Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
Q&A¶
Q1: How can we know the servo is damaged?
In Servo Test step, if the servo rocker arm shake, get stuck or can not rotate smoothly, with an abnormal sound, we can judge it as a damaged one.
Q2: Why the Sloth reboots in running?
If the Sloth is in lower power, rebooting will happen, please charge the battery in time.
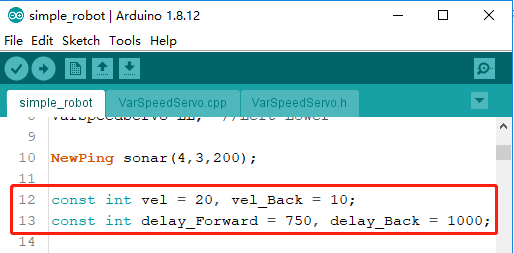
It could be the servos are lacking for power. Open the program and go to Line 12, 13.
velis the servos rotating speed in initialization or moving forward;vel_Backis the servos rotating speed in moving backward;delay_Forward,delay_Backare the delays between two moving forward loops and moving backward loops.If rebooting happens in moving forward actions, you can decrease the value of
veland increase the value ofdelay_Forward. For example, decreasevelvalue to 10, and increasedelay_Forwardto 1500.If rebooting happens in moving backward actions, you can decrease
vel_Backand increasedelay_Backward. For instance, decreasevel_Backto 8, and increasedelay_Backwardto 1500. You can adjust to a proper value as you want. Then click Upload.
Q3: Sloth walks too slowly when it moves forward. How to solve this?
A3: Sloth’s default speed is middle speed, the related sketch is vel(mid), delay_Forward(mid) = (20, 750). You can change the speed value as shown below to adjust the walking speed.
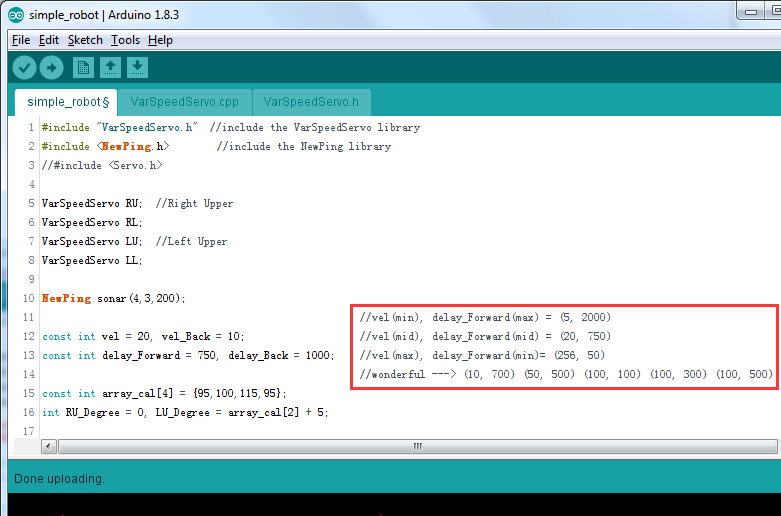
change the value of vel and delay_Forward in line12 and 13 to as shown:
vel = 50, delay_Forward = 500
Then click Upload.
Note
If you adjust the robot to a high walking speed, it may fall down and break. Thus it’s better to do some protection for the Sloth.
Q4: Sloth walks too slowly when it moves backward. How to solve this?
Considering the structure of Sloth, it’s better do adjust a slow speed for backward walking. If you want to adjust the walking speed, refer to Q3 to adjust the value. DO NOT adjust a high speed for walking backward to avoid possible falling down.
Q5: How to make the sloth more stable in walking?
Cut to get two paper cushion for the robot feet, and stick them on the Sloth soles to maintain enough friction for a stable walking.
Q6: What is macro definition (``#define``)?
The #define creates a macro, which is the association of an identifier or parameterized identifier with a token string. After the macro is defined, the compiler can substitute the token string for each occurrence of the identifier in the source file.
You can use the #ifdef directives anywhere #if can be used. The #ifdef identifier statement is equivalent to #if 1 when identifier has been defined. It’s equivalent to #if 0 when identifier hasn’t been defined, or has been undefined by the #undef directive. These directives check only for the presence or absence of identifiers defined with #define, not for identifiers declared in the C or C++ source code.
In sloth code, we use #define and #ifdef to start corresponding functions.
Q7: Why is my sloth not working and the battery is getting hot?
Warning
Due to an unfortunate manufacturing error, the polarity of some battery connectors has been reversed, which may cause overheating when using 9V battery.
To prevent any safety risks or damage to the product, please carefully check the polarity of the battery connectors before inserting a 9V battery.
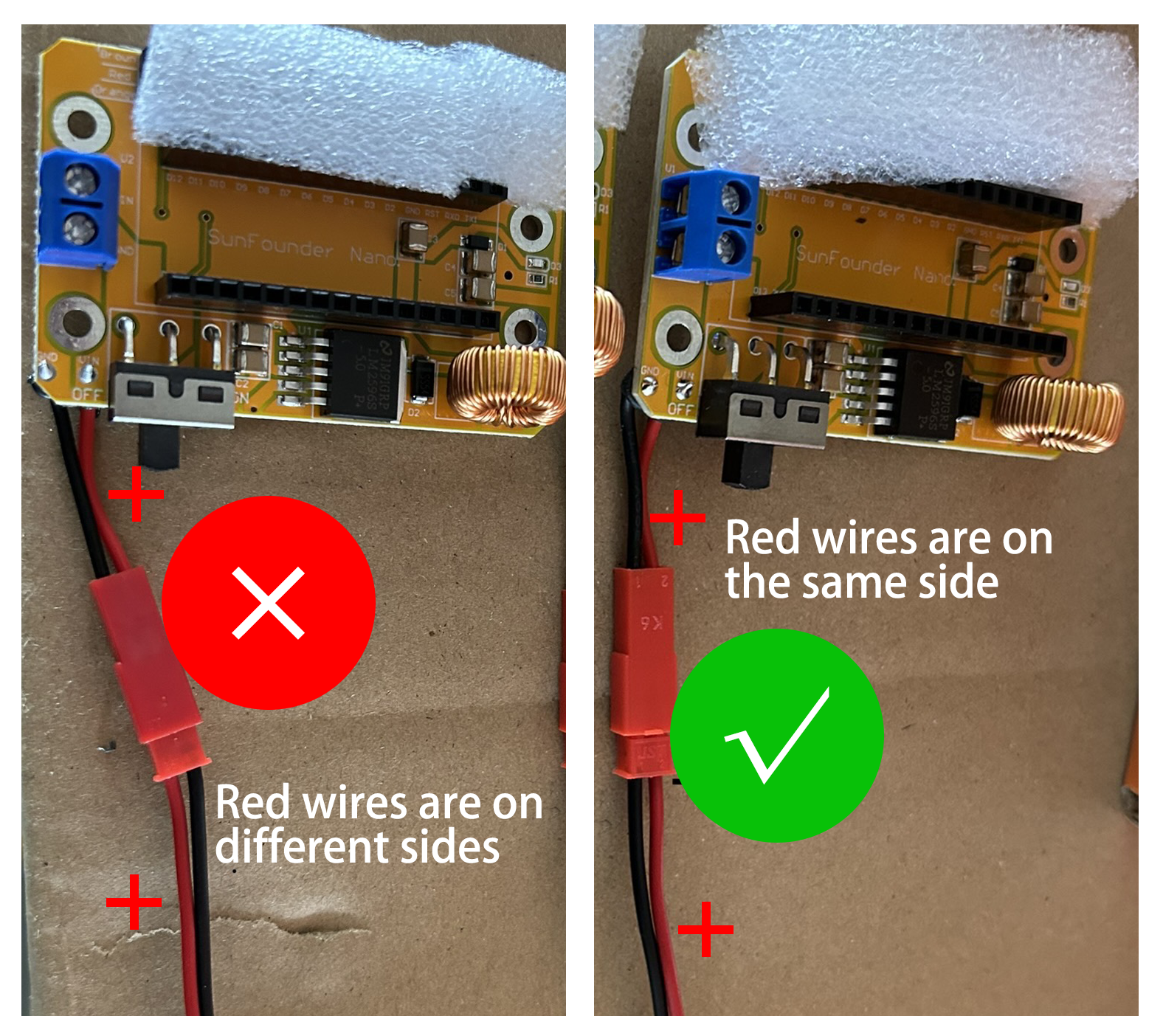
If you find that the battery connector is reversed, please do not attempt to complete the installation. Instead, please contact our customer support team. We will replace it for you as soon as possible.
Email: cs@sunfounder.com