Nota
¡Hola, bienvenido a la Comunidad de Entusiastas de SunFounder Raspberry Pi, Arduino y ESP32 en Facebook! Sumérgete más en Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte de Expertos: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances Exclusivos: Obtén acceso temprano a nuevos anuncios de productos y adelantos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más nuevos.
Promociones y Sorteos Festivos: Participa en sorteos y promociones festivas.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo!
2.2.9 Módulo MPU6050
Introducción
El MPU-6050 es el primer y único dispositivo de seguimiento de movimiento de 6 ejes del mundo (Giroscopio de 3 ejes y Acelerómetro de 3 ejes) diseñado para teléfonos inteligentes, tabletas y sensores portátiles que tienen estas características, incluyendo requisitos de bajo consumo, bajo costo y alto rendimiento.
En este experimento, utilizaremos I2C para obtener los valores del sensor de aceleración de tres ejes y el giroscopio de tres ejes del MPU6050 y mostrarlos en la pantalla.
Componentes Necesarios
En este proyecto, necesitamos los siguientes componentes.
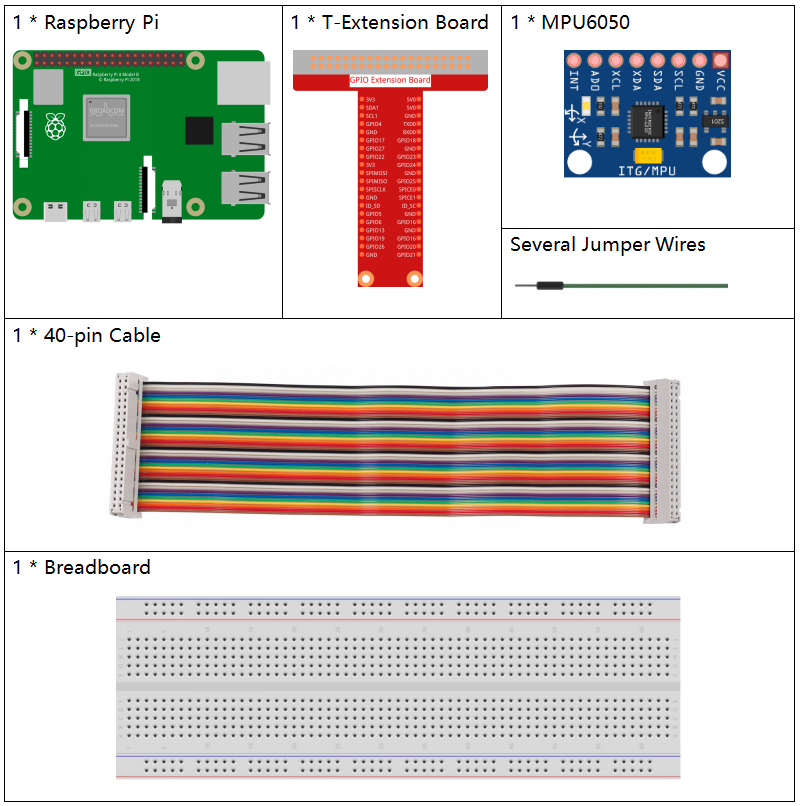
Es definitivamente conveniente comprar un kit completo, aquí está el enlace:
Nombre |
ARTÍCULOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Raphael |
337 |
También puedes comprarlos por separado en los enlaces a continuación.
INTRODUCCIÓN DE COMPONENTES |
ENLACE DE COMPRA |
|---|---|
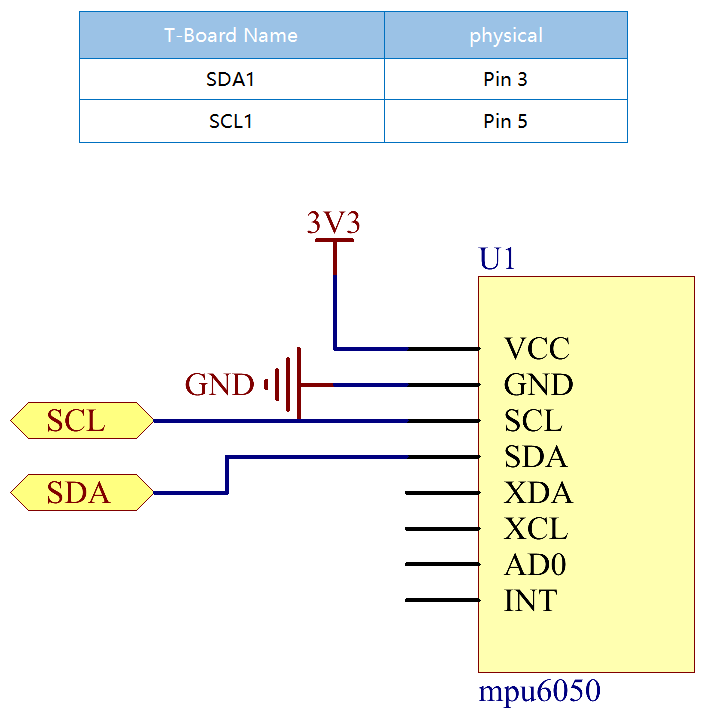
Diagrama Esquemático
El MPU6050 se comunica con el microcontrolador a través de la interfaz de bus I2C. El SDA1 y SCL1 deben estar conectados al pin correspondiente.
Procedimientos Experimentales
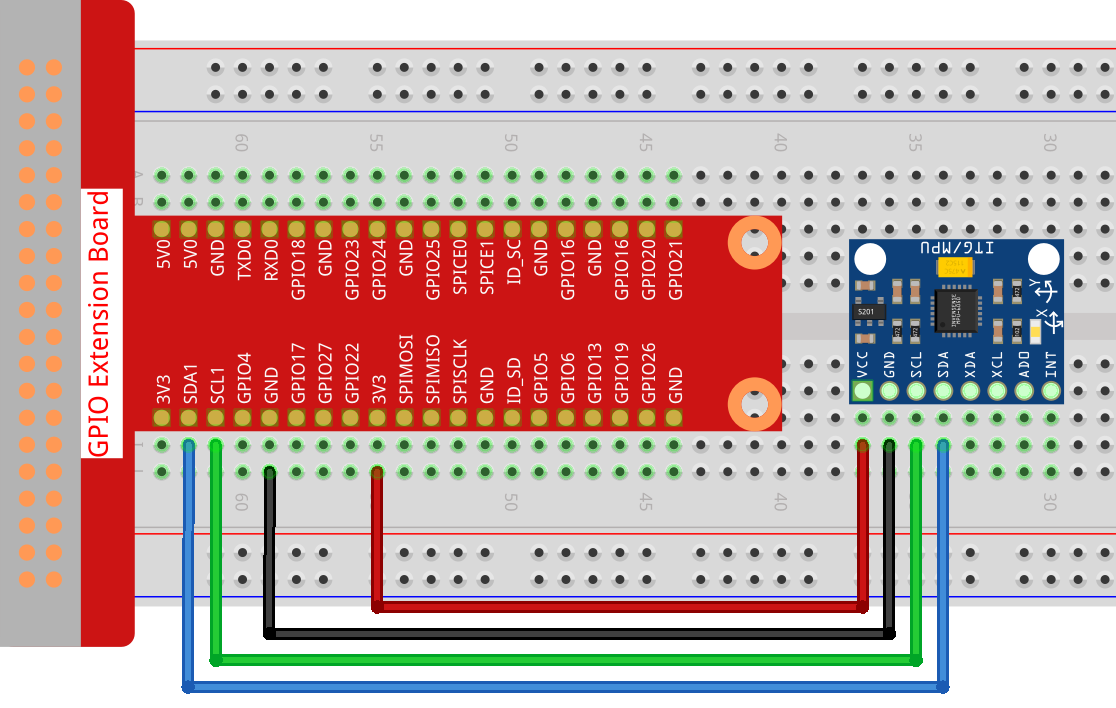
Paso 1: Construir el circuito.
Paso 2: Configurar I2C (ver Apéndice Configuración de I²C. Si ya has configurado I2C, omite este paso.)
Paso 3: Ir a la carpeta del código.
cd ~/raphael-kit/c/2.2.9/
Paso 4: Compilar el código.
gcc 2.2.9_mpu6050.c -lwiringPi -lm
Paso 5: Ejecutar el archivo ejecutable.
sudo ./a.out
Con el código ejecutándose, el ángulo de deflexión del eje x, el eje y y la aceleración, la velocidad angular en cada eje leída por el MPU6050 se imprimirá en la pantalla después de ser calculada.
Nota
Si aparece el mensaje de error
wiringPi.h: No such file or directory, por favor consulta Instalar y verificar WiringPi.Si obtienes el error
Unable to open I2C device: No such file or directory, necesitas consultar Configuración de I²C para habilitar I2C y verificar si el cableado es correcto.
Código
#include <wiringPiI2C.h>
#include <wiringPi.h>
#include <stdio.h>
#include <math.h>
int fd;
int acclX, acclY, acclZ;
int gyroX, gyroY, gyroZ;
double acclX_scaled, acclY_scaled, acclZ_scaled;
double gyroX_scaled, gyroY_scaled, gyroZ_scaled;
int read_word_2c(int addr)
{
int val;
val = wiringPiI2CReadReg8(fd, addr);
val = val << 8;
val += wiringPiI2CReadReg8(fd, addr+1);
if (val >= 0x8000)
val = -(65536 - val);
return val;
}
double dist(double a, double b)
{
return sqrt((a*a) + (b*b));
}
double get_y_rotation(double x, double y, double z)
{
double radians;
radians = atan2(x, dist(y, z));
return -(radians * (180.0 / M_PI));
}
double get_x_rotation(double x, double y, double z)
{
double radians;
radians = atan2(y, dist(x, z));
return (radians * (180.0 / M_PI));
}
int main()
{
fd = wiringPiI2CSetup (0x68);
wiringPiI2CWriteReg8 (fd,0x6B,0x00);//disable sleep mode
printf("set 0x6B=%X\n",wiringPiI2CReadReg8 (fd,0x6B));
while(1) {
gyroX = read_word_2c(0x43);
gyroY = read_word_2c(0x45);
gyroZ = read_word_2c(0x47);
gyroX_scaled = gyroX / 131.0;
gyroY_scaled = gyroY / 131.0;
gyroZ_scaled = gyroZ / 131.0;
//Print values for the X, Y, and Z axes of the gyroscope sensor.
printf("My gyroX_scaled: %f\n", gyroY X_scaled);
printf("My gyroY_scaled: %f\n", gyroY Y_scaled);
printf("My gyroZ_scaled: %f\n", gyroY Z_scaled);
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
//Print the X, Y, and Z values of the acceleration sensor.
printf("My acclX_scaled: %f\n", acclX_scaled);
printf("My acclY_scaled: %f\n", acclY_scaled);
printf("My acclZ_scaled: %f\n", acclZ_scaled);
printf("My X rotation: %f\n", get_x_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
printf("My Y rotation: %f\n", get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
delay(100);
}
return 0;
}
Explicación del Código
int read_word_2c(int addr)
{
int val;
val = wiringPiI2CReadReg8(fd, addr);
val = val << 8;
val += wiringPiI2CReadReg8(fd, addr+1);
if (val >= 0x8000)
val = -(65536 - val);
return val;
}
Leer datos del sensor enviados desde el MPU6050.
double get_y_rotation(double x, double y, double z)
{
double radians;
radians = atan2(x, dist(y, z));
return -(radians * (180.0 / M_PI));
}
Obtenemos el ángulo de deflexión en el eje Y.
double get_x_rotation(double x, double y, double z)
{
double radians;
radians = atan2(y, dist(x, z));
return (radians * (180.0 / M_PI));
}
Calcular el ángulo de deflexión del eje X.
gyroX = read_word_2c(0x43);
gyroY = read_word_2c(0x45);
gyroZ = read_word_2c(0x47);
gyroX_scaled = gyroX / 131.0;
gyroY_scaled = gyroY / 131.0;
gyroZ_scaled = gyroZ / 131.0;
//Print values for the X, Y, and Z axes of the gyroscope sensor.
printf("My gyroX_scaled: %f\n", gyroY X_scaled);
printf("My gyroY_scaled: %f\n", gyroY Y_scaled);
printf("My gyroZ_scaled: %f\n", gyroY Z_scaled);
Leer los valores de los ejes x, y y z en el sensor de giroscopio, convertir los metadatos en valores de velocidad angular y luego imprimirlos.
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
//Print the X, Y, and Z values of the acceleration sensor.
printf("My acclX_scaled: %f\n", acclX_scaled);
printf("My acclY_scaled: %f\n", acclY_scaled);
printf("My acclZ_scaled: %f\n", acclZ_scaled);
Leer los valores de los ejes x, y y z en el sensor de aceleración, convertir los metadatos en valores de velocidad acelerada (unidad de gravedad) y luego imprimirlos.
printf("My X rotation: %f\n", get_x_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
printf("My Y rotation: %f\n", get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
Imprimir los ángulos de deflexión de los ejes x e y.
Imagen del Fenómeno
