注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
2.1.9 ジョイスティック
注釈

キットのバージョンによって、 ADC0834 または MCP3008 が含まれています。 該当するセクションを選択してください。
はじめに
このプロジェクトでは、ジョイスティックの動作について学びます。ジョイスティックを操作し、結果を画面に表示します。
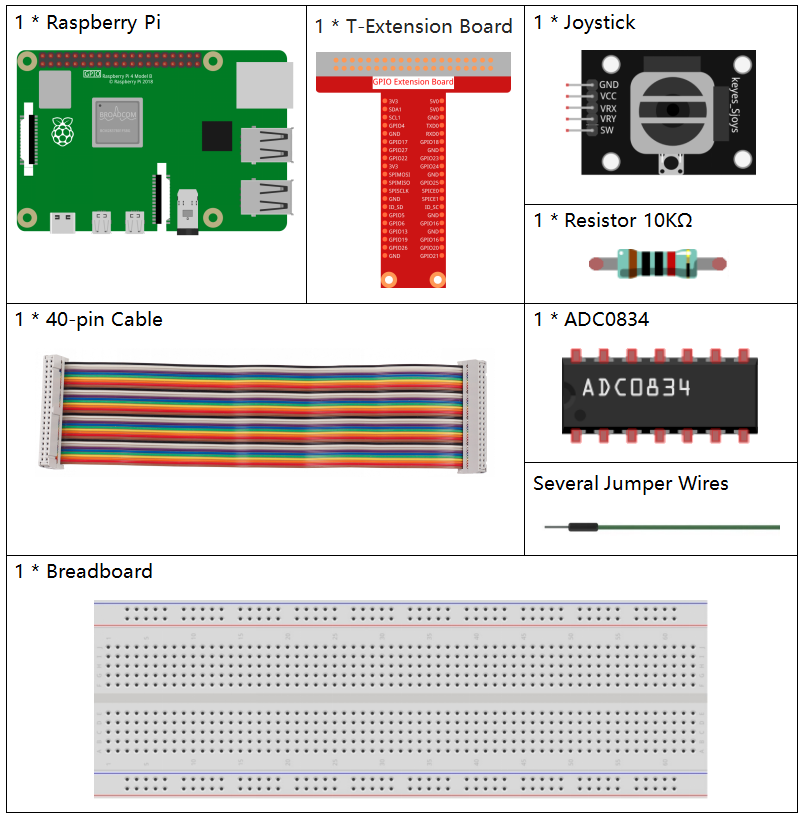
必要な部品
このプロジェクトには、以下の部品が必要です。
一式をまとめて購入するのが便利です。以下のリンクから購入できます:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
Raphael Kit |
337 |
以下のリンクから個別に購入することもできます。
コンポーネントの紹介 |
購入リンク |
|---|---|
- |
|
- |
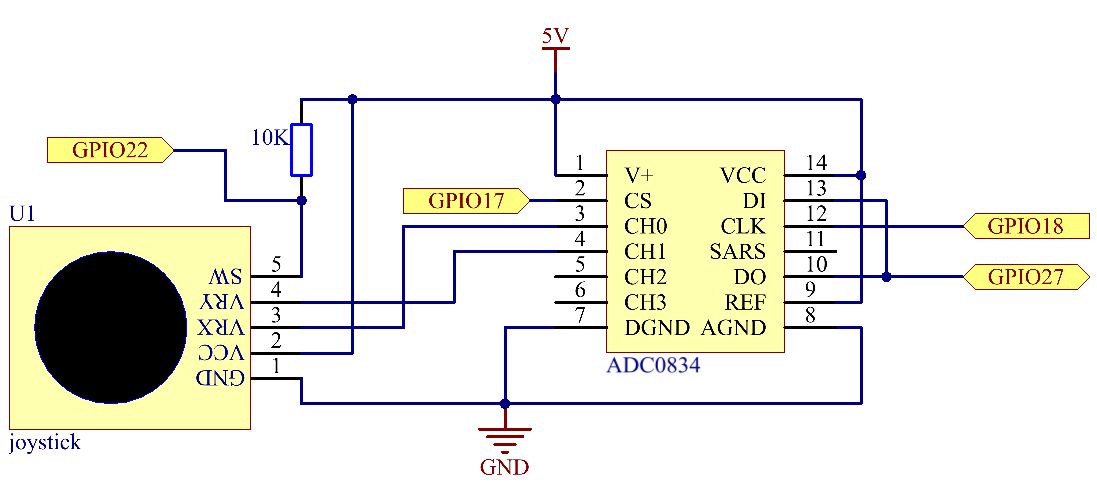
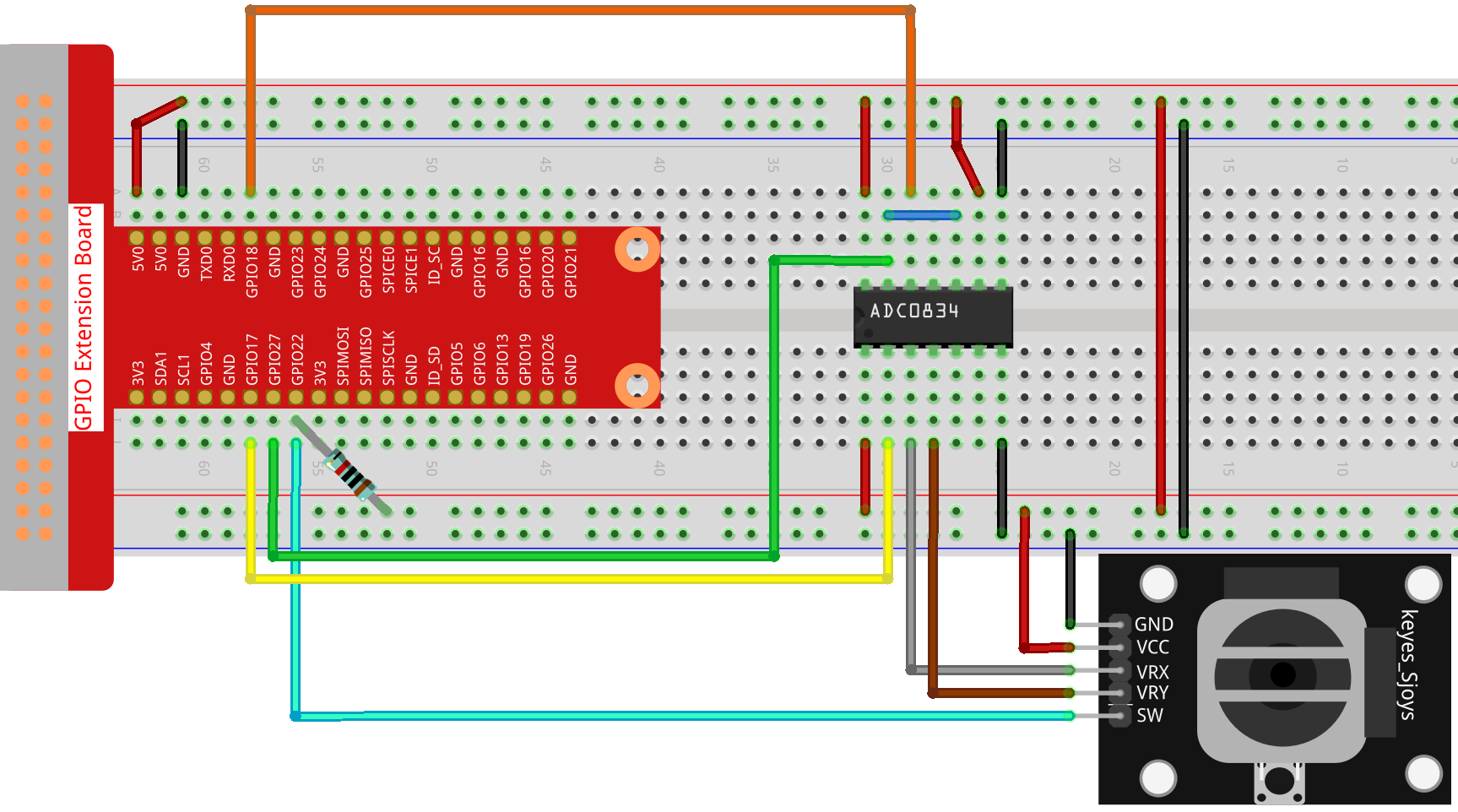
回路図
ジョイスティックのデータを読み取る際、軸ごとにいくつかの違いがあります:X軸とY軸のデータはアナログで、アナログ値をデジタル値に変換するためにADC0834を使用する必要があります。Z軸のデータはデジタルで、GPIOを使用して直接読み取ることも、ADCを使用して読み取ることもできます。
実験手順
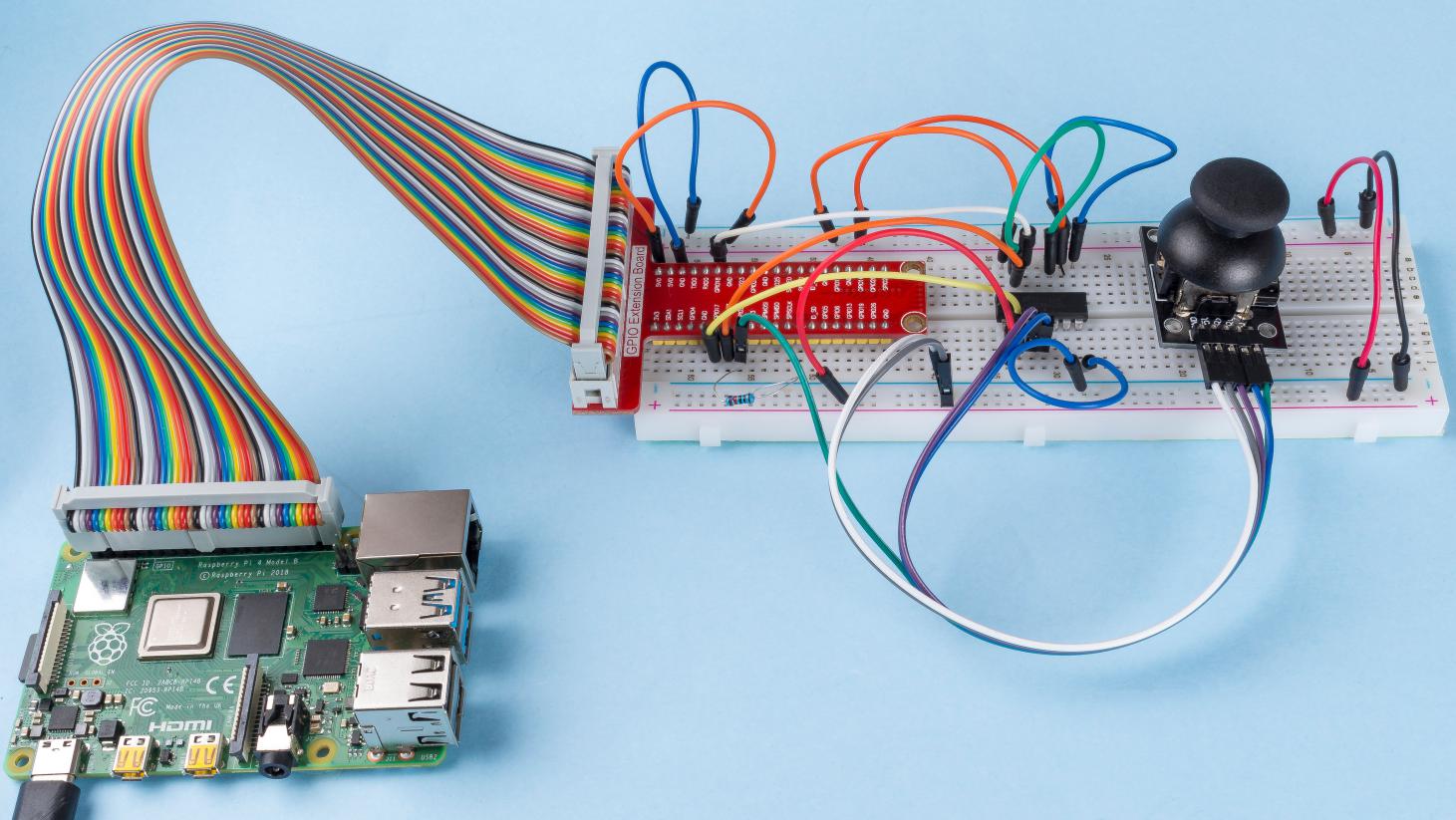
ステップ1: 回路を組む。
ステップ2: コードのフォルダに移動します。
cd ~/raphael-kit/c/2.1.9/
ステップ3: コードをコンパイルする。
gcc 2.1.9_Joystick.c -lwiringPi
ステップ4: 実行ファイルを実行する。
sudo ./a.out
コードが実行された後、ジョイスティックを回すと、x、y、Btnの対応する値が画面に表示されます。
注釈
実行後に動作しない、または「wiringPi.h: No such file or directory」というエラープロンプトが表示された場合は、 WiringPiのインストールと確認 を参照してください。
コード
#include <wiringPi.h>
#include <stdio.h>
#include <softPwm.h>
typedef unsigned char uchar;
typedef unsigned int uint;
#define ADC_CS 0
#define ADC_CLK 1
#define ADC_DIO 2
#define BtnPin 3
uchar get_ADC_Result(uint channel)
{
uchar i;
uchar dat1=0, dat2=0;
int sel = channel > 1 & 1;
int odd = channel & 1;
digitalWrite(ADC_CLK, 1);
delayMicroseconds(2);
digitalWrite(ADC_CLK, 0);
delayMicroseconds(2);
pinMode(ADC_DIO, OUTPUT);
digitalWrite(ADC_CS, 0);
// Start bit
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
//Single End mode
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// ODD
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,odd); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
//Select
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,sel); delayMicroseconds(2);
digitalWrite(ADC_CLK,1);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
}
int main(void)
{
uchar x_val;
uchar y_val;
uchar btn_val;
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen
printf("setup wiringPi failed !");
return 1;
}
pinMode(BtnPin, INPUT);
pullUpDnControl(BtnPin, PUD_UP);
pinMode(ADC_CS, OUTPUT);
pinMode(ADC_CLK, OUTPUT);
while(1){
x_val = get_ADC_Result(0);
y_val = get_ADC_Result(1);
btn_val = digitalRead(BtnPin);
printf("x = %d, y = %d, btn = %d\n", x_val, y_val, btn_val);
delay(100);
}
return 0;
}
コード説明
uchar get_ADC_Result(uint channel)
{
uchar i;
uchar dat1=0, dat2=0;
int sel = channel > 1 & 1;
int odd = channel & 1;
digitalWrite(ADC_CLK, 1);
delayMicroseconds(2);
digitalWrite(ADC_CLK, 0);
delayMicroseconds(2);
pinMode(ADC_DIO, OUTPUT);
digitalWrite(ADC_CS, 0);
// Start bit
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
//Single End mode
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
......
この関数の動作プロセスは、2.1.7 ポテンショメータで詳しく説明されています。
while(1){
x_val = get_ADC_Result(0);
y_val = get_ADC_Result(1);
btn_val = digitalRead(BtnPin);
printf("x = %d, y = %d, btn = %d\n", x_val, y_val, btn_val);
delay(100);
}
ジョイスティックのVRXとVRYは、ADC0834のCH0とCH1にそれぞれ接続されています。したがって、関数getResult()はCH0とCH1の値を読み取るために呼び出されます。次に、読み取った値を変数x_valとy_valに格納する必要があります。さらに、ジョイスティックのSWの値を読み取り、変数Btn_valに格納します。最後に、x_val、y_val、およびBtn_valの値をprint()関数を使用して表示します。
現象の画像