Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauchen Sie tiefer in Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten ein.
Warum beitreten?
Expertenunterstützung: Lösen Sie Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Tutorials aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugriff auf neue Produktankündigungen und exklusive Einblicke.
Spezielle Rabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Giveaways: Nehmen Sie an Verlosungen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu forschen und zu kreieren? Klicken Sie auf [hier] und treten Sie noch heute bei!
2.1.9 Joystick (MCP3008)
Einführung
In diesem Projekt lernen wir, wie ein Joystick funktioniert. Wir bewegen den Joystick und zeigen die Ergebnisse auf dem Bildschirm an.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten:

Es ist definitiv bequem, ein komplettes Kit zu kaufen. Hier ist der Link:
Name |
ELEMENTE IN DIESEM KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
Sie können die Komponenten auch einzeln über die folgenden Links kaufen:
KOMPONENTENBESCHREIBUNG |
KAUFLINK |
|---|---|
- |
|
- |
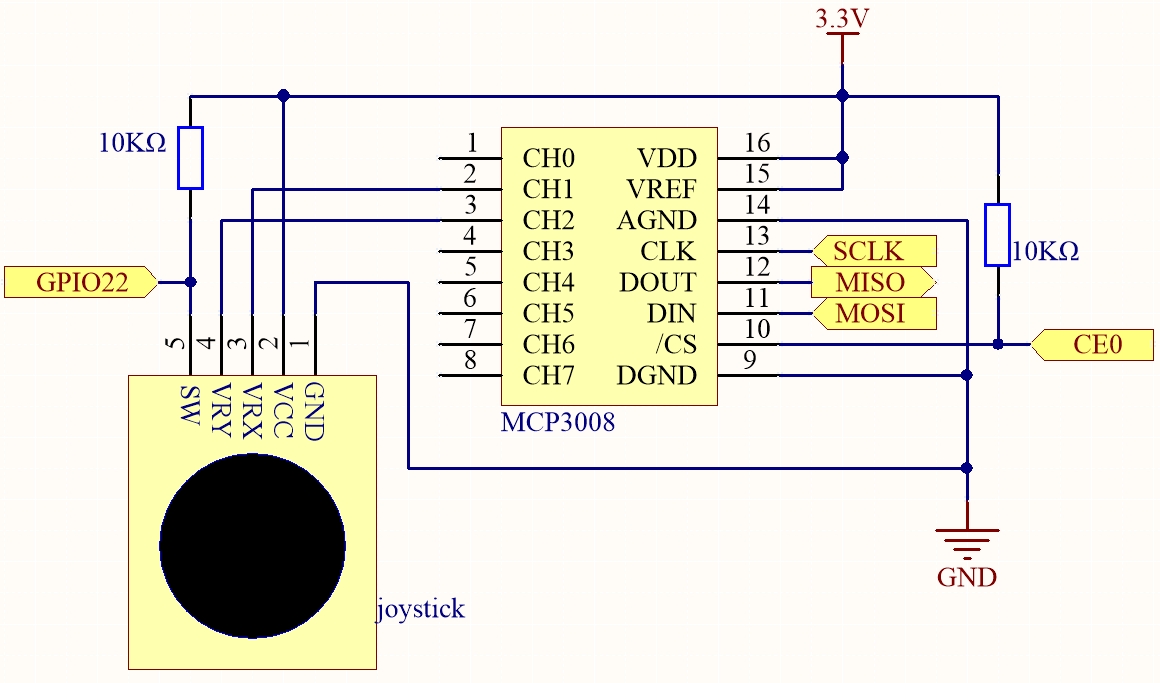
Schaltplan
Beim Auslesen der Joystick-Daten gibt es Unterschiede zwischen den Achsen: Die Daten der X- und Y-Achse sind analog und müssen mit dem MCP3008 in digitale Werte umgewandelt werden. Die Daten der Z-Achse sind digital, sodass Sie diese direkt über GPIO auslesen können oder ebenfalls den ADC verwenden können.
Experimentelle Verfahren
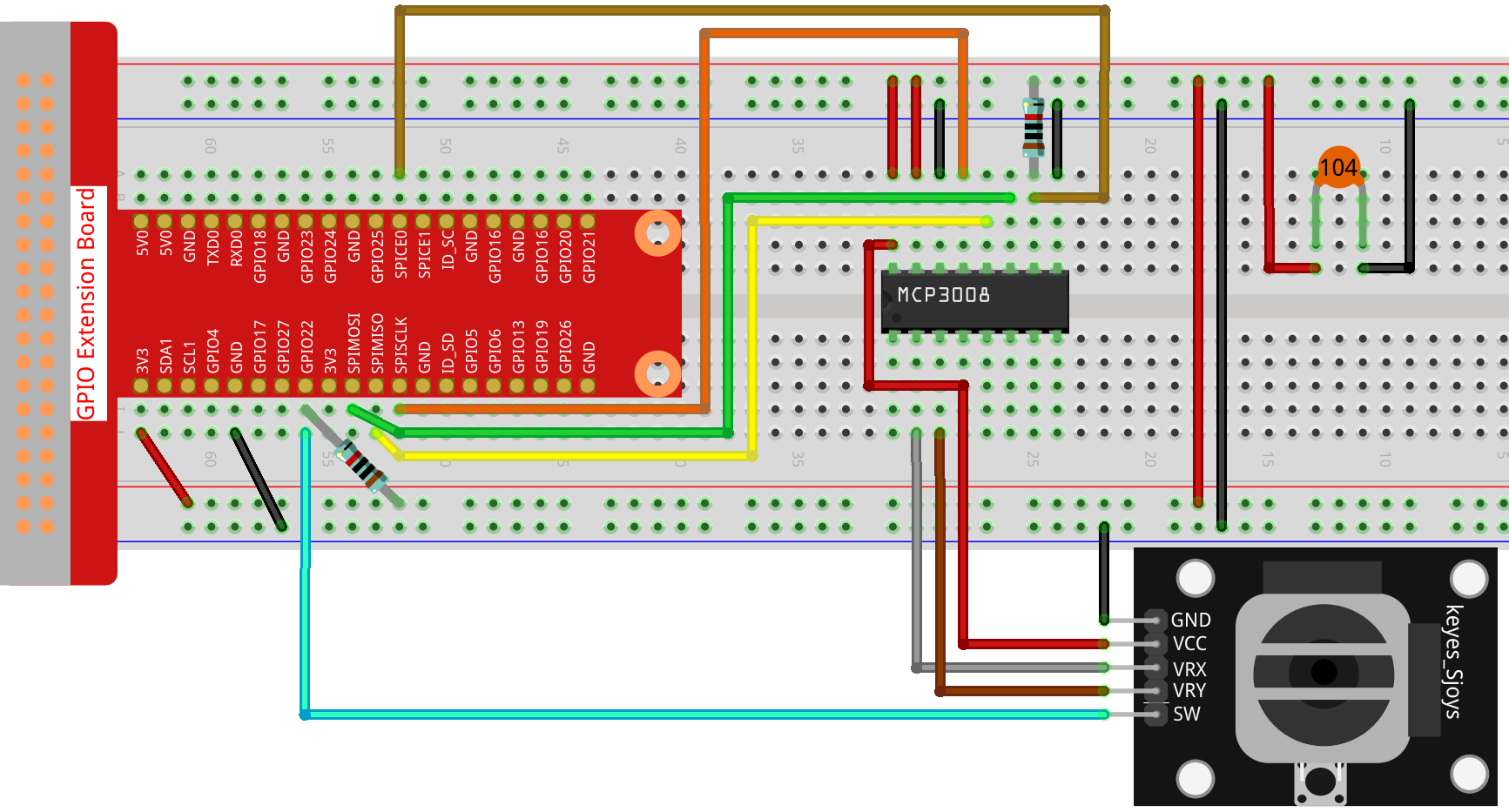
Schritt 1: Bauen Sie den Stromkreis auf.
Schritt 2: Wechseln Sie in den Code-Ordner.
cd ~/raphael-kit/nodejs/
Schritt 3: Führen Sie den Code aus.
sudo node joystick-2.js
Nach dem Start des Codes bewegen Sie den Joystick, und die entsprechenden Werte von x, y und Btn werden auf dem Bildschirm angezeigt.
Code
const Gpio = require('pigpio').Gpio;
const mcpadc = require('mcp-spi-adc');
// Öffne Kanal 1 (X-Achse)
const xChannel = mcpadc.openMcp3008(1, { speedHz: 1350000 }, (err) => {
if (err) {
console.error('Fehler beim Öffnen des X-Kanals:', err);
process.exit(1);
}
});
// Öffne Kanal 2 (Y-Achse)
const yChannel = mcpadc.openMcp3008(2, { speedHz: 1350000 }, (err) => {
if (err) {
console.error('Fehler beim Öffnen des Y-Kanals:', err);
process.exit(1);
}
});
// Tastereingang auf GPIO22 mit Pull-Up-Widerstand
const btn = new Gpio(22, {
mode: Gpio.INPUT,
pullUpDown: Gpio.PUD_UP,
});
// Lese-Schleife
setInterval(() => {
xChannel.read((errX, xReading) => {
if (errX) {
console.error('Fehler beim Lesen des X-Kanals:', errX);
return;
}
yChannel.read((errY, yReading) => {
if (errY) {
console.error('Fehler beim Lesen des Y-Kanals:', errY);
return;
}
const x_val = Math.round(xReading.value * 1023);
const y_val = Math.round(yReading.value * 1023);
const btn_val = btn.digitalRead();
console.log(`x = ${x_val}, y = ${y_val}, btn = ${btn_val}\n`);
});
});
}, 100);
Code-Erklärung
const mcpadc = require('mcp-spi-adc');
Diese Zeile importiert das Modul mcp-spi-adc, das die Kommunikation mit dem MCP3008-ADC unter Verwendung der SPI-Hardware-Schnittstelle des Raspberry Pi ermöglicht.
const xChannel = mcpadc.openMcp3008(1, { speedHz: 1350000 }, ...);
const yChannel = mcpadc.openMcp3008(2, { speedHz: 1350000 }, ...);
Diese Zeilen öffnen die analogen Eingangskanäle 1 und 2 des MCP3008, um die Signale der X- und Y-Achse des Joysticks auszulesen. Die SPI-Kommunikationsgeschwindigkeit ist auf 1,35 MHz eingestellt.
const btn = new Gpio(22, {
mode: Gpio.INPUT,
pullUpDown: Gpio.PUD_UP,
});
Initialisiert den GPIO-Pin 22 als digitalen Eingang mit internem Pull-Up-Widerstand. Dieser Pin wird verwendet, um den Status eines Tasters zu lesen.
setInterval(() => {
xChannel.read(...);
yChannel.read(...);
}, 100);
Diese Funktion wird alle 100 Millisekunden ausgeführt. Sie liest die X- und Y-Achsenwerte des Joysticks über die MCP3008-Kanäle 1 und 2 per SPI aus.
Die Gleitkommawerte (Bereich 0,0–1,0) werden in 10-Bit-Ganzzahlen (0–1023) umgerechnet.
Außerdem wird der Tasterstatus mit digitalRead() auf GPIO22 gelesen, der 0 zurückgibt, wenn er gedrückt ist, und 1, wenn er losgelassen wird.
Alle Werte werden auf der Konsole ausgegeben.