避障¶
在这个项目中,当 PiSloth 检测到障碍物时,它会发送信号并寻找另一个方向前进。
提示
这是在之前的项目的基础上,增加了自主判断,让 PiSloth 可以在移动中避开前面的障碍物。
示例
备注
你可以直接打开我们提供的示例或者是按照下图来编写程序,详细教程请参考 打开或新建项目。
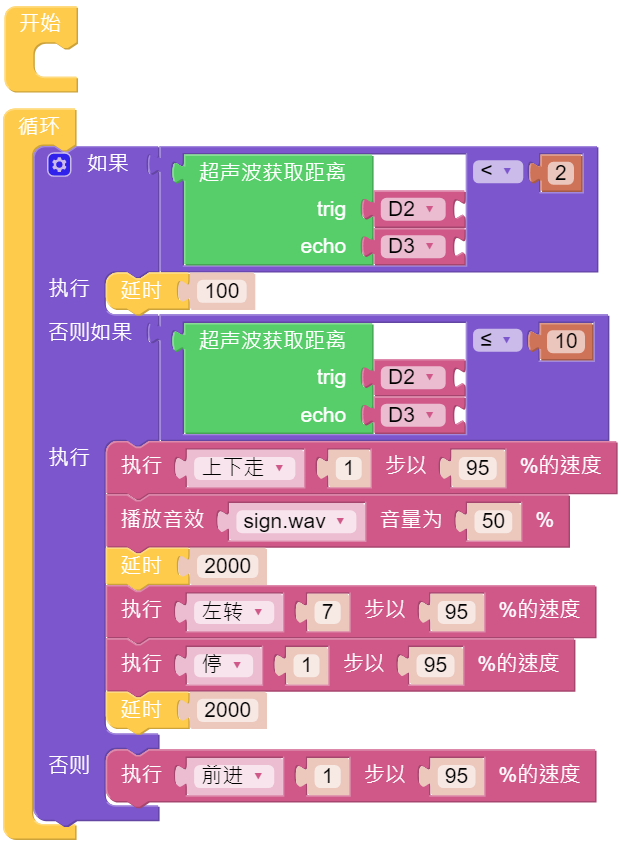
代码运行后,PiSloth 会向前走。如果检测到前方障碍物的距离小于10cm,它会停下来并发出警告,然后左转。如果左转后方向没有障碍物或障碍物距离大于10,则继续向前移动。
备注
由于超声波传感器模块的有效检测距离为2-400cm,当检测距离太近或者太远时,它将无法准确读取距离。