the car to the left/right.
keys to drift the car to the left/right.
Press the
key, the car will drift to the left.
Press the
key, the car will drift to the right.
If it was stopped before drifting, pressing the
or key once will cause the Zeus to drift 90° to the left or right.If it was moving before drifting, after pressing the key, the Zeus Car will drift 90° to the left or right, then pan until you press another key.
Move in All Directions(1 ~ 9)
Use the number keys 1~9 to make the Zeus Car move in 8 directions.
Rotate Left/Right(Cycle/USD Key)
The car will turn 45° left with the body as the center if you press
 once. Depending on the previous state, it will move forward or stop. If the previous state is stop, it will stop after 45° left turn; if it is forward, it will move forward after the left turn.
once. Depending on the previous state, it will move forward or stop. If the previous state is stop, it will stop after 45° left turn; if it is forward, it will move forward after the left turn.
Similarly, pressing
 once will make the car turn 45° to the right, and then it will move forward or stop depending on the previous state.
once will make the car turn 45° to the right, and then it will move forward or stop depending on the previous state.