注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
2.2.9 MPU6050モジュール
はじめに
MPU-6050は、スマートフォン、タブレット、ウェアラブルセンサー向けに設計された、世界初かつ唯一の6軸モーショントラッキングデバイス(3軸ジャイロスコープと3軸加速度センサー)です。これらの特長には、低電力、低コスト、および高性能の要件が含まれます。
この実験では、I2Cを使用してMPU6050の三軸加速度センサと三軸ジャイロスコープの値を取得し、画面に表示します。
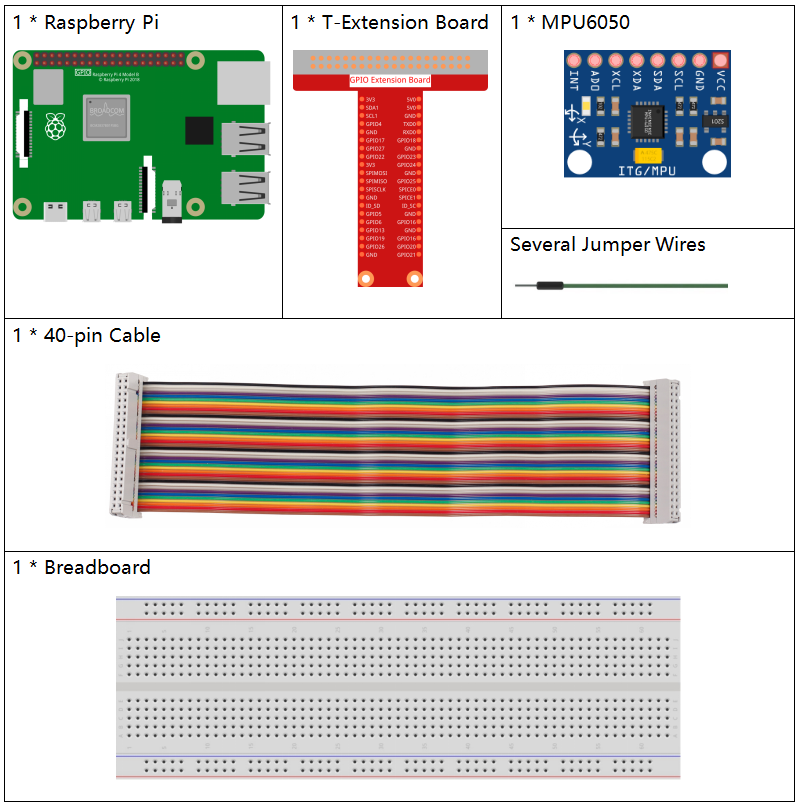
必要な部品
このプロジェクトでは、以下の部品が必要です。
一式を購入するのが便利です、リンクはこちら:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
Raphael Kit |
337 |
以下のリンクから個別に購入することもできます。
コンポーネントの紹介 |
購入リンク |
|---|---|
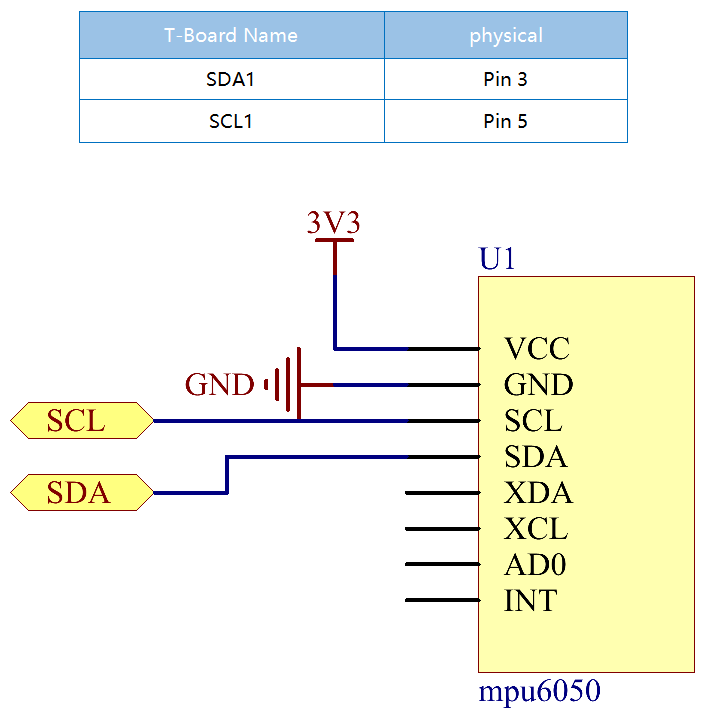
回路図
MPU6050はI2Cバスインターフェースを介してマイクロコントローラと通信します。SDA1およびSCL1は対応するピンに接続する必要があります。
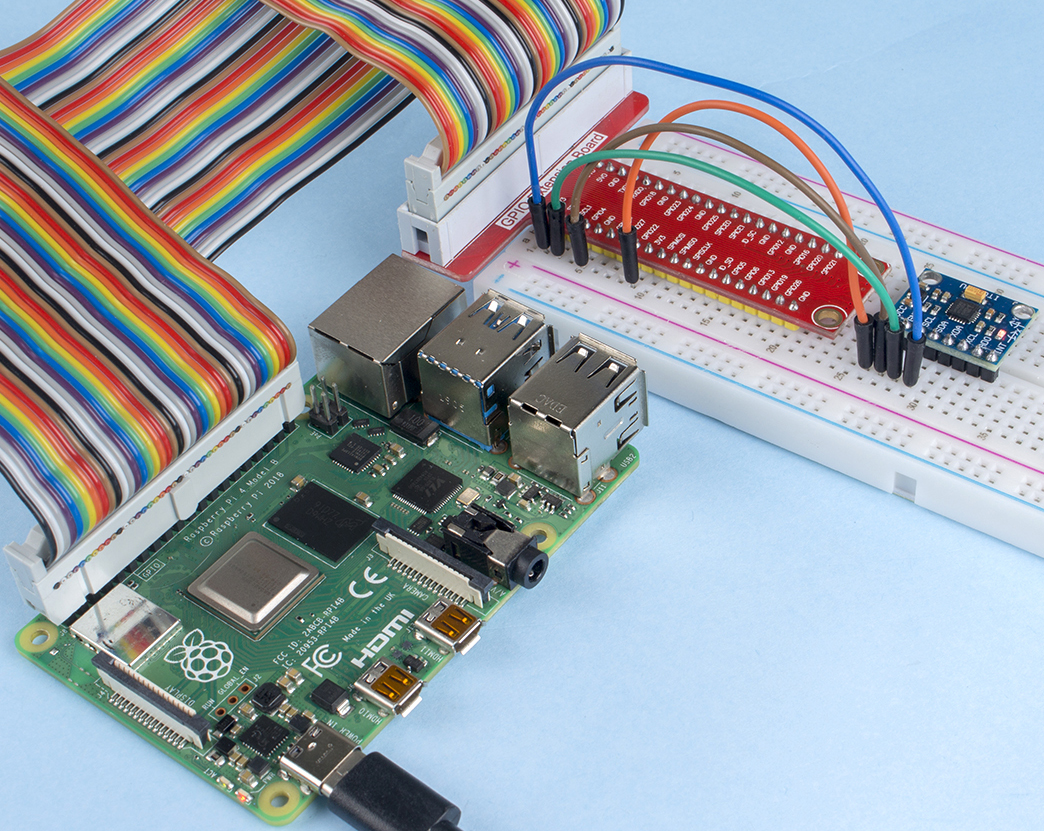
実験手順
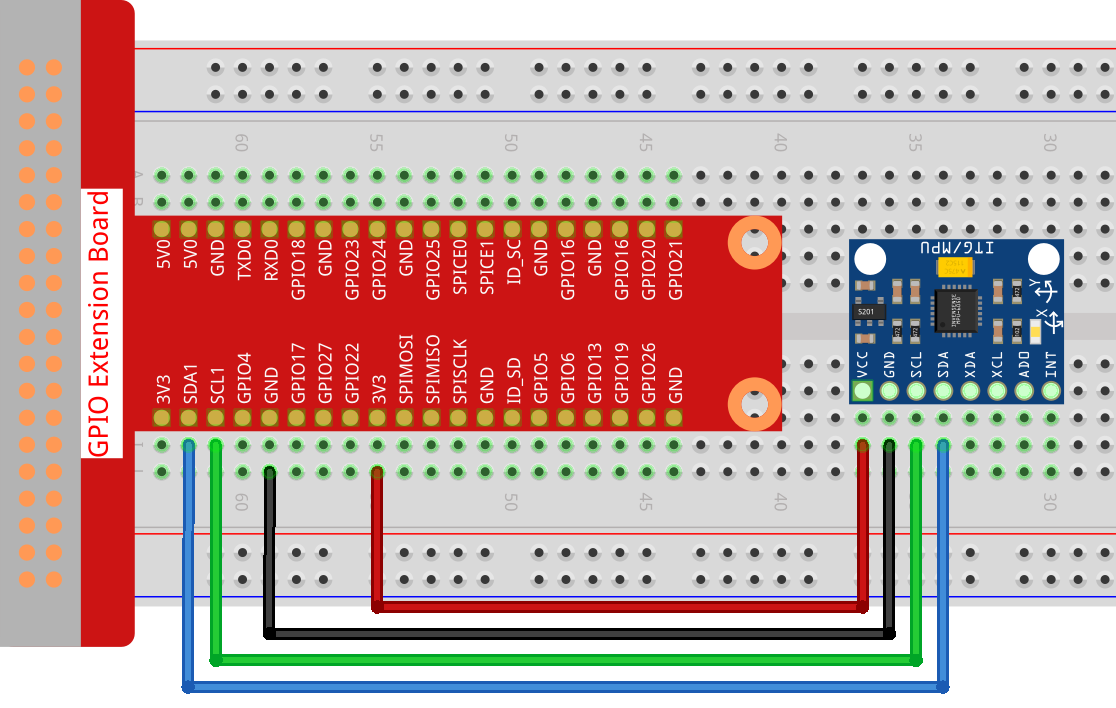
ステップ1: 回路を組む。
ステップ2:I2Cの設定(付録 I²C 設定 を参照。I2Cを設定済みの場合は、このステップをスキップしてください。)
ステップ3: コードのフォルダに移動。
cd ~/raphael-kit/nodejs/
ステップ4: 依存関係をインストール。
sudo npm install mpu6050-gyro
ステップ5: コードを実行。
sudo node mpu6050_module.js
コードを実行すると、MPU6050で読み取られた各軸上の加速度、角速度、およびx軸とy軸の偏差角が計算された後、画面に表示されます。
コード
var gyro = require("mpu6050-gyro");
var address = 0x68; //MPU6050 address
var bus = 1; //i2c bus used
var gyro = new gyro( bus,address );
async function update_telemetry() {
var gyro_xyz = gyro.get_gyro_xyz();
var accel_xyz = gyro.get_accel_xyz();
var gyro_data = {
gyro_xyz: gyro_xyz,
accel_xyz: accel_xyz,
rollpitch: gyro.get_roll_pitch( gyro_xyz, accel_xyz )
}
console.log(gyro_data);
setTimeout(update_telemetry, 500);
}
if ( gyro ) {
update_telemetry();
}
コード説明
var gyro = require("mpu6050-gyro");
var address = 0x68; //MPU6050 address
var bus = 1; //i2c bus used
var gyro = new gyro( bus,address );
mpu6050-gyro モジュールをインポートし、MPU6050のアドレスとジャイロのバス作成オブジェクトを決定します。
モジュール内のカプセル化された関数を呼び出すのが便利です。
注釈
このモジュールに関しては、以下を参照してください: https://www.npmjs.com/package/mpu6050-gyro
var gyro_xyz = gyro.get_gyro_xyz();
var accel_xyz = gyro.get_accel_xyz();
var gyro_data = {
gyro_xyz: gyro_xyz,
accel_xyz: accel_xyz,
rollpitch: gyro.get_roll_pitch( gyro_xyz, accel_xyz )
}
console.log(gyro_data);
setTimeout(update_telemetry, 500);
モジュールは、利用可能な3つの関数をカプセル化しています:
gyro.get_gyro_xyz(): ジャイロスコープからの生のx,y,zデータを持つJSONオブジェクトを返します。
gyro.get_accel_xyz(): 加速度計からの生のx,y,zデータを持つJSONオブジェクトを返します。
gyro.get_roll_pitch( gyro_xyz, accel_xyz ): ロールとピッチを度で表したJSONオブジェクトを返します。
現象の画像