DIY Car¶
In addition to being suitable for simple experiments, the Robot HAT is ideal for use as a central controller in robotics, such as for smart cars.
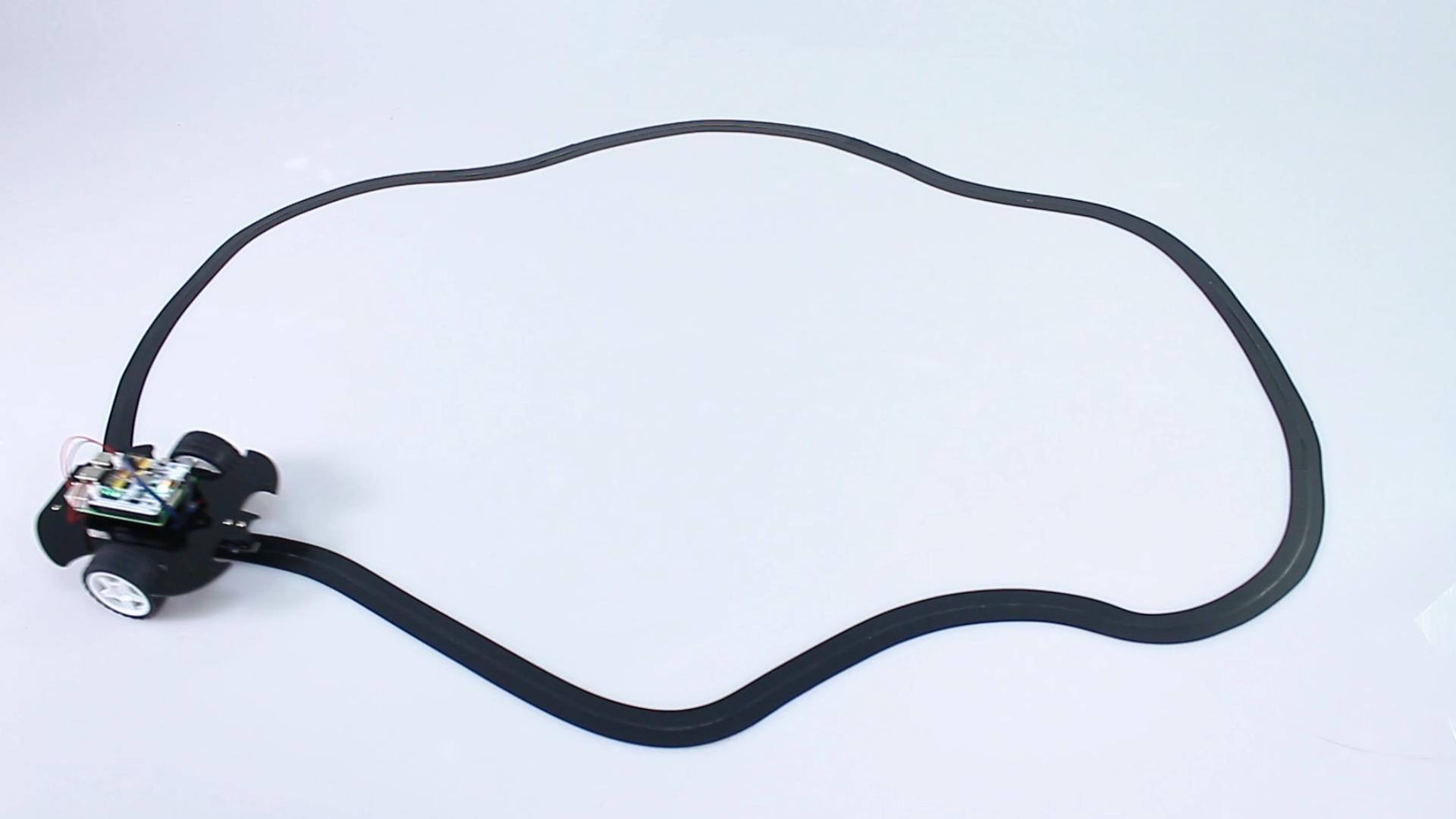
In this project, we built a simple line-following car.
Code
from robot_hat import Motors, Pin
import time
# Create motor object
motors = Motors()
# Initialize line tracking sensor
line_track = Pin('D0')
def main():
while True:
# print("value", line_track.value())
# time.sleep(0.01)
if line_track.value() == 1:
# If line is detected
motors[1].speed(-60) # Motor 1 forward
motors[2].speed(20) # Motor 2 backward
time.sleep(0.01)
else:
# If line is not detected
motors[1].speed(-20) # Motor 1 backward
motors[2].speed(60) # Motor 2 forward
time.sleep(0.01)
def destroy():
# Stop motors when Ctrl+C is pressed
motors.stop()
print("Motors stopped.")
if __name__ == '__main__':
try:
main()
except KeyboardInterrupt:
destroy()