注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
2.1.6 ロータリーエンコーダモジュール
はじめに
このプロジェクトでは、ロータリーエンコーダについて学びます。ロータリーエンコーダは、厳格なタイミングのシーケンスで一定のパルスのセットを持つ電子スイッチです。ICと組み合わせて使用することで、インクリメント、デクリメント、ページのターンなどの操作を実現することができます。マウスのスクロール、メニューの選択などの操作も含まれます。
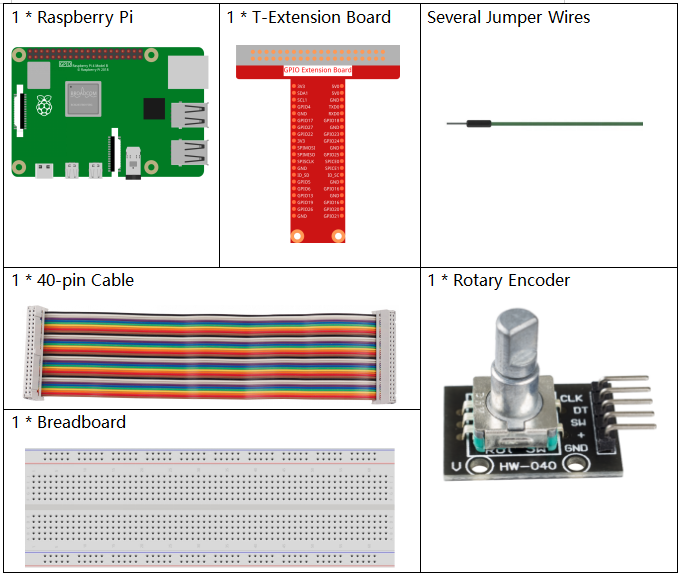
必要な部品
このプロジェクトでは、以下のコンポーネントが必要です。
全てのキットを購入するのは非常に便利です。以下がリンクです:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
Raphael Kit |
337 |
以下のリンクからそれぞれ別々に購入することもできます。
コンポーネントの紹介 |
購入リンク |
|---|---|
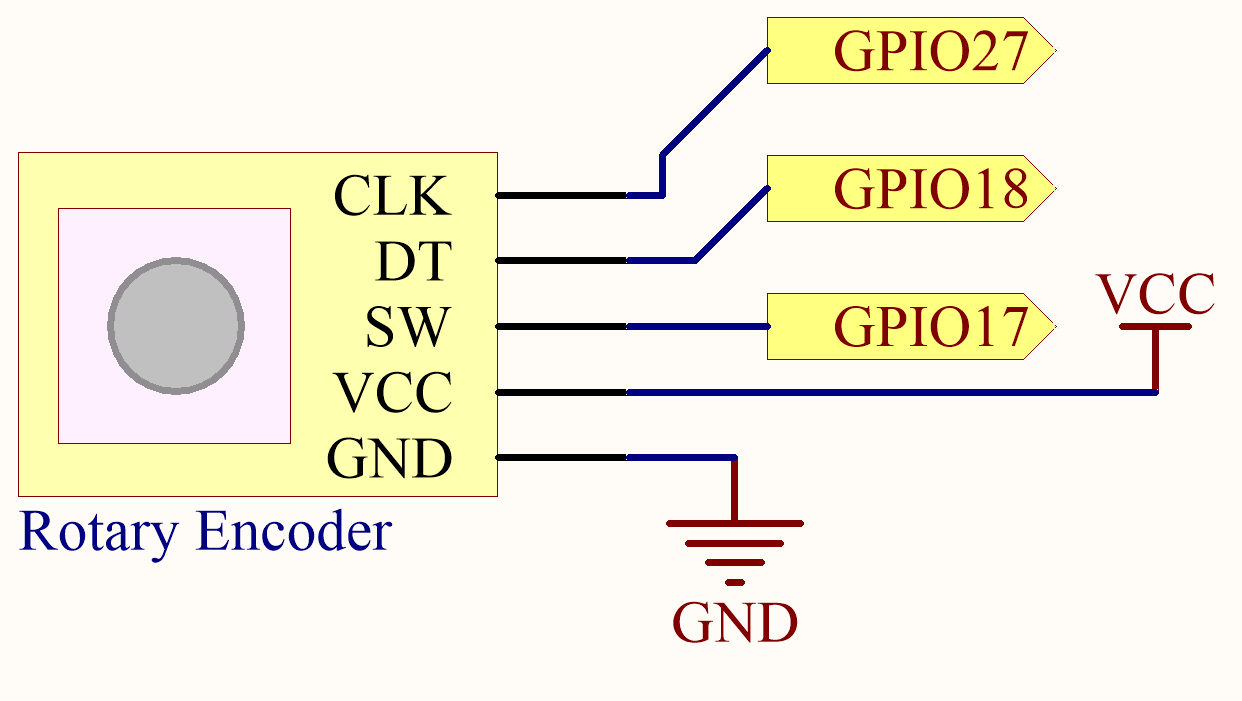
回路図
実験手順
ステップ1: 回路を組み立てます。

ステップ2: コードファイルを開きます。
cd ~/raphael-kit/c/2.1.6/
ステップ3: コードをコンパイルします。
gcc 2.1.6_RotaryEncoder.c -lwiringPi
ステップ4: 実行します。
sudo ./a.out
シェル上でカウントが表示されます。ロータリーエンコーダを時計回りに回すと、カウントが増えます。反時計回りに回すと、カウントが減少します。ロータリーエンコーダのスイッチを押すと、読み取り値がゼロにリセットされます。
注釈
実行後に動作しない、または「wiringPi.h: No such file or directory」というエラープロンプトが表示される場合は、 WiringPiのインストールと確認 を参照してください。
コード
#include <stdio.h>
#include <string.h>
#include <errno.h>
#include <stdlib.h>
#include <wiringPi.h>
#define clkPin 0
#define dtPin 1
#define swPin 2
static volatile int globalCounter = 0 ;
unsigned char flag;
unsigned char Last_dtPin_Status;
unsigned char Current_dtPin_Status;
void btnISR(void)
{
globalCounter = 0;
}
void rotaryDeal(void)
{
Last_dtPin_Status = digitalRead(dtPin);
while(!digitalRead(clkPin)){
Current_dtPin_Status = digitalRead(dtPin);
flag = 1;
}
if(flag == 1){
flag = 0;
if((Last_dtPin_Status == 0)&&(Current_dtPin_Status == 1)){
globalCounter --;
}
if((Last_dtPin_Status == 1)&&(Current_dtPin_Status == 0)){
globalCounter ++;
}
}
}
int main(void)
{
if(wiringPiSetup() < 0){
fprintf(stderr, "Unable to setup wiringPi:%s\n",strerror(errno));
return 1;
}
pinMode(swPin, INPUT);
pinMode(clkPin, INPUT);
pinMode(dtPin, INPUT);
pullUpDnControl(swPin, PUD_UP);
if(wiringPiISR(swPin, INT_EDGE_FALLING, &btnISR) < 0){
fprintf(stderr, "Unable to init ISR\n",strerror(errno));
return 1;
}
int tmp = 0;
while(1){
rotaryDeal();
if (tmp != globalCounter){
printf("%d\n", globalCounter);
tmp = globalCounter;
}
}
return 0;
}
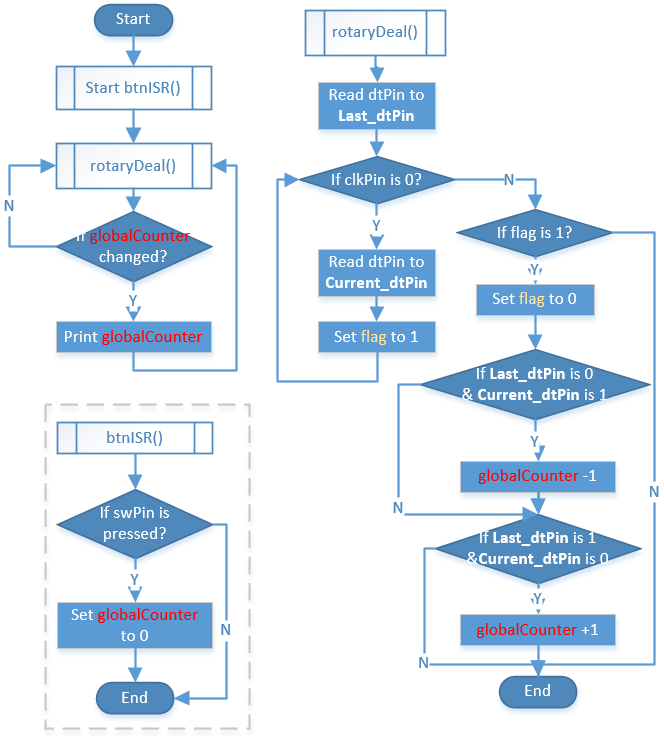
コード説明
clkPinが低いときにdtPinの値を読み取ります。
clkPinが高い場合、dtPinが低から高になると、カウントは減少します。それ以外の場合はカウントが増加します。
シャフトが押されるとswPinは低を出力します。
これに基づいて、以下のプログラムフローが示されます。
現象の画像
