自定义步态¶
在之前的项目中,我们使用了很多我们自己写的动作,那么这些动作是如何组合和完成的呢?一般来说,一个动作由一个或多个步态组成。
在这个项目中,我们将学习如何自定义 PiSloth 的步态。
我们要做的就是使用遥控器页面中的按钮,让PiSloth完成下图所示的步态,然后得到4个舵机此时的角度。

第1步: 在遥控器中拖出9个按钮来控制PiSloth上4个舵机的旋转角度。

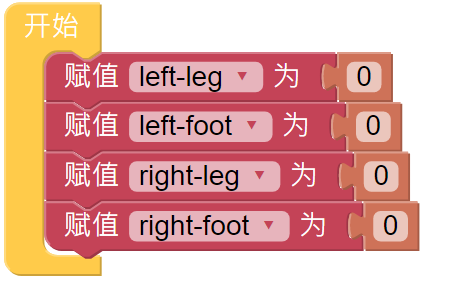
第2步: 创建 4 个变量来存储 4 个舵机的角度。

然后将角度初始化为 0。
第3步: 读取用于控制舵机角度的不同按钮的值。
按钮AB 控制 左腿。
按钮CD 控制 左脚。
按钮EF 控制 右腿。
按钮GH 控制 右脚。
按 按钮I,在调试监视器中打印 4 个舵机的角度。

第4步: 在 循环 块的末尾,填写读取到 4 个舵机中的角度值,并使用 执行动作 块让 PiSloth 执行此步骤。

第5步: 代码完成后,点击右下角的 下载 图标下载并运行代码。 现在我们可以点击 按钮 CD 和 按钮 GH (根据实际代码)使PiSloth姿势像这样,你也可以让它做其他步骤。
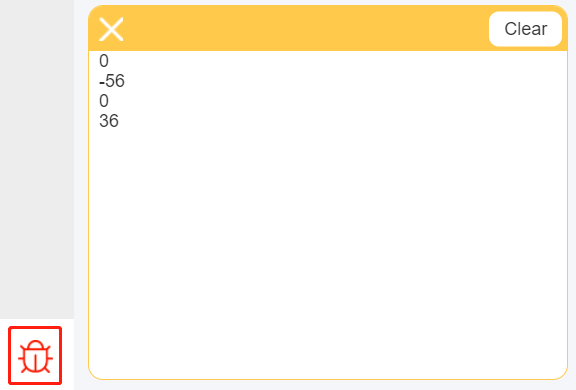
第6步: 点击左下角的小虫子图标打开调试监视器,当你按下 按钮I 时,你会在调试监视器中看到4个舵机的角度。
备注
如果出现多组数据,是因为点击按钮的时间长了一点,Ezblock会认为按钮被点击了数次。如果数据看着很杂乱,可以点调试监视器的右上角的清除按钮。
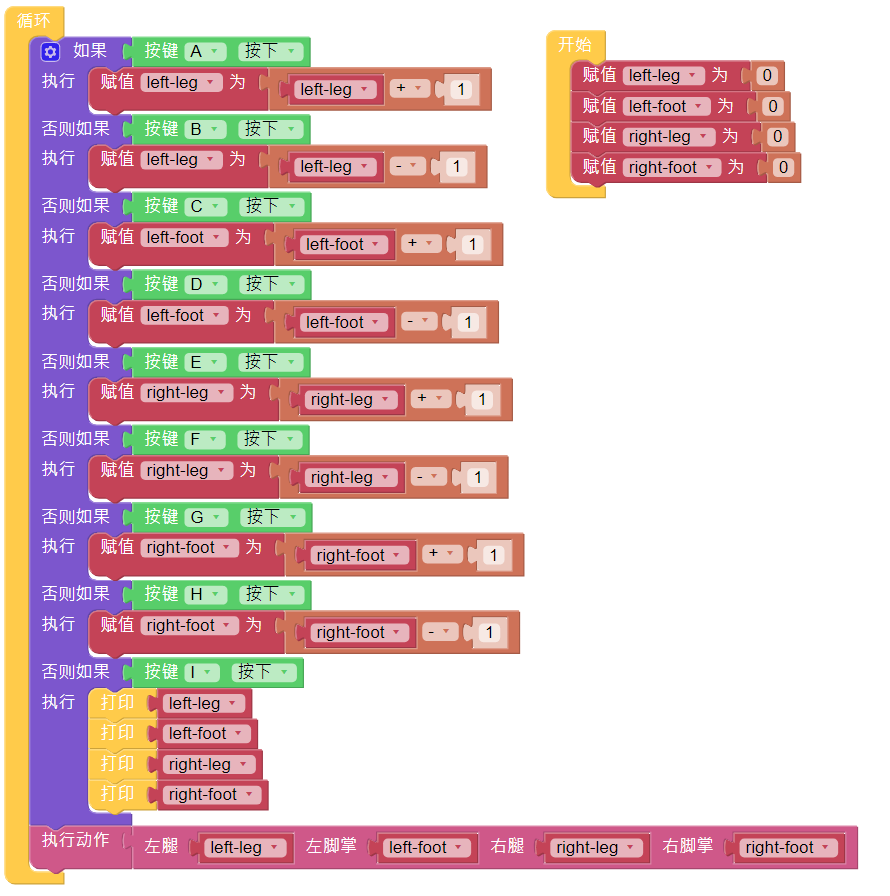
完整代码如下: