注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
2.2.5 IR障害物回避モジュール
はじめに
このプロジェクトでは、IR障害物回避モジュールについて学びます。これは、短い距離での障害物を検出できるセンサーモジュールであり、干渉が少なく、組み立てやすく、使用が簡単などの特長があります。ロボットの障害物回避、回避カート、組み立てラインのカウントなど、幅広く使用されています。
必要な部品
このプロジェクトでは、以下の部品が必要です。
キット全体を購入するのは非常に便利です。リンクは以下のとおりです:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
Raphael Kit |
337 |
以下のリンクから個別に購入することもできます。
コンポーネントの紹介 |
購入リンク |
|---|---|
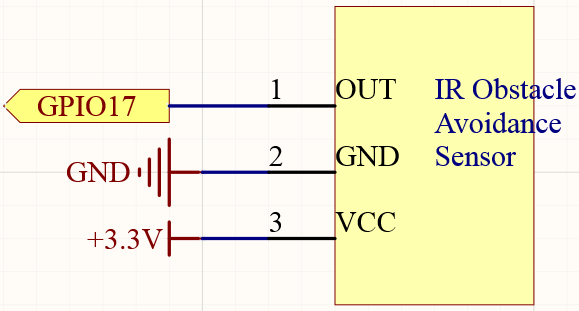
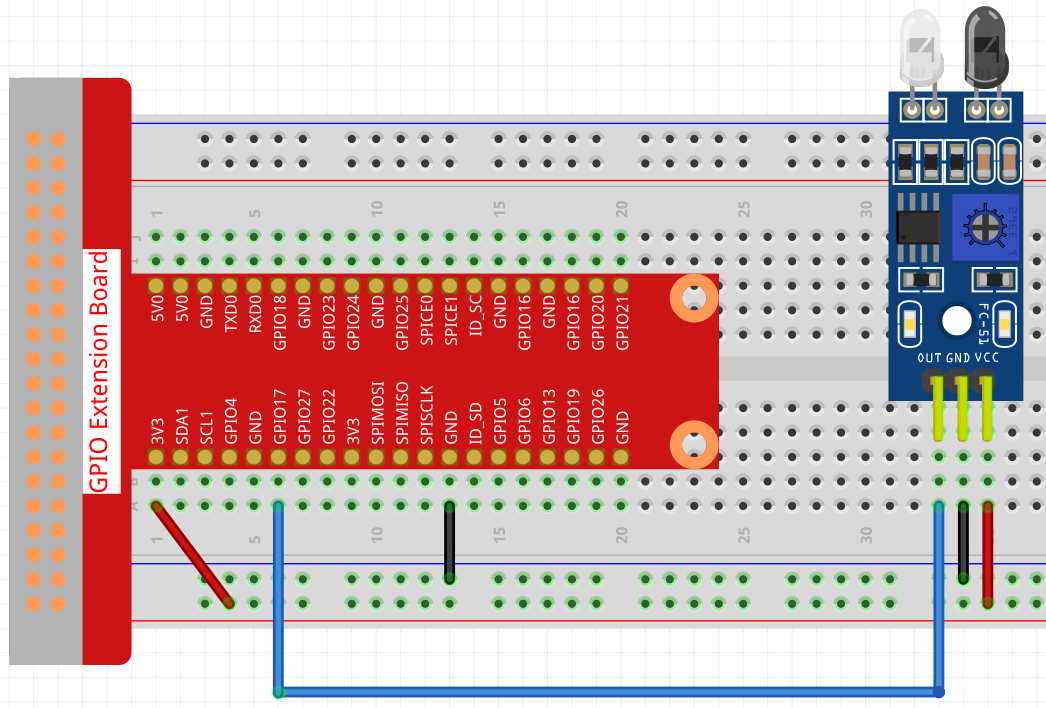
回路図
実験手順
ステップ1: 回路を組む。
ステップ2: ディレクトリを変更します。
cd ~/raphael-kit/c/2.2.5/
ステップ3: コンパイルします。
gcc 2.2.5_IrObstacle.c -lwiringPi
ステップ4: 実行します。
sudo ./a.out
コードが実行されると、モジュールのプローブの前に手を置くと、モジュール上の出力インジケータが点灯し、「Detected Barrier!」が画面に繰り返し表示されます。
注釈
実行後に動作しない、またはエラープロンプト「wiringPi.h: No such file or directory」が表示される場合は、 WiringPiのインストールと確認 を参照してください。
コード
#include <wiringPi.h>
#include <stdio.h>
#define ObstaclePin 0
void myISR(void)
{
printf("Detected Barrier !\n");
}
int main(void)
{
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen
printf("setup wiringPi failed !\n");
return 1;
}
if(wiringPiISR(ObstaclePin, INT_EDGE_FALLING, &myISR) < 0){
printf("Unable to setup ISR !!!\n");
return 1;
}
while(1){
;
}
return 0;
}
コード説明
void myISR(void)
{
printf("Detected Barrier !\n");
}
myISR() 関数を定義し、「障害物を検出」を表示して、障害物が検出されたことを示します。
if(wiringPiISR(ObstaclePin, INT_EDGE_FALLING, &myISR) < 0){
printf("Unable to setup ISR !!!\n");
return 1;
}
この wiringPiISR() 関数は、指定された ObstaclePin で割り込みを受け取るための myISR() 関数を登録します。
ObstaclePinが高から低に変わると、障害物が検出されたことを意味します。この時、「Detected Barrier !」を表示するために myISR() 関数を呼び出します。
この wiringPiISR() 関数のプロトタイプは以下の通りです。
int wiringPiISR (int pin, int edgeType, void (*function)(void)) ;
edgeTypeパラメータは INT_EDGE_FALLING 、 INT_EDGE_RISING 、 INT_EDGE_BOTH 、または INT_EDGE_SETUP のいずれかです。もし INT_EDGE_SETUP の場合、ピンの初期化は行われません。ピンの設定はすでに他の場所(例:gpioプログラム)で行われていると想定されます。しかし、他のタイプのいずれかを指定した場合、ピンは指定された通りにエクスポートおよび初期化されます。
詳細については、以下を参照してください: wiringPi-Functions (API)。
現象の画像
