Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder Raspberry Pi & Arduino & ESP32 en Facebook. Profundiza en Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte Experto: Resuelve problemas post-venta y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Preestrenos Exclusivos: Obtén acceso anticipado a nuevos anuncios de productos y adelantos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más nuevos.
Promociones Festivas y Sorteos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
2.2.9 Módulo MPU6050
Introducción
El MPU-6050 es el primer y único dispositivo de seguimiento de movimiento de 6 ejes del mundo (3 ejes de giroscopio y 3 ejes de acelerómetro) diseñado para teléfonos inteligentes, tabletas y sensores portátiles que tienen estas características, incluyendo bajo consumo de energía, bajo costo y alto rendimiento.
En este experimento, usa I2C para obtener los valores del sensor de aceleración de tres ejes y el giroscopio de tres ejes del MPU6050 y mostrarlos en la pantalla.
Componentes Necesarios
En este proyecto, necesitamos los siguientes componentes.
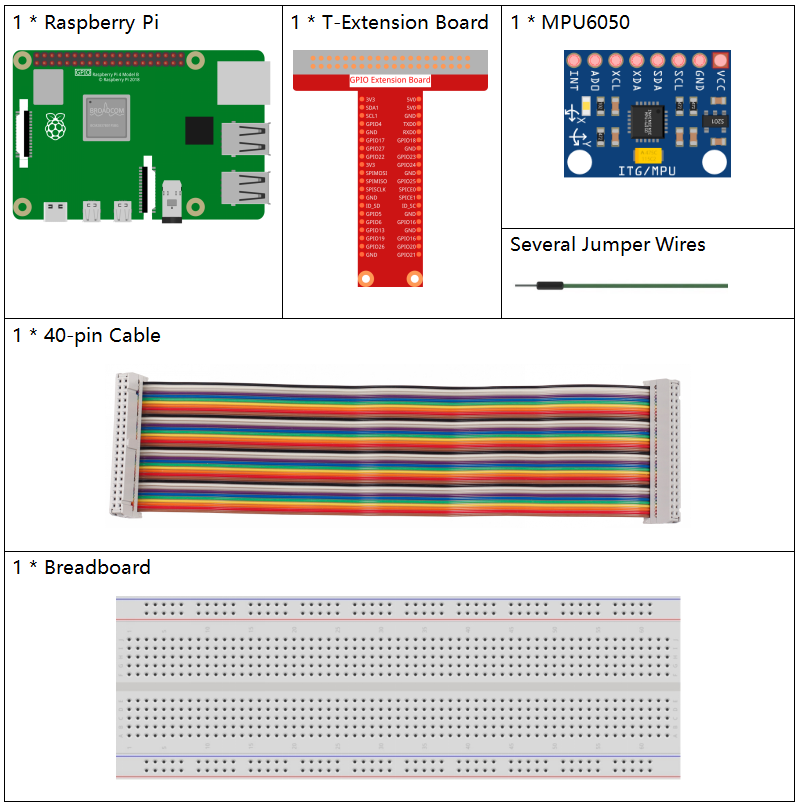
Es definitivamente conveniente comprar un kit completo, aquí está el enlace:
Nombre |
ARTÍCULOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Raphael |
337 |
También puedes comprarlos por separado en los enlaces a continuación.
INTRODUCCIÓN DE COMPONENTES |
ENLACE DE COMPRA |
|---|---|
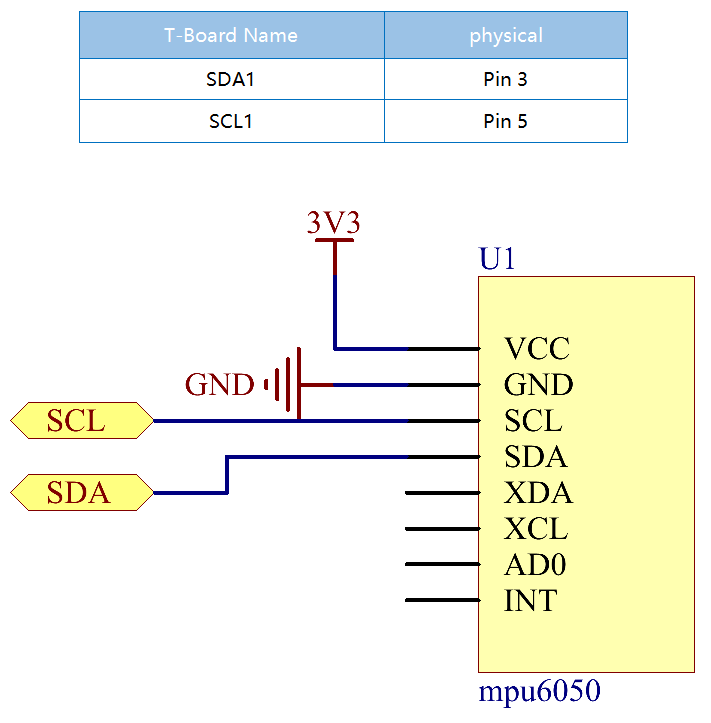
Diagrama Esquemático
El MPU6050 se comunica con el microcontrolador a través de la interfaz del bus I2C. El SDA1 y el SCL1 deben estar conectados al pin correspondiente.
Procedimientos Experimentales
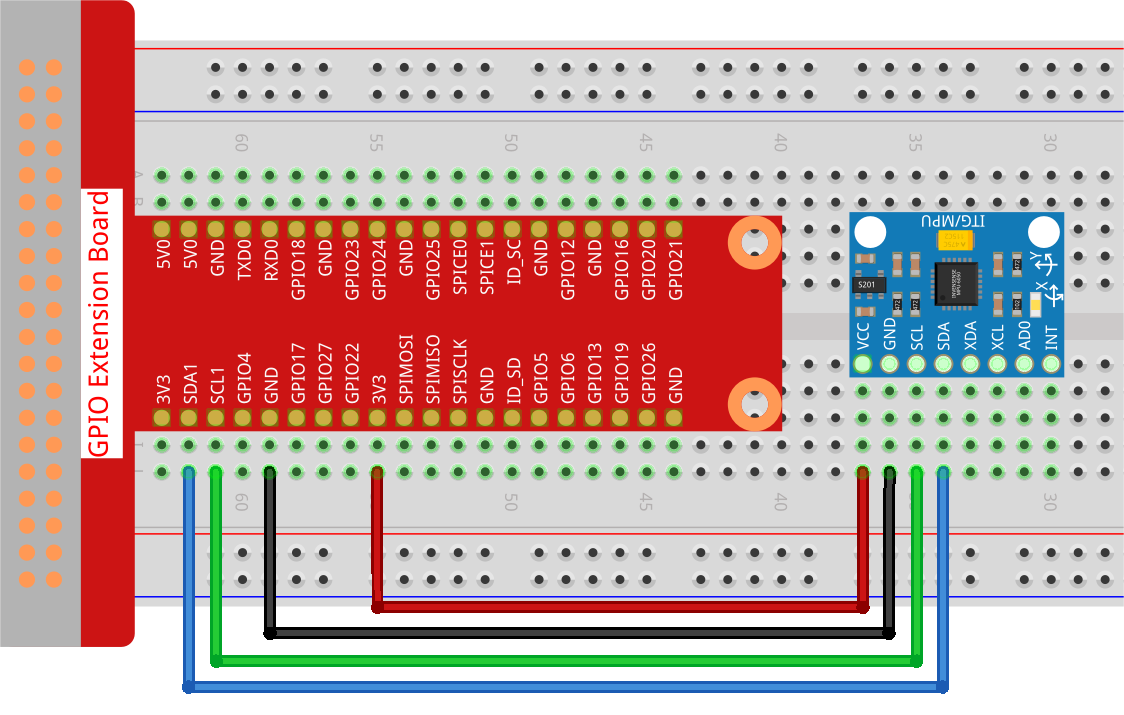
Paso 1: Construir el circuito.
Paso 2: Configurar I2C (ver Apéndice Configuración de I²C. Si ya has configurado I2C, omite este paso).
Paso 3: Ve a la carpeta del código.
cd ~/raphael-kit/python-pi5
Paso 4: Ejecuta el archivo ejecutable.
sudo python3 2.2.9_mpu6050_zero.py
Cuando se ejecute el código, el ángulo de desviación de los ejes x e y, así como la aceleración y velocidad angular en cada eje leída por el MPU6050, se mostrarán en la pantalla después de ser calculados.
Nota
Si obtienes el error
FileNotFoundError: [Errno 2] No such file or directory: '/dev/i2c-1', necesitas consultar Configuración de I²C para habilitar el I2C.Si obtienes el error
ModuleNotFoundError: No module named 'smbus2', por favor ejecutasudo apt install python3-smbus2.Si aparece el error
OSError: [Errno 121] Remote I/O error, significa que el módulo está mal conectado o está roto.
Advertencia
Si recibe el mensaje de error RuntimeError: Cannot determine SOC peripheral base address, consulte Si «gpiozero» no funciona.
Código
Nota
Puedes Modificar/Restablecer/Copiar/Ejecutar/Detener el código a continuación. Pero antes de eso, necesitas ir a la ruta del código fuente como raphael-kit/python-pi5. Después de modificar el código, puedes ejecutarlo directamente para ver el efecto.
import smbus
import math
import time
# Registros de gestión de energía
power_mgmt_1 = 0x6b
power_mgmt_2 = 0x6c
def read_byte(adr):
return bus.read_byte_data(address, adr)
def read_word(adr):
high = bus.read_byte_data(address, adr)
low = bus.read_byte_data(address, adr+1)
val = (high << 8) + low
return val
def read_word_2c(adr):
val = read_word(adr)
if (val >= 0x8000):
return -((65535 - val) + 1)
else:
return val
def dist(a,b):
return math.sqrt((a*a)+(b*b))
def get_y_rotation(x,y,z):
radians = math.atan2(x, dist(y,z))
return -math.degrees(radians)
def get_x_rotation(x,y,z):
radians = math.atan2(y, dist(x,z))
return math.degrees(radians)
bus = smbus.SMBus(1) # or bus = smbus.SMBus(1) for Revision 2 boards
address = 0x68 # Esta es la dirección leída a través del comando i2cdetect
# Ahora despierta el 6050 ya que empieza en modo de suspensión
bus.write_byte_data(address, power_mgmt_1, 0)
while True:
time.sleep(0.1)
gyro_xout = read_word_2c(0x43)
gyro_yout = read_word_2c(0x45)
gyro_zout = read_word_2c(0x47)
print ("gyro_xout : ", gyro_xout, " scaled: ", (gyro_xout / 131))
print ("gyro_yout : ", gyro_yout, " scaled: ", (gyro_yout / 131))
print ("gyro_zout : ", gyro_zout, " scaled: ", (gyro_zout / 131))
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
print ("accel_xout: ", accel_xout, " scaled: ", accel_xout_scaled)
print ("accel_yout: ", accel_yout, " scaled: ", accel_yout_scaled)
print ("accel_zout: ", accel_zout, " scaled: ", accel_zout_scaled)
print ("x rotation: " , get_x_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))
print ("y rotation: " , get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))
time.sleep(1)
Explicación del Código
Leer los datos del sensor enviados por el MPU6050.
def read_word(adr): high = bus.read_byte_data(address, adr) low = bus.read_byte_data(address, adr+1) val = (high << 8) + low return val def read_word_2c(adr): val = read_word(adr) if (val >= 0x8000): return -((65535 - val) + 1) else: return val
Calcular el ángulo de deflexión del eje y.
def get_y_rotation(x,y,z): radians = math.atan2(x, dist(y,z)) return -math.degrees(radians)
Calcular el ángulo de deflexión del eje x.
def get_x_rotation(x,y,z): radians = math.atan2(y, dist(x,z)) return math.degrees(radians)
Leer los valores de los ejes x, y y z en el sensor giroscópico, convertir los metadatos en valores de velocidad angular y luego imprimirlos.
gyro_xout = read_word_2c(0x43) gyro_yout = read_word_2c(0x45) gyro_zout = read_word_2c(0x47) print ("gyro_xout : ", gyro_xout, " scaled: ", (gyro_xout / 131)) print ("gyro_yout : ", gyro_yout, " scaled: ", (gyro_yout / 131)) print ("gyro_zout : ", gyro_zout, " scaled: ", (gyro_zout / 131))
Leer los valores de los ejes x, y y z en el sensor de aceleración, convertir los elementos en valores de aceleración (unidad de gravedad) e imprimirlos.
accel_xout = read_word_2c(0x3b) accel_yout = read_word_2c(0x3d) accel_zout = read_word_2c(0x3f) accel_xout_scaled = accel_xout / 16384.0 accel_yout_scaled = accel_yout / 16384.0 accel_zout_scaled = accel_zout / 16384.0 print ("accel_xout: ", accel_xout, " scaled: ", accel_xout_scaled) print ("accel_yout: ", accel_yout, " scaled: ", accel_yout_scaled) print ("accel_zout: ", accel_zout, " scaled: ", accel_zout_scaled)
Imprimir los ángulos de deflexión de los ejes x e y.
print ("x rotation: " , get_x_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)) print ("y rotation: " , get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))